集成学习在自动驾驶中的应用:环境感知、路径规划与决策制定(自动驾驶核心技术)
发布时间: 2024-08-21 21:48:50 阅读量: 38 订阅数: 37 
# 1. 集成学习概述**
集成学习是一种机器学习技术,它通过组合多个基学习器(如决策树、支持向量机)来增强预测性能。集成学习背后的基本思想是,通过结合多个基学习器的预测,可以获得比任何单个基学习器更好的泛化性能。
集成学习的优点包括:
* **降低方差:**集成学习可以降低基学习器的方差,从而提高预测的稳定性。
* **提高鲁棒性:**集成学习可以提高基学习器的鲁棒性,使其对异常值和噪声数据不那么敏感。
* **增强预测能力:**集成学习可以增强基学习器的预测能力,使其能够处理更复杂的任务。
# 2. 集成学习在环境感知中的应用
### 2.1 传感器融合与数据预处理
#### 2.1.1 传感器融合技术
传感器融合是将来自多个传感器的数据进行融合,以获得更准确和全面的环境感知信息。常用的传感器融合技术包括:
- **卡尔曼滤波:**一种递归估计算法,用于估计动态系统的状态。它通过预测和更新两个步骤来融合传感器数据。
- **粒子滤波:**一种基于蒙特卡罗采样的算法,用于估计非线性动态系统的状态。它通过生成一组粒子(样本)并根据传感器数据对其进行加权和重新采样来实现。
- **贝叶斯滤波:**一种基于贝叶斯定理的算法,用于估计动态系统的状态。它通过更新后验概率分布来融合传感器数据。
#### 2.1.2 数据预处理方法
数据预处理是将原始传感器数据转换为可用于集成学习模型的格式的过程。常用的数据预处理方法包括:
- **数据归一化:**将数据缩放到一个特定的范围,以消除不同传感器数据之间的差异。
- **数据平滑:**使用滤波器或其他技术去除传感器数据中的噪声和异常值。
- **特征提取:**从原始数据中提取有意义的特征,以提高集成学习模型的性能。
### 2.2 目标检测与识别
#### 2.2.1 目标检测算法
目标检测算法用于识别图像或视频中的对象。常用的目标检测算法包括:
- **YOLO(You Only Look Once):**一种单次卷积神经网络,用于实时目标检测。它将图像划分为网格,并为每个网格预测目标的位置和类别。
- **Faster R-CNN(Faster Region-based Convolutional Neural Network):**一种基于区域建议网络(RPN)的目标检测算法。它生成候选区域,然后使用卷积神经网络对这些区域进行分类和回归。
- **Mask R-CNN(Mask Region-based Convolutional Neural Network):**一种基于Faster R-CNN的目标检测算法,用于生成目标的分割掩码。
#### 2.2.2 目标识别算法
目标识别算法用于识别已检测到的目标的类别。常用的目标识别算法包括:
- **支持向量机(SVM):**一种二分类算法,用于将目标分类到不同的类别。
- **随机森林:**一种集成学习算法,用于通过组合多个决策树来提高分类准确性。
- **卷积神经网络(CNN):**一种深度学习算法,用于从图像中提取特征并进行分类。
# 3. 集成学习在路径规划中的应用
### 3.1 路径规划算法
#### 3.1.1 传统路径规划算法
**Dijkstra算法:**
- Dijkstra算法是一种基于贪心策略的单源最短路径算

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《集成学习策略与实践》专栏深入探讨了集成学习的理论、算法和应用场景。它提供了从理论到实战的全面指南,帮助读者打造高性能机器学习模型。专栏涵盖了集成学习在各个领域的广泛应用,包括计算机视觉、金融、医疗保健、推荐系统、异常检测、强化学习、边缘计算、物联网、工业 4.0、自动驾驶、网络安全和生物信息学。通过深入的分析和实际案例,该专栏旨在帮助读者掌握集成学习的奥秘,并将其应用于各种现实世界问题。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【品牌化的可视化效果】:Seaborn样式管理的艺术

# 1. Seaborn概述与数据可视化基础
## 1.1 Seaborn的诞生与重要性
Seaborn是一个基于Python的统计绘图库,它提供了一个高级接口来绘制吸引人的和信息丰富的统计图形。与Matplotlib等绘图库相比,Seaborn在很多方面提供了更为简洁的API,尤其是在绘制具有多个变量的图表时,通过引入额外的主题和调色板功能,大大简化了绘图的过程。Seaborn在数据科学领域得
Keras注意力机制:构建理解复杂数据的强大模型
# 1. 注意力机制在深度学习中的作用
## 1.1 理解深度学习中的注意力
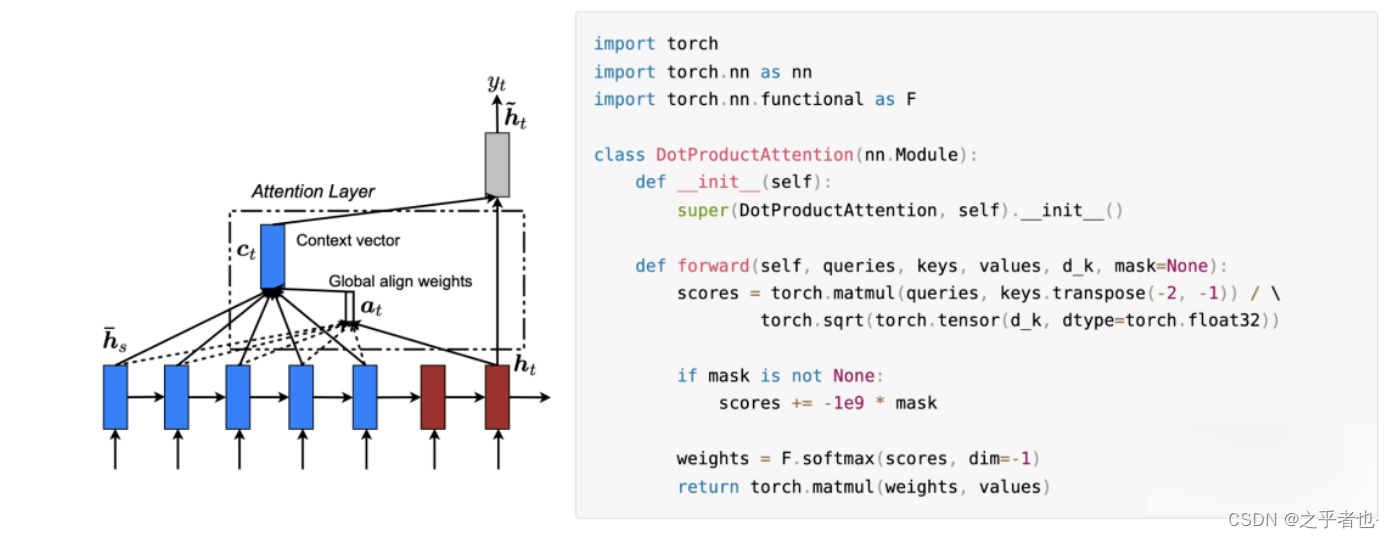
深度学习通过模仿人脑的信息处理机制,已经取得了巨大的成功。然而,传统深度学习模型在处理长序列数据时常常遇到挑战,如长距离依赖问题和计算资源消耗。注意力机制的提出为解决这些问题提供了一种创新的方法。通过模仿人类的注意力集中过程,这种机制允许模型在处理信息时,更加聚焦于相关数据,从而提高学习效率和准确性。
## 1.2
Pandas数据转换:重塑、融合与数据转换技巧秘籍
# 1. Pandas数据转换基础
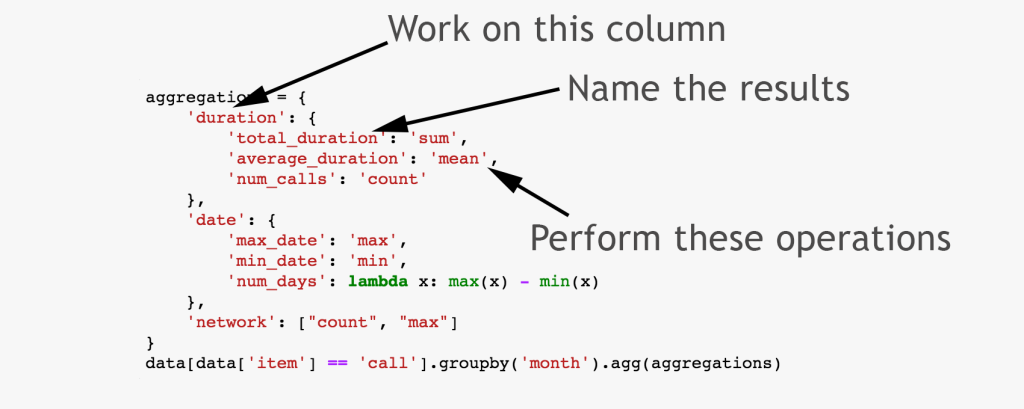
在这一章节中,我们将介绍Pandas库中数据转换的基础知识,为读者搭建理解后续章节内容的基础。首先,我们将快速回顾Pandas库的重要性以及它在数据分析中的核心地位。接下来,我们将探讨数据转换的基本概念,包括数据的筛选、清洗、聚合等操作。然后,逐步深入到不同数据转换场景,对每种操作的实际意义进行详细解读,以及它们如何影响数
数据清洗的概率分布理解:数据背后的分布特性

# 1. 数据清洗的概述和重要性
数据清洗是数据预处理的一个关键环节,它直接关系到数据分析和挖掘的准确性和有效性。在大数据时代,数据清洗的地位尤为重要,因为数据量巨大且复杂性高,清洗过程的优劣可以显著影响最终结果的质量。
## 1.1 数据清洗的目的
数据清洗
NumPy在金融数据分析中的应用:风险模型与预测技术的6大秘籍

# 1. NumPy基础与金融数据处理
金融数据处理是金融分析的核心,而NumPy作为一个强大的科学计算库,在金融数据处理中扮演着不可或缺的角色。本章首先介绍NumPy的基础知识,然后探讨其在金融数据处理中的应用。
## 1.1 NumPy基础
NumPy(N
正态分布与非参数统计:探索替代方法的实用指南

# 1. 正态分布的基本原理及其重要性
## 1.1 正态分布定义
正态分布,也称为高斯分布,是一种在自然科学和社会科学领域广泛出现的概率分布。其特点是对称地围绕均值分布,形状呈现为钟形。具体数学表达为两个参数:均值(μ)和标准差(σ)。
## 1.2 正态分布的重要性
为何正态分布在统计学和数据分析中至关重要?首先,许多
PyTorch超参数调优:专家的5步调优指南
# 1. PyTorch超参数调优基础概念
## 1.1 什么是超参数?
在深度学习中,超参数是模型训练前需要设定的参数,它们控制学习过程并影响模型的性能。与模型参数(如权重和偏置)不同,超参数不会在训练过程中自动更新,而是需要我们根据经验或者通过调优来确定它们的最优值。
## 1.2 为什么要进行超参数调优?
超参数的选择直接影响模型的学习效率和最终的性能。在没有经过优化的默认值下训练模型可能会导致以下问题:
- **过拟合**:模型在
从Python脚本到交互式图表:Matplotlib的应用案例,让数据生动起来

# 1. Matplotlib的安装与基础配置
在这一章中,我们将首先讨论如何安装Matplotlib,这是一个广泛使用的Python绘图库,它是数据可视化项目中的一个核心工具。我们将介绍适用于各种操作系统的安装方法,并确保读者可以无痛地开始使用Matplotlib
【数据集加载与分析】:Scikit-learn内置数据集探索指南

# 1. Scikit-learn数据集简介
数据科学的核心是数据,而高效地处理和分析数据离不开合适的工具和数据集。Scikit-learn,一个广泛应用于Python语言的开源机器学习库,不仅提供了一整套机器学习算法,还内置了多种数据集,为数据科学家进行数据探索和模型验证提供了极大的便利。本章将首先介绍Scikit-learn数据集的基础知识,包括它的起源、
【循环神经网络】:TensorFlow中RNN、LSTM和GRU的实现

# 1. 循环神经网络(RNN)基础
在当今的人工智能领域,循环神经网络(RNN)是处理序列数据的核心技术之一。与传统的全连接网络和卷积网络不同,RNN通过其独特的循环结构,能够处理并记忆序列化信息,这使得它在时间序列分析、语音识别、自然语言处理等多
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )