【实战演练】MATLAB simulink船舶动力定位模拟器
发布时间: 2024-05-22 00:08:51 阅读量: 154 订阅数: 193 
# 1. MATLAB Simulink 简介**
MATLAB Simulink 是 MathWorks 公司开发的一款图形化建模和仿真软件,广泛应用于工程、科学和教育领域。它提供了丰富的模块库和仿真环境,使工程师能够快速构建和仿真复杂系统。
Simulink 的核心概念是基于块状图建模,其中每个模块代表一个特定的功能或组件。用户可以通过拖放模块并连接它们来创建系统模型。Simulink 提供了广泛的模块库,涵盖了信号处理、控制系统、动力学和通信等领域。
此外,Simulink 还支持自定义模块开发,允许用户创建自己的模块来扩展其功能。这使得 Simulink 成为一个高度灵活的仿真平台,可以满足各种建模和仿真需求。
# 2. 船舶动力定位理论
### 2.1 动力定位系统原理
动力定位(DP)系统是一种先进的控制系统,用于将船舶保持在指定位置和航向,不受风、浪和洋流等外力影响。DP 系统通过使用推进器、舵机和传感器来实现这一目标。
**推进器和舵机**
DP 系统使用推进器和舵机来产生推力和扭矩,从而控制船舶的运动。推进器通常安装在船舶的船头、船尾和船侧,而舵机则安装在船舶的船尾。
**传感器**
DP 系统使用各种传感器来测量船舶的位置、航向和速度。这些传感器包括:
- **GPS(全球定位系统):** 用于测量船舶的绝对位置。
- **IMU(惯性测量单元):** 用于测量船舶的运动和航向。
- **风速计和风向仪:** 用于测量风力。
- **波浪传感器:** 用于测量波浪高度和周期。
### 2.2 控制算法设计
DP 系统的控制算法负责根据传感器数据计算所需的推力和扭矩,以将船舶保持在指定位置和航向。控制算法通常采用以下步骤:
1. **参考点计算:** 计算船舶的参考位置和航向。
2. **误差计算:** 计算船舶当前位置和航向与参考点之间的误差。
3. **控制律设计:** 设计控制律,根据误差计算所需的推力和扭矩。
4. **推力分配:** 将所需的推力和扭矩分配给推进器和舵机。
**控制律设计**
控制律设计是 DP 系统的关键部分。常用的控制律包括:
- **比例积分微分 (PID) 控制:** 这是最常用的控制律,它根据误差的比例、积分和微分来计算控制量。
- **状态反馈控制:** 这种控制律使用船舶的状态(位置、速度、加速度等)来计算控制量。
- **模型预测控制:** 这种控制律使用船舶的数学模型来预测未来的运动,并根据预测计算控制量。
**推力分配**
推力分配是将所需的推力和扭矩分配给推进器和舵机的过程。推力分配算法通常考虑以下因素:
- **推进器效率:** 不同推进器的效率不同,因此需要考虑推进器的效率以优化推力分配。
- **船舶动力学:** 船舶的动力学特性(例如,阻力、惯性)会影响推力分配。
- **安全约束:** 推力分配必须满足安全约束,例如推进器最大推力和舵机最大转角。
# 3. Simulink 建模实践
### 3.1 船舶动力学模型建立
**3.1.1 船舶运动方程**
船舶动力学模型描述了船舶在外部环境力作用下的运动状态。其运动方程为:
```
m(u - v) = X_H + X_P + X_R
m(v + u) = Y_H + Y_P + Y_R
I_z(r - p) = N_H + N_P + N_R
```
其中:
- $m$ 为船舶质量
- $u$ 为船舶纵向速度
- $v$ 为船舶横向速度
- $r$ 为船舶艏向角速度
- $p$ 为船舶横向角速度
- $X_H$、$Y_H$、$N_H$ 为水动力
- $X_P$、$Y_P$、$N_P$ 为推进力
- $X_R$、$Y_R$、$N_R$ 为阻尼力
**3.1.2 Simulink 模型构建**
根据船舶运动方程,可在 Simulink 中建立船舶动力学模型,如下图所示:
[图片:船舶动力学模型 Simulink 模型]
模型中,各模块功能如下:
- **船体动力学**:计算船舶水动力
- **推进器**:计算推进力
- **阻尼器**:计算阻尼力
- **积分器**:积分速度

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《MATLAB高级仿真合集》专栏汇集了MATLAB工具箱详解、GUI编程入门、金融建模工具箱操作等基础知识,以及涵盖汽车、电力系统、动力学系统、机器人、飞行器等领域的进阶仿真案例。专栏文章深入浅出地介绍了MATLAB工具箱的使用方法,并通过丰富的仿真实例展示了MATLAB在工程、科学和金融等领域的强大仿真能力。本专栏旨在帮助读者掌握MATLAB仿真技术,提升其在相关领域的专业技能。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
优化你的虚拟化环境:AMI VeB性能提升策略全解析
参考资源链接:[VeB白皮书:AMIVisual eBIOS图形固件开发环境详解](https://wenku.csdn.net/doc/6412b5cabe7fbd1778d44684?spm=1055.2635.3001.10343)
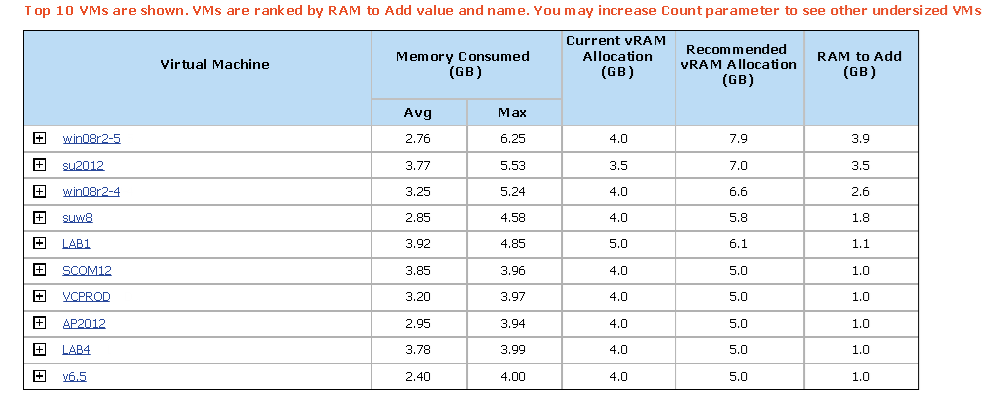
# 1. 虚拟化技术与性能挑战
在现代IT环境中,虚拟化技术已经变得不可或缺,它允许在单个物理硬件上运行多个虚拟机(VMs),从而提高
Calibre XRC:2023年最新指南,确保你的设计质量和效率在行业内遥遥领先
参考资源链接:[Calibre XRC:寄生参数提取与常用命令详解](https://wenku.csdn.net/doc/6412b4d3be7fbd1778d40f58?spm=1055.2635.3001.10343)
# 1. Calibre XRC概述与行业地位
## 1.1 Calibre XRC简介
【74HC154引脚使用技巧:设计调试的黄金法则】:关键注意事项大揭秘
参考资源链接:[74HC154详解:4线-16线译码器的引脚功能与应用](https://wenku.csdn.net/doc/32hp07jvry?spm=1055.2635.3001.10343)
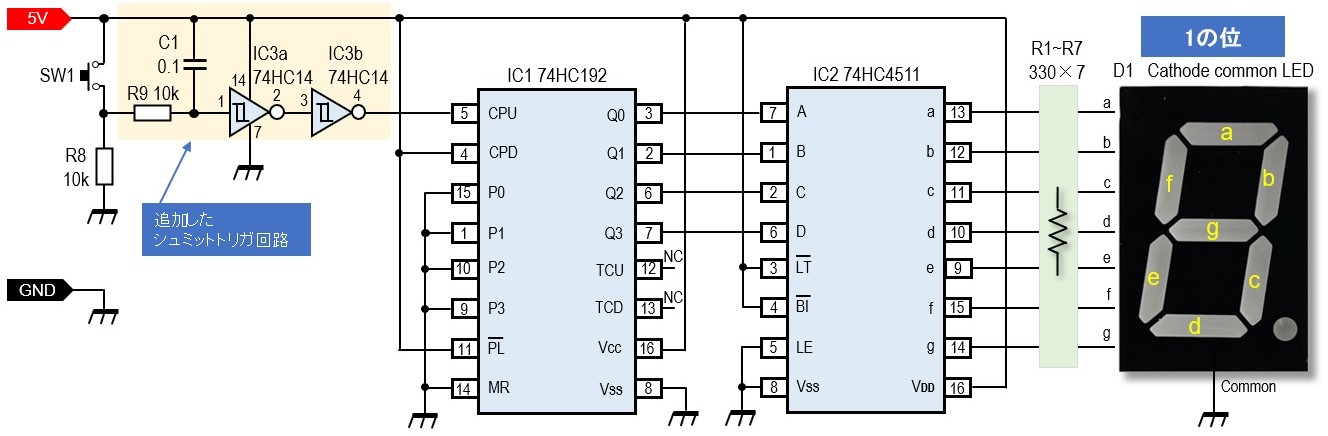
# 1. 74HC154引脚概述
数字逻辑电路设计是电子工程领域中不可或缺的一部分,而74HC154作为一款高性能的4到16线解码器/多路选择器,在设计中扮演着重要的角色。本章节将对74HC154的各个引脚进行概述,为后续章节的内容奠定基础。
74HC154
环境化学研究新工具:Avogadro模拟污染物行为实操

参考资源链接:[Avogadro中文教程:分子建模与可视化全面指南](https://wenku.csdn.net/doc/6b8oycfkbf?spm=1055.2635.3001.10343)
# 1. 环境化学研究中模拟工具的重要性
环境化学研究中,模拟工具已成为不可
【彩色文档打印无能?解决方法大公开】:奔图打印机彩印问题,专家支招

参考资源链接:[奔图打印机故障排除指南:卡纸、颜色浅、斑点与重影问题解析](https://wenku.csdn.net/doc/647841b8d12cbe7ec32e0260?spm=1055.2635.3001.10343)
# 1. 彩色文档打印的重要性与挑战
在现代商业环境中,彩色文档的打印已经变得不可或缺。随着技术的进步,彩色打印在营销、教育和日常办公中扮演着越来越重要的角色。它不
虚拟现实集成:3DSource零件库设计体验的新维度

参考资源链接:[3DSource零件库在线版:CAD软件集成的三维标准件库](https://wenku.csdn.net/doc/6wg8wzctvk?spm=1055.2635.3001.10343)
# 1. 虚拟现实技术与3D Source概述
## 虚拟现实技术基础
虚拟现实(VR)技术通过创造三维的计算机模拟环境,让用户能够沉浸在一个与现实世界完全不同的空间。随着硬件设备
V90 EPOS模式回零适应性:极端环境下的稳定运行分析

参考资源链接:[V90 EPOS模式下增量/绝对编码器回零方法详解](https://wenku.csdn.net/doc/6412b48abe7fbd1778d3ff04?spm=1055.2635.3001.10343)
# 1. V90 EPOS模式回零的原理与必要性
## 1.1 EPOS模式回零的基本概念
EPOS(电子位置设定)模式回零是指在电子控制系统中,自动或手动将设备的位置设定到初始的或预定的位置。这种机
【Python pip安装包的版本控制】:精确管理依赖版本的专家指南

参考资源链接:[Python使用pip安装报错ModuleNotFoundError: No module named ‘pkg_resources’的解决方法](https://wenku.csdn.net/doc/6412b4a3be7fbd1778d4049f?spm=1055.2635.3001.10343)
# 1. Python pip安装包管理概述
P
PLS UDE UAD扩展功能探索:插件与模块使用深度解析
参考资源链接:[UDE入门:Tricore多核调试详解及UAD连接步骤](https://wenku.csdn.net/doc/6412b6e5be7fbd1778d485ca?spm=1055.2635.3001.10343)
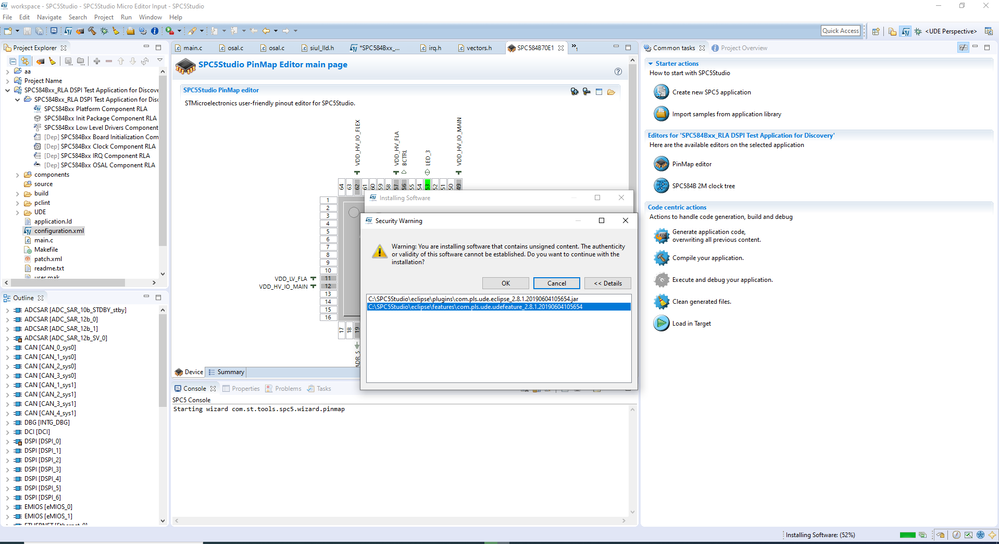
# 1. PLS UDE UAD基础介绍
在当今充满活力的信息技术领域,PLS UDE
GrblController教育应用指南:培育未来工程师的创新平台

参考资源链接:[GrblController安装与使用教程](https://wenku.csdn.net/doc/6412b792be7fbd1778d4ac76?spm=1055.2635.3001.10343)
# 1. GrblController概述与教育意义
GrblController作
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )