MATLAB直线平移:掌握直线平移的技巧和应用
发布时间: 2024-06-08 02:17:00 阅读量: 24 订阅数: 23 
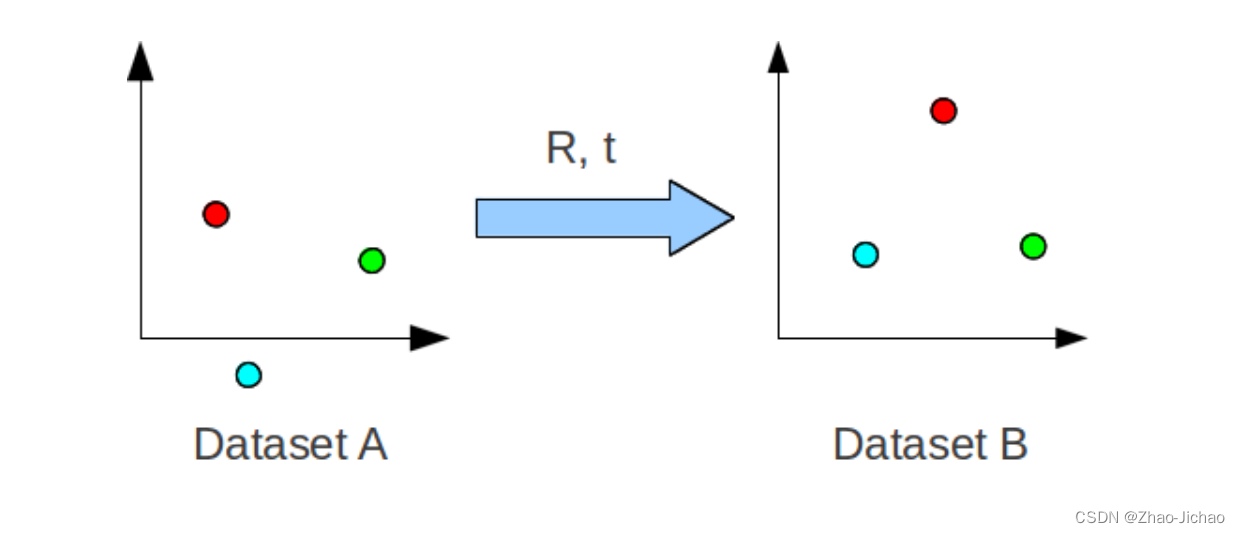
# 1. 直线平移的基本概念和原理**
直线平移是一种几何变换,它将一个图形或物体沿一条直线移动一定的距离,而图形或物体的形状和大小保持不变。在MATLAB中,直线平移可以通过平移矩阵来实现。
平移矩阵是一个2x3或3x4的矩阵,它包含了平移距离的信息。对于2D平移,平移矩阵为:
```
T = [1 0 tx;
0 1 ty;
0 0 1]
```
其中,`tx`和`ty`分别表示沿x轴和y轴的平移距离。对于3D平移,平移矩阵为:
```
T = [1 0 0 tx;
0 1 0 ty;
0 0 1 tz;
0 0 0 1]
```
其中,`tz`表示沿z轴的平移距离。
# 2. 直线平移的数学理论
### 2.1 平移矩阵的定义和性质
#### 2.1.1 平移矩阵的构造
平移矩阵是一个用来表示平移变换的矩阵。它是一个 3x3 的矩阵,其形式如下:
```
T = [1 0 Tx;
0 1 Ty;
0 0 1]
```
其中,`Tx` 和 `Ty` 分别表示沿 x 轴和 y 轴的平移距离。
#### 2.1.2 平移矩阵的运算
平移矩阵具有以下运算性质:
- **单位矩阵:**当 `Tx` 和 `Ty` 都为 0 时,平移矩阵为单位矩阵,表示没有平移。
- **平移相加:**两个平移矩阵相加,得到一个新的平移矩阵,其平移距离等于两个平移距离的和。
- **矩阵乘法:**平移矩阵与点坐标的矩阵乘积,得到平移后的点坐标。
### 2.2 直线平移的几何变换
#### 2.2.1 点的平移
点 `(x, y)` 经过平移矩阵 `T` 平移后,得到新的点 `(x', y')`,其坐标计算公式如下:
```
[x'; y'; 1] = T * [x; y; 1]
```
#### 2.2.2 线段和曲线的平移
线段和曲线由一系列点组成。对线段或曲线上的每个点进行平移,即可得到平移后的线段或曲线。
**代码块:**
```
% 定义平移矩阵
T = [1 0 20;
0 1 10;
0 0 1];
% 定义线段端点坐标
x1 = 10;
y1 = 20;
x2 = 30;
y2 = 40;
% 平移线段
[x1', y1'] = T * [x1; y1; 1];
[x2', y2'] = T * [x2; y2; 1];
% 绘制平移前的和平移后的线段
figure;
plot([x1, x2], [y1, y2], 'b-', 'LineWidth', 2);
hold on;
plot([x1', x2'], [y1', y2'], 'r--', 'LineWidth', 2);
legend('平移前', '平移后');
title('线段平移');
xlabel('x');
ylabel('y');
grid on;
hold off;
```
**代码逻辑分析:**
1. 定义平移矩阵 `T`,其中 `Tx = 20`,`Ty = 10`。
2. 定义线段端点坐标 `(x1, y1)` 和 `(x2, y2)`。
3. 使用平移矩阵 `T` 对线段端点坐标进行平移,得到平移后的端点坐标 `(x1', y1')` 和 `(x2', y2')`。
4. 绘制平移前和平移后的线段,并显示图例和标题。
**参数说明:**
- `T`:平移矩阵
- `x1`, `y1`, `x2`, `y2`:线段端点坐标
- `x1'`, `y1'`, `x2'`, `y2'`:平移后线段端点坐标
# 3. MATLAB中直线平移的实现
### 3.1 平移矩阵的生成
#### 3.1.1 使用`transl`函数
MATLAB提供了`transl`函数来生成平移矩阵。`transl`函数接受一个平移向量`t`作为输入,并返回一个平移矩阵`T`。平移向量`t`是一个包含平移距离的列向量,其形式为`[tx; ty; tz]`,其中`tx`、`ty`和`tz`分别表示沿x、y和z轴的平移距离。
```
% 定义平移向量
t = [2; 3; 1];
% 使用tran
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
该专栏全面深入地探讨了 MATLAB 中直线绘制的方方面面。从入门指南到高级技巧,专栏涵盖了直线参数化方程、拟合、求解、交点、旋转、平移、缩放、颜色、线型、标记、注释、动画、交互式绘图和性能优化等各个方面。专栏中提供了大量的实用技巧和示例代码,帮助读者掌握直线绘制的精髓,提升 MATLAB 绘图技能,并为数据可视化和几何计算提供强大的工具。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python字典常见问题与解决方案:快速解决字典难题
# 1. Python字典简介
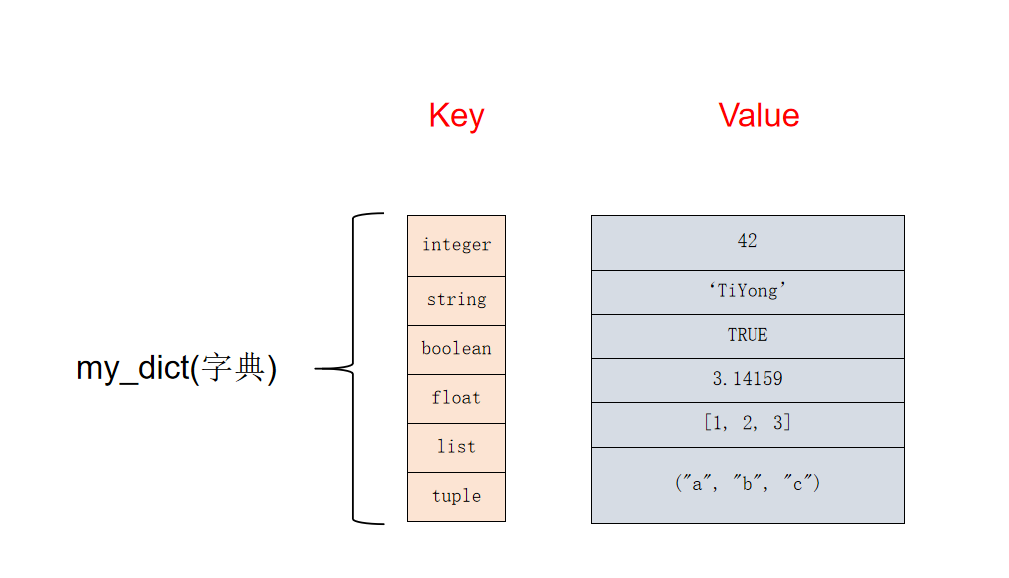
Python字典是一种无序的、可变的键值对集合。它使用键来唯一标识每个值,并且键和值都可以是任何数据类型。字典在Python中广泛用于存储和组织数据,因为它们提供了快速且高效的查找和插入操作。
在Python中,字典使用大括号 `{}` 来表示。键和值由冒号 `:` 分隔,键值对由逗号 `,` 分隔。例如,以下代码创建了一个包含键值对的字典:
```py
【实战演练】构建简单的负载测试工具

# 1. 负载测试基础**
负载测试是一种性能测试,旨在模拟实际用户负载,评估系统在高并发下的表现。它通过向系统施加压力,识别瓶颈并验证系统是否能够满足预期性能需求。负载测试对于确保系统可靠性、可扩展性和用户满意度至关重要。
# 2. 构建负载测试工具
### 2.1 确定测试目标和指标
在构建负载测试工具之前,至关重要的是确定测试目标和指标。这将指导工具的设计和实现。以下是一些需要考虑的关键因素:
OODB数据建模:设计灵活且可扩展的数据库,应对数据变化,游刃有余

# 1. OODB数据建模概述
对象-面向数据库(OODB)数据建模是一种数据建模方法,它将现实世界的实体和关系映射到数据库中。与关系数据建模不同,OODB数据建模将数据表示为对象,这些对象具有属性、方法和引用。这种方法更接近现实世界的表示,从而简化了复杂数据结构的建模。
OODB数据建模提供了几个关键优势,包括:
* **对象标识和引用完整性
Python脚本调用与区块链:探索脚本调用在区块链技术中的潜力,让区块链技术更强大

# 1. Python脚本与区块链简介**
**1.1 Python脚本简介**
Python是一种高级编程语言,以其简洁、易读和广泛的库而闻名。它广泛用于各种领域,包括数据科学、机器学习和Web开发。
**1.2 区块链简介**
区块链是一种分布式账本技术,用于记录交易并防止篡改。它由一系列称为区块的数据块组成,每个区块都包含一组交易和指向前一个区块的哈希值。区块链的去中心化和不可变性使其
Python map函数在代码部署中的利器:自动化流程,提升运维效率

# 1. Python map 函数简介**
map 函数是一个内置的高阶函数,用于将一个函数应用于可迭代对象的每个元素,并返回一个包含转换后元素的新可迭代对象。其语法为:
```python
map(function, iterable)
```
其中,`function` 是要应用的函数,`iterable` 是要遍历的可迭代对象。map 函数通
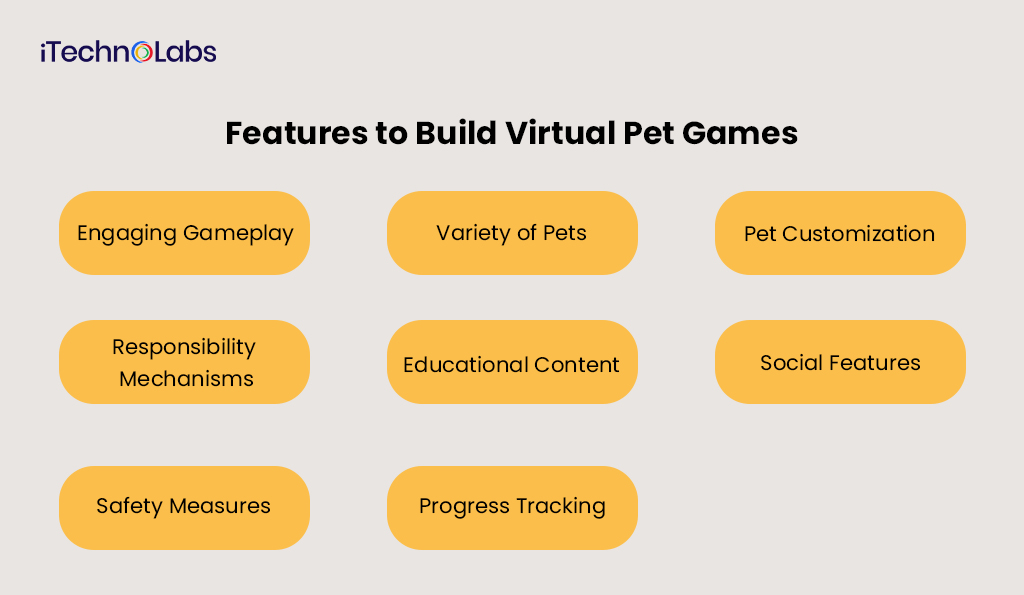
【实战演练】虚拟宠物:开发一个虚拟宠物游戏,重点在于状态管理和交互设计。
# 2.1 虚拟宠物的状态模型
### 2.1.1 宠物的基本属性
虚拟宠物的状态由一系列基本属性决定,这些属性描述了宠物的当前状态,包括:
- **生命值 (HP)**:宠物的健康状况,当 HP 为 0 时,宠物死亡。
- **饥饿值 (Hunger)**:宠物的饥饿程度,当 Hunger 为 0 时,宠物会饿死。
- **口渴
Python列表操作的扩展之道:使用append()函数创建自定义列表类

# 1. Python列表操作基础
Python列表是一种可变有序的数据结构,用于存储同类型元素的集合。列表操作是Py
Python Excel数据分析:统计建模与预测,揭示数据的未来趋势
# 1. Python Excel数据分析概述**
**1.1 Python Excel数据分析的优势**
Python是一种强大的编程语言,具有丰富的库和工具,使其成为Excel数据分析的理想选择。通过使用Python,数据分析人员可以自动化任务、处理大量数据并创建交互式可视化。
**1.2 Python Excel数据分析库**
【进阶】Scikit-Learn:K近邻算法(KNN)
# 1. K近邻算法(KNN)简介**
K近邻算法(KNN)是一种非参数机器学习算法,因其简单易懂、实现方便而被广泛应用。它基于这样的思想:一个样本的类别由其在特征空间中与它最相似的K个样本的类别决定。
KNN算法的原理是:给定一个待分类的样本x,首先计算x与训练集中所有样本的距离,然后选取距离x最近的K个样本,最后根据这K个样本的类别,通过多数投票或加权平均等方式确定x的类别。
# 2. K
【实战演练】综合自动化测试项目:单元测试、功能测试、集成测试、性能测试的综合应用

# 2.1 单元测试框架的选择和使用
单元测试框架是用于编写、执行和报告单元测试的软件库。在选择单元测试框架时,需要考虑以下因素:
* **语言支持:**框架必须支持你正在使用的编程语言。
* **易用性:**框架应该易于学习和使用,以便团队成员可以轻松编写和维护测试用例。
* **功能性:**框架应该提供广泛的功能,包括断言、模拟和存根。
* **报告:**框架应该生成清
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )