状态空间模型的构建:从数据预处理到模型选择的完整指南
发布时间: 2024-07-08 20:42:52 阅读量: 82 订阅数: 35 

# 1. 状态空间模型简介
状态空间模型 (SSM) 是一种数学框架,用于对动态系统进行建模,该系统随时间变化。SSM 由两个方程组成:状态方程和观测方程。状态方程描述了系统状态随时间的演变,而观测方程描述了从系统状态到观测数据的映射。
SSM 在许多领域都有广泛的应用,包括信号处理、控制理论和机器学习。它们特别适用于建模具有隐藏状态的系统,这些状态无法直接观察,但可以通过观测数据进行推断。SSM 的主要优点之一是它们能够处理不确定性和噪声,这在现实世界系统中很常见。
# 2. 数据预处理
### 2.1 数据收集和探索
数据预处理是状态空间建模的关键步骤,旨在将原始数据转换为适合建模的格式。数据收集涉及从各种来源(如传感器、数据库和日志文件)获取相关数据。
**数据探索**
数据探索是了解数据的基本特征、识别异常值和模式的过程。它包括以下步骤:
- **可视化:**使用图表和图形(如直方图、散点图和箱线图)可视化数据,以识别分布、异常值和相关性。
- **统计分析:**计算描述性统计(如均值、中位数、标准差和相关系数),以量化数据的分布和关系。
- **异常值检测:**使用统计技术(如 Grubbs 检验)识别异常值,这些异常值可能对模型拟合产生不利影响。
### 2.2 数据清理和转换
数据清理和转换涉及处理缺失值、异常值和不一致性。
**缺失值处理**
缺失值处理方法包括:
- **删除:**删除具有大量缺失值的记录或特征。
- **插补:**使用统计技术(如均值插补、中位数插补或回归模型)估计缺失值。
- **多重插补:**使用蒙特卡罗方法多次插补缺失值,以创建多个数据集。
**异常值处理**
异常值处理方法包括:
- **删除:**删除极端异常值,这些异常值可能对模型拟合产生不利影响。
- **转换:**使用对数或平方根转换等技术将异常值缩小到正常范围内。
- **Winsorization:**将异常值截断在特定阈值处,以减少其对模型拟合的影响。
**数据转换**
数据转换涉及将数据转换为更适合建模的格式。转换方法包括:
- **标准化:**将数据缩放或中心化,以确保特征具有相同的尺度。
- **离散化:**将连续变量转换为离散类别。
- **哑变量编码:**将分类变量转换为一组二进制特征。
### 2.3 特征工程
特征工程是创建新特征或转换现有特征的过程,以提高模型性能。特征工程技术包括:
- **特征选择:**选择对模型预测最具影响力的特征。
- **特征提取:**使用降维技术(如主成分分析或奇异值分解)创建新的特征。
- **特征变换:**使用数学函数(如对数或平方根)转换现有特征。
**代码块:**
```python
import pandas as pd
import numpy as np
# 数据探索
df = pd.read_csv('data.csv')
df.describe()
df.plot(kind='scatter', x='feature1', y='feature2')
# 数据清理
df.dropna(inplace=True)
df.fillna(df.mean(), inplace=True)
# 数据转换
df['feature1'] = np.log(df['feature1'])
df = pd.get_dummies(df, columns=['categorical_feature'])
# 特征工程
from sklearn.feature_selection import SelectKBest, f_classif
selector = SelectKBest(f_classif, k=10)
selected_features = selector.fit_transform(df.drop('target', axis=1), df['target'])
```
**逻辑分析:**
这段代码执行以下操作:
- 使用 Pandas 读取 CSV 文件并探索数据。
- 使用 Numpy 处理缺失值并进行对数转换。
- 使用 Pandas 进行哑变量编码。
- 使用 Scikit-Learn 进行特征选择。
# 3. 模型选择
### 3.1 线性高斯状态空间模型
线性高斯状态空间模型(LGSSM)是状态空间模型中最简单的一种,它假设系统状态和观测值都服从高斯分布,系统演化和观测过程都是线性的。LGSSM 的状态方程和观测方程如下:
```
x_t = A
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
“状态空间”专栏深入探讨了状态空间方法,这是一种强大的工具,用于分析、建模和控制复杂系统。从理论基础到实际应用,该专栏涵盖了广泛的主题,包括状态空间分析、建模、控制和在各种领域的应用,如强化学习、机器人导航、计算机视觉、自然语言处理、推荐系统、金融建模和工程。通过深入浅出的讲解和丰富的示例,该专栏为读者提供了全面了解状态空间方法,使其能够解锁复杂系统行为,并将其应用于实际问题解决中。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
激活函数理论与实践:从入门到高阶应用的全面教程

# 1. 激活函数的基本概念
在神经网络中,激活函数扮演了至关重要的角色,它们是赋予网络学习能力的关键元素。本章将介绍激活函数的基础知识,为后续章节中对具体激活函数的探讨和应用打下坚实的基础。
## 1.1 激活函数的定义
激活函数是神经网络中用于决定神经元是否被激活的数学函数。通过激活函数,神经网络可以捕捉到输入数据的非线性特征。在多层网络结构
学习率对RNN训练的特殊考虑:循环网络的优化策略
# 1. 循环神经网络(RNN)基础
## 循环神经网络简介
循环神经网络(RNN)是深度学习领域中处理序列数据的模型之一。由于其内部循环结
【实时系统空间效率】:确保即时响应的内存管理技巧

# 1. 实时系统的内存管理概念
在现代的计算技术中,实时系统凭借其对时间敏感性的要求和对确定性的追求,成为了不可或缺的一部分。实时系统在各个领域中发挥着巨大作用,比如航空航天、医疗设备、工业自动化等。实时系统要求事件的处理能够在确定的时间内完成,这就对系统的设计、实现和资源管理提出了独特的挑战,其中最为核心的是内存管理。
内存管理是操作系统的一个基本组成部
【损失函数与随机梯度下降】:探索学习率对损失函数的影响,实现高效模型训练

# 1. 损失函数与随机梯度下降基础
在机器学习中,损失函数和随机梯度下降(SGD)是核心概念,它们共同决定着模型的训练过程和效果。本
【算法竞赛中的复杂度控制】:在有限时间内求解的秘籍
# 1. 算法竞赛中的时间与空间复杂度基础
## 1.1 理解算法的性能指标
在算法竞赛中,时间复杂度和空间复杂度是衡量算法性能的两个基本指标。时间复杂度描述了算法运行时间随输入规模增长的趋势,而空间复杂度则反映了算法执行过程中所需的存储空间大小。理解这两个概念对优化算法性能至关重要。
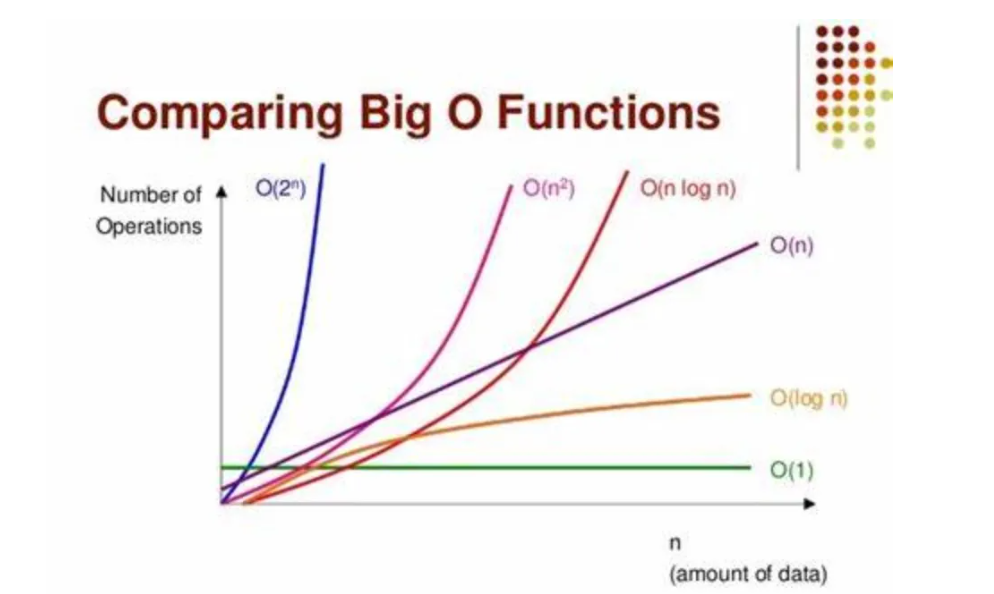
## 1.2 大O表示法的含义与应用
大O表示法是用于描述算法时间复杂度的一种方式。它关注的是算法运行时
极端事件预测:如何构建有效的预测区间
# 1. 极端事件预测概述
极端事件预测是风险管理、城市规划、保险业、金融市场等领域不可或缺的技术。这些事件通常具有突发性和破坏性,例如自然灾害、金融市场崩盘或恐怖袭击等。准确预测这类事件不仅可挽救生命、保护财产,而且对于制定应对策略和减少损失至关重要。因此,研究人员和专业人士持
时间序列分析的置信度应用:预测未来的秘密武器
# 1. 时间序列分析的理论基础
在数据科学和统计学中,时间序列分析是研究按照时间顺序排列的数据点集合的过程。通过对时间序列数据的分析,我们可以提取出有价值的信息,揭示数据随时间变化的规律,从而为预测未来趋势和做出决策提供依据。
## 时间序列的定义
时间序列(Time Series)是一个按照时间顺序排列的观测值序列。这些观测值通常是一个变量在连续时间点的测量结果,可以是每秒的温度记录,每日的股票价
Epochs调优的自动化方法
# 1. Epochs在机器学习中的重要性
机器学习是一门通过算法来让计算机系统从数据中学习并进行预测和决策的科学。在这一过程中,模型训练是核心步骤之一,而Epochs(迭代周期)是决定模型训练效率和效果的关键参数。理解Epochs的重要性,对于开发高效、准确的机器学习模型至关重要。
在后续章节中,我们将深入探讨Epochs的概念、如何选择合适值以及影响调优的因素,以及如何通过自动化方法和工具来优化Epochs的设置,从而
【批量大小与存储引擎】:不同数据库引擎下的优化考量

# 1. 数据库批量操作的理论基础
数据库是现代信息系统的核心组件,而批量操作作为提升数据库性能的重要手段,对于IT专业人员来说是不可或缺的技能。理解批量操作的理论基础,有助于我们更好地掌握其实践应用,并优化性能。
## 1.1 批量操作的定义和重要性
批量操作是指在数据库管理中,一次性执行多个数据操作命
机器学习性能评估:时间复杂度在模型训练与预测中的重要性
# 1. 机器学习性能评估概述
## 1.1 机器学习的性能评估重要性
机器学习的性能评估是验证模型效果的关键步骤。它不仅帮助我们了解模型在未知数据上的表现,而且对于模型的优化和改进也至关重要。准确的评估可以确保模型的泛化能力,避免过拟合或欠拟合的问题。
## 1.2 性能评估指标的选择
选择正确的性能评估指标对于不同类型的机器学习任务至关重要。例如,在分类任务中常用的指标有
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )