散列表的奥秘:掌握这些设计与优化技巧,算法快速响应
发布时间: 2024-09-09 21:21:30 阅读量: 33 订阅数: 43 

# 1. 散列表的基本概念与应用
散列表,也称为哈希表,是一种在计算机科学中广泛使用的数据结构,它通过哈希函数将键映射到数据值的位置上。它提供了快速的查找、插入和删除操作,其时间复杂度接近O(1),因而成为了IT行业中处理大规模数据时的首选。
## 1.1 散列表的定义与特性
散列表通过将键转换为数组索引来访问数据,它依赖于哈希函数来实现键与数组索引之间的映射。这个过程的关键在于哈希函数的设计,它需要保证数据分布的均匀性,减少冲突,以保证性能。一个好的哈希函数能够确保哈希表在最坏情况下依然保持较高的运行效率。
## 1.2 散列表的应用场景
散列表在多种应用场景中扮演着重要角色,例如:数据缓存、数据库索引、对象存储等。例如,在数据库索引中,散列表能够极大地加快查询速度,因为它能够快速定位到数据的位置,从而实现高效的数据检索。而在网络应用中,散列表用于会话管理、URL重写等场景,它能够帮助快速定位和管理用户的会话信息。
接下来的文章将继续深入探讨散列表的设计原理、优化技巧以及散列表在不同场景中的实际应用案例。
# 2. 散列表的设计原理
## 2.1 散列函数的选取与特性
### 2.1.1 常见散列函数类型
散列函数是散列表设计中的基石,它将键值映射到散列表的索引位置。不同类型的散列函数适用于不同的应用场景,以下是一些常见的散列函数类型:
- **除法散列法**:取键值对n取模操作,即 `index = key % array_size`。这种方法简单高效,但对表大小有特定要求,且可能会导致索引分布不均匀。
- **乘法散列法**:利用键值乘以一个常数然后对数组大小取模,`index = (key * A) % array_size`。其中`A`是一个常数小于1。乘法散列法的关键在于选择合适的`A`值,以保证良好的分布性。
- **数字分析散列法**:当键值由多部分组成时,这种方法分析键值中的位模式,并利用其中的“好模式”来构造散列函数。它适用于数据中已知特定位模式比较稳定的情况。
- **二次探查法**:在发生冲突时,使用二次函数作为步长。比如,当冲突发生时,索引调整为 `index = (key + i^2) % array_size`,其中`i`为冲突探测的次数。
每种散列函数类型都有其特点和适用范围,设计者需根据实际需求选择合适的散列函数。
### 2.1.2 散列函数的均匀分布原则
为了确保散列表的性能,散列函数必须尽量保证键值映射到散列表的位置是均匀的。不均匀的分布会导致较多的冲突,影响数据的存取效率。
均匀分布原则要求:
- **唯一性**:尽量保证不同的键值映射到不同的位置。这在实际中很难做到,但理想状态下应尽量避免冲突。
- **均匀性**:散列函数应使得所有可能的索引位置被键值映射的概率大致相等。
- **简单性**:散列函数应尽可能简单,以便快速计算,尤其是在需要高频率访问散列表的场景。
## 2.2 冲突解决策略
### 2.2.1 开放寻址法
开放寻址法是解决散列表冲突的一种方法,它规定当发生冲突时,系统会按照某一探测序列继续寻找下一个空槽位。常见的开放寻址法有线性探测、二次探测和双散列法。
- **线性探测**:当发生冲突时,从发生冲突的位置开始线性地顺序寻找下一个空槽位。
- **二次探测**:以步长为二次方数的序列进行探测,如 `1^2, -1^2, 2^2, -2^2, ...` 等。
- **双散列法**:使用另一个散列函数来决定探测序列,这样可以减少聚集现象。
### 2.2.2 链表法
链表法则是另一种处理冲突的策略,它在每个槽位上维护一个链表,将所有冲突的键值以链表的形式存储。
链表法的优点在于实现简单,且在理论上不会因为冲突而影响性能;但在极端情况下,如果所有元素都冲突,性能可能退化到链表的查询效率,即O(n)。
## 2.3 负载因子与扩容机制
### 2.3.1 负载因子的定义与影响
负载因子是散列表中实际键值数量与散列表大小的比值,定义为 `负载因子 = (散列表中元素数量) / (散列表的总槽位数量)`。
负载因子反映了散列表的填充程度,它直接影响散列表的性能:
- 负载因子小,说明散列表空间利用不充分,查找速度快,但占用空间较多。
- 负载因子大,说明散列表空间利用充分,空间效率高,但查找效率会降低。
### 2.3.2 扩容策略与性能考量
随着负载因子的增加,散列表的性能下降,因此需要定期扩容以维持良好的性能。扩容策略需要考虑以下几点:
- **扩容的时机**:通常在负载因子达到某个阈值(如0.75)时进行扩容。
- **扩容的方式**:一般有两种方式,一种是创建一个更大的散列表并将原散列表中的元素重新散列到新表中;另一种是在新表中存储新插入的元素,并逐渐迁移旧表中的数据。
```python
def resize_hash_table(hash_table, new_size):
"""
扩容散列表的函数。将原散列表中的元素重新散列到新大小的散列表中。
:param hash_table: 原散列表
:param new_size: 新的散列表大小
:return: 新的散列表
"""
new_hash_table = [None] * new_size
for index, element in enumerate(hash_table):
if element is not None:
# 重新计算元素位置并存入新散列表
new_index = hash_function(element.key) % new_size
new_hash_table[new_index] = element
return new_hash_table
```
- **性能考量**:扩容是一个成本较高的操作,因为需要重新散列所有元素。设计时要尽量减少扩容操作的频率,如采用合适的负载因子阈值和新散列表的大小策略。
# 3. 散列表的优化技巧
## 3.1 动态调整散列表大小
### 3.1.1 如何判断是否需要扩容
在散列表中,动态调整大小是优化性能的关键技巧之一。随着数据量的增加,如果不及时扩容,散列表的负载因子(load factor)将会升高。负载因子定义为散列表中元素个数(n)与槽位总数(m)的比值,即 `负载因子 = n / m`。当负载因子过高时,会导致更多的元素冲突,增加了查询和插入操作的时间复杂度,从而影响性能。
判断是否需要扩容可以基于负载因子阈值,当负载因子超过预设的阈值时,进行扩容。例如,对于开放寻址法,通常负载因子应该保持在0.5到0.7之间,而对于链表法,由于链表可以容纳多个元素,其负载因子可以适当高一些,比如0.7到0.8之间。
在实际操作中,可以通过以下步骤判断是否需要扩容:
1. 计算当前负载因子。
2. 比较负载因子是否超过了预设的阈值。
3. 如果超过阈值,则启动扩容机制。
```python
def should_resize(hashtable):
# 假设预设的负载因子阈值为0.7
load_factor_threshold = 0.7
# 计算当前负载因子
current_load_factor = len(hashtable) / hashtable.capacity
# 如果负载因子超过阈值,则返回True表示需要扩容
return current_load_factor > load_factor_threshold
```
### 3.1.2 扩容过程中的数据迁移策略
当决定扩容时,数据迁移是不可避免的环节。数据迁移的目的是将旧的散列表中的所有数据迁移到一个新的更大的散列表中。迁移策略的选择直接影响到扩容过程的效率。常见的迁移策略如下:
1. **一次性迁移**:在扩容时,直接创建一个新的散列表,并将旧散列表中的所有数据一次性迁移到新散列表中。这种方法简单直观,但是会导致扩容期间服务不可用。
2. **双散列表法**:在旧散列表旁创建一个新的散列表,并将新添加的元素添加到新散列表中。旧散列表的数据在查询或插入时会逐步迁移到新散列表中。这种方法可以保持服务的高可用性。
3. **渐进式迁移**:每次插入或更新时,不是立即进行迁移,而是在散列函数计算出新旧散列表的槽位后,将旧散列表中的对应数据迁移到新散列表中。这种方法可以平滑地进行数据迁移,不会影响服务的可用性。
以下是使用渐进式迁移的Python代码示例:
```python
def insert_or_update(hashtable, key, value):
# 计算key应该在散列表中的槽位
index = hashtable.hash_function(key) % hashtable.capacity
# 检查是否需要扩容
if should_resize(hashtable):
# 执行渐进式迁移,将旧散列表中的数据迁移到新散列表
rehash(hashtable)
# 检查是否为新元素
if hashtable.is_empty(index):
hashtable.put(key, value)
else:
for i in range(hashtable.size[index]):
if hashtable.table[index][i].key == key:
hashtable.table[index][i].value = value
break
def rehash(hashtable):
# 创建一个新的更大的散列表
new_capacity = get_new_capacity(hashtable.capacity)
new_hashtable = create_hashtable(new_capacity)
# 遍历旧散列表的所有槽位
for index in rang
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到“离散数据结构算法”专栏,在这里,我们将深入探索离散数据结构和算法的世界。从入门级基础到高级概念,我们的专家作者将为您提供全面的指南。
我们将涵盖一系列主题,包括:
* 离散数据结构的基础知识
* 图算法的实战应用
* 堆和优先队列的优化技术
* 离散数学在算法设计中的作用
* 二叉搜索树的深入解析和平衡技巧
* 动态规划的解密和高效算法构建
* 并查集的优化策略
* 字符串匹配算法的效率提升
* 红黑树和B树的比较分析
* 贪心算法的原理和实践
* 分治策略的大问题分解
* 排序算法的深度解析和效率提升策略
无论您是刚入门还是经验丰富的开发者,我们的专栏都将为您提供宝贵的见解和实用技巧,帮助您提升算法技能,解决现实世界的棘手问题。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
WinSXS历史组件淘汰术:彻底清除遗留的系统垃圾

# 摘要
WinSXS是Windows操作系统中的组件存储系统,它负责管理和维护系统文件的历史版本。随着Windows更新和功能迭代,WinSXS组件会逐渐积累,可能占用大量磁盘空间,影响系统性能。本文首先概述了WinSXS的历史及作用,随后详细分析了其淘汰机制,包括淘汰的工作原理、策略与方法。第三章提供了一套实践指南,涵盖检测、手动与自动化淘汰步骤,以及处理淘
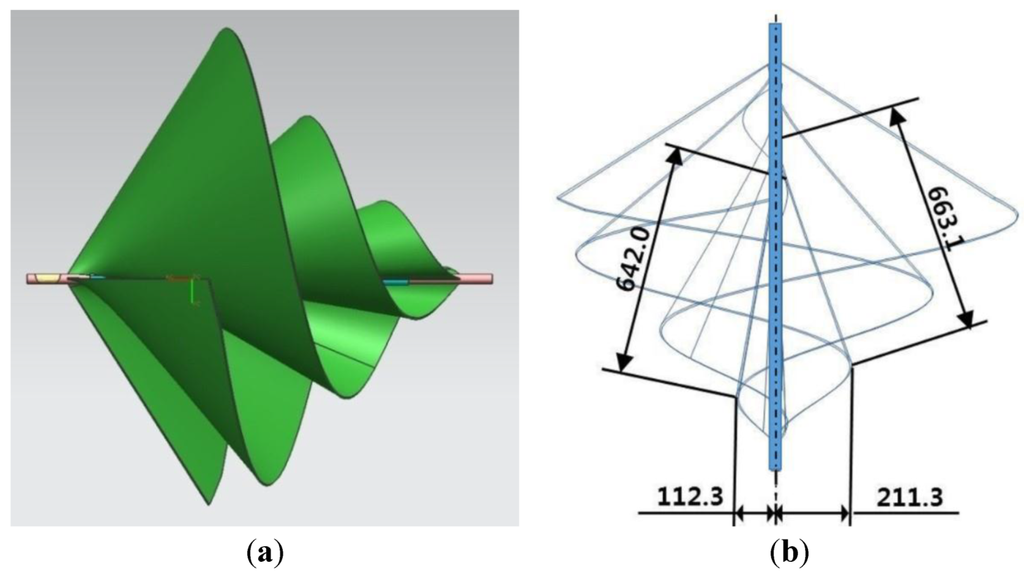
喇叭天线仿真实战:CST环境下的参数调优秘籍
# 摘要
喇叭天线作为无线电频率传输的重要组成部分,在通信系统中发挥着关键作用。本文详细介绍了喇叭天线的理论基础、设计指标以及CST仿真软件的使用技巧。通过探讨喇叭天线的工作原理、主要参数以及应用场景,为读者提供了全面的基础知识。文章进一步阐述了如何在CST环境中搭建仿真环境、设置参数并进行仿真实验
UL1310中文版:电源设计认证流程和文件准备的全面攻略

# 摘要
UL1310电源设计认证是确保电源产品安全性和合规性的关键标准。本文综合概述了UL1310认证的相关内容,包括认证标准与规范的详细解读、认证过程中的关键步骤和安全测试项目。同时,本文还探讨了实战中认证文件的准备方法,成功与失败的案例分析,以及企业如何应对UL1310认证过程中的各种挑战。最后,展望了UL1310认证未来的发展趋势以及企业应如何进行长远规划以适应不断变化的行业标准和市场需求
最小拍控制稳定性分析
# 摘要
本文系统地介绍了最小拍控制的基本原理,稳定性分析的理论基础,以及最小拍控制系统数学模型的构建和求解方法。通过分析系统稳定性的定义和判定方法,结合离散系统模型的特性,本文探讨了最小拍控制系统的建模过程,包括系统响应、误差分析、约束条件以及稳定性的数学关系。进一步,文章讨论了实践应用中控制系统的设计、仿真测试、稳定性改善策略及案例分析。最后,展望了最小拍控制领域未来技术的发展趋势,包括算法优化
【离散系统分析必修课】:掌握单位脉冲响应的5大核心概念
# 摘要
本文系统地阐述了离散系统和单位脉冲响应的基础理论,介绍了离散时间信号处理的数学模型和基本操作,探讨了单位脉冲信号的定义和特性,并深入分析了线性时不变(LTI)系统的特性。进一步地,本文通过理论与实践相结合的方式,探讨了卷积运算、单位脉冲响应的确定方法以及其在实际系统分析中的应用。在深入理解脉冲响应的模拟实验部分,文章介绍了实验环境的搭建、单位脉冲响应的模拟实验和对实验结果的分析对比。本文旨在通过理论分析和实验模拟,加深对脉冲响应及其在系统分析中应用的理解,为系统设计和分析提供参考。
# 关键字
离散系统;单位脉冲响应;离散时间信号;线性时不变;卷积运算;系统稳定性
参考资源链接:
【Simulink模型构建】
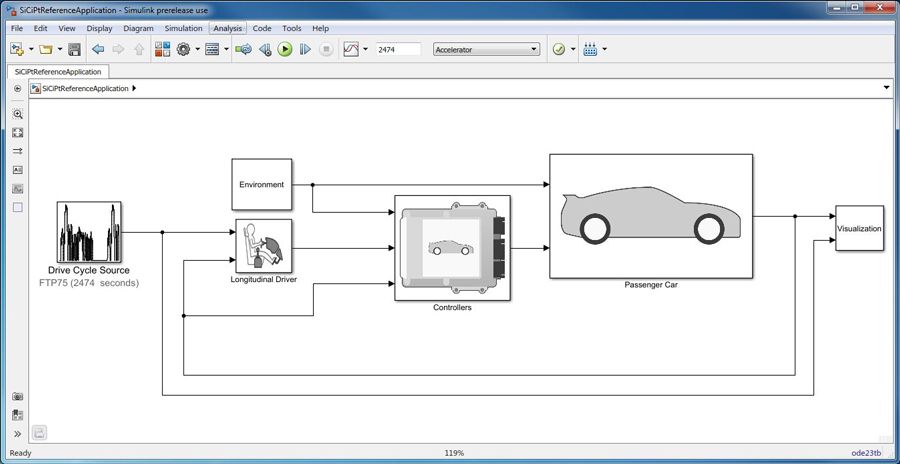
# 摘要
本文系统地介绍了Simulink模型构建的基础知识,深入探讨了信号处理和控制系统的理论与实践,以及多域系统仿真技术。文中详细阐述了Si
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )