机器人运动学基础及关键概念解析
发布时间: 2024-02-28 20:37:20 阅读量: 114 订阅数: 48 

机器人运动学分析
# 1. 介绍机器人运动学
机器人运动学是研究机器人在空间中运动姿态和轨迹规划的学科。通过对机器人的结构和运动规律进行建模分析,可以帮助我们更好地理解和控制机器人的运动行为。
## 1.1 什么是机器人运动学
机器人运动学是研究机器人如何在空间中移动和定位的学科。通常包括机器人的结构、坐标系、轨迹规划等内容。在机器人领域中,运动学是一个非常基础且重要的概念,它关注的是机器人的位置、速度和加速度等运动相关的参数。
## 1.2 机器人运动学的应用领域
机器人运动学的研究成果被广泛应用于工业生产中的自动化装配线、智能仓储系统、无人驾驶车辆等领域。通过运动学分析,可以帮助对机器人进行路径规划、动作控制,提高机器人的工作效率和精度。
## 1.3 机器人运动学的重要性
在机器人领域中,运动学是至关重要的。通过对机器人的运动学分析,可以实现对机器人的精准控制,使机器人在各种复杂环境下做出合适的动作反应,提高机器人的智能水平和实际应用价值。同时,深入了解机器人运动学还能够为机器人的设计和优化提供理论支持。
希望以上内容可以帮助您对机器人运动学有一个初步的了解,接下来我们将深入探讨机器人运动学的基本概念。
# 2. 机器人运动学的基本概念
### 2.1 关节和连杆
在机器人运动学中,关节是连接相邻连杆的旋转或平移连接点,决定了机器人的可动性。而连杆则是连接各个关节的刚性物体,在机器人的运动中扮演着重要的角色。
### 2.2 坐标系及其转换
在机器人运动学中,坐标系被用来描述物体的位置和姿态。通过坐标系的转换,可以实现物体在不同参考系下的描述和计算,是机器人运动学中的基本概念之一。
### 2.3 位姿和姿态
位姿描述了物体的位置和姿态,包括位置信息和方向信息。姿态则是描述物体朝向的属性,是机器人运动学中非常重要的概念。
### 2.4 自由度和约束
机器人的自由度代表了机器人可以独立控制的运动参数数量,而约束则是限制机器人运动的条件。理解自由度和约束对于机器人运动学分析至关重要。
# 3. 机器人运动学正运动学分析
在机器人运动学中,正运动学分析是指通过已知机器人关节的位置、速度和加速度等信息,来计算末端执行器的位置、速度和加速度。这一过程需要通过逐步的数学推导和计算,涉及到坐标变换、雅可比矩阵等概念。
#### 3.1 位置正解
位置正解是指根据机器人各个关节的位置,利用正运动学方程计算末端执行器的位置。这个过程通常会涉及到坐标系的转换和连杆的运动学模型。
```python
# 位置正解示例代码(Python)
import numpy as np
# 假设机器人有3个关节,关节角度分别为 30°, 45°, 60°
joint_angles = [30, 45, 60]
# 运动学模型参数
# ... (省略机器人参数的定义)
# 计算末端执行器的位置
def forward_kinematics(joint_angles, ...):
# ... (根据运动学模型,进行位置正解的计算)
end_effector_position = np.array([...])
return end_effector_position
# 输出末端执行器的位置
print("末端执行器的位置:", forward_kinematics(joint_angles, ...))
```
#### 3.2 速度正解
速度正解是指根据机器人各个关节的速度,利用雅可比矩阵和关节速度计算末端执行器的速度。通过雅可比矩阵的求解,可以将关节空间的速度转换为末端执行器的速度。
```java
// 速度正解示例代码(Java)
// 假设机器人有3个关节,关节速度分别为 10 rad/s, 5 rad/s, 3 rad/s
double[] joint_velocities = {10, 5, 3};
// 雅可比矩阵的计算
// ... (省略雅可比矩阵计算的过程)
// 计算末端执行器的速度
public double[] velocity_forward_kinematics(double[] joint_velocities, ...) {
// ... (根据雅可比矩阵的计算,进行速度正解的计算)
double[] end_effector_velocity = {...};
return end_effector_velocity;
}
// 输出末端执行器的速度
System.out.println("末端执行器的速度:" + velocity_forward_kinematics(joint_velocities, ...));
```
#### 3.3 加速度正解
加速度正解是指根据机器人各个关节的加速度,利用雅可比矩阵和关节加速度计算末端执行器的加速度。通过雅可比矩阵的导数,可以将关节空间的加速度转换为末端执行器的加速度。
```javascript
// 加速度正解示例代码(JavaScript)
// 假设机器人有3个关节,关节加速度分别为 2 rad/s^2, 1 rad/s^2, 0.5 rad/s^2
let joint_accelerations = [2, 1, 0.5];
// 雅可比矩阵的导数计算
// ... (省略雅可比矩阵导数计算的过程)
// 计算末端执行器的加速度
function acceleration_forward_kinematics(joint_accelerations, ...) {
// ... (根据雅可比矩阵的导数,进行加速度正解的计算)
let end_effector_acceleration = [...];
return end_effector_acceleration;
}
// 输出末端执行器的加速度
console.log("末端执行器的加速度:" + acceleration_forward_kinematics(joint_accelerations, ...));
```
#### 3.4 正运动学解析方法
正运动学的解析方法通常涉及到坐标系变换、连杆运动学模型以及雅可比矩阵等数学概念的运用。这些方法需要根据具体的机器人类型和结构进行相应的推导和计算,以得到机器人末端执行器的位置、速度和加速度等信息。
正运动学的解析方法对于机器人控制和运动规划是至关重要的,能够帮助机器人系统有效地实现运动控制、轨迹规划等任务,从而广泛应用于工业制造、智能交通、医疗服务等领域。
# 4. 机器人运动学逆运动学分析
在机器人运动学中,逆运动学分析是指根据机器人末端执行器(末端执行器通常是机器人手臂的末端,比如机器人手抓取工具)的期望位置、姿态等信息,来计算机器人关节的运动状态,以实现达到期望位置和姿态的运动控制。逆运动学分析在工业自动化、机器人路径规划以及姿态控制等领域具有重要的应用价值。
#### 4.1 位置逆解
在机器人运动学中,位置逆解是指根据机器人末端执行器的期望位置信息,来计算机器人各关节的角度或长度等参数。这个过程涉及到数学建模、求解方程组等复杂计算。
#### 4.2 速度逆解
速度逆解是指根据机器人末端执行器的期望速度信息,来计算机器人各关节的速度状态,以实现平滑运动控制。速度逆解通常需要考虑到机器人运动学模型的雅可比矩阵等相关知识。
#### 4.3 加速度逆解
加速度逆解是在速度逆解的基础上,进一步考虑机器人末端执行器的期望加速度信息,来计算机器人各关节的加速度状态,以实现更加精细的运动控制。
#### 4.4 逆运动学解析方法
逆运动学解析方法包括了各种求解位置、速度、加速度逆解的数学建模和求解技术,比如数值求解、解析求解、迭代求解等方法。不同的机器人模型以及运动控制需求,可能会采用不同的逆运动学解析方法。
在实际工程中,逆运动学分析常常是机器人运动控制中的核心问题之一,其复杂度和计算量需要根据具体的机器人模型和应用场景来进行合理的选择和优化。
# 5. 关键概念解析
在机器人运动学中,有一些关键概念对于理解和控制机器人的运动至关重要。本章将重点介绍其中的四个关键概念:转动矩阵、雅可比矩阵、位姿控制和碰撞检测。
### 5.1 关键概念1:转动矩阵
转动矩阵是描述刚体旋转的一个重要工具,通常用一个3x3的矩阵表示。在机器人运动学中,转动矩阵可以帮助我们计算物体在不同坐标系下的姿态描述,以及在坐标系之间的转换。其数学表示如下:
```
R = [[cosθ, -sinθ, 0],
[sinθ, cosθ, 0],
[0, 0, 1]]
```
### 5.2 关键概念2:雅可比矩阵
雅可比矩阵是描述系统的位置与速度之间关系的重要工具,在机器人运动学中起着至关重要的作用。雅可比矩阵可以帮助我们分析机器人末端执行器的运动特性,并进行运动规划和控制。其数学表示如下:
```
J = ∂f/∂q
```
### 5.3 关键概念3:位姿控制
位姿控制是指通过对机器人的关节控制,实现机器人末端执行器的特定位置和姿态。在机器人运动学中,位姿控制是一个重要的研究领域,涉及到控制算法的设计和实现。常见的位姿控制方法包括PID控制、轨迹规划等。
### 5.4 关键概念4:碰撞检测
碰撞检测是指在机器人工作过程中,通过检测机器人的各个部件是否与环境中的障碍物发生碰撞,从而避免潜在的安全问题。在机器人运动学中,碰撞检测是一个至关重要的任务,需要高效的算法来实现。常见的碰撞检测方法包括包围盒碰撞检测、几何体碰撞检测等。
通过深入理解和掌握这些关键概念,我们可以更好地应用机器人运动学知识,实现机器人的精准运动和智能控制。
# 6. 未来展望与发展趋势
机器人运动学作为机器人学科中重要的分支之一,在智能制造和自动化领域扮演着至关重要的角色。随着科技的不断进步和人工智能技术的快速发展,机器人运动学领域也面临着许多新的挑战和机遇。
### 6.1 机器人运动学在智能制造中的应用
随着工业4.0的到来,机器人在智能制造中扮演着越来越重要的角色。机器人运动学的研究不仅可以帮助我们设计更高效的生产线,提高生产效率,还可以实现更复杂的操作任务,如装配、焊接、搬运等。通过深入研究机器人运动学,我们可以更好地控制机器人的运动,提高生产线的灵活性和自适应性,从而实现智能制造的目标。
### 6.2 机器人运动学发展的挑战与机遇
机器人运动学领域虽然取得了许多成果,但仍然面临着挑战。例如,如何实现复杂任务的路径规划和障碍物避让、如何在不确定环境下实现精准定位等问题仍需要深入研究。同时,随着深度学习和强化学习等人工智能技术的发展,机器人运动学也有了更多的机遇。这些技术的应用可以使机器人更加智能化,更加适应各种复杂环境和任务。
### 6.3 未来机器人运动学研究的方向
未来,机器人运动学的研究方向可能会集中在以下几个方面:
- 智能化控制:借助人工智能技术,使机器人能够更好地适应复杂环境和任务,实现智能化控制。
- 协作与协调:研究机器人之间的协作与协调,实现多机器人系统的高效协作。
- 柔性操作:研究如何使机器人实现更柔性的操作,如实现精细装配、柔性搬运等任务。
总的来说,机器人运动学作为机器人学科中重要的研究领域,将继续在未来发挥重要作用,并为实现智能制造和自动化提供更多可能性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
ICM-20948数据手册深度剖析:掌握9轴运动传感器技术细节

参考资源链接:[ICM-20948:9轴MEMS运动追踪设备手册](https://wenku.csdn.net/doc/6412b724be7fbd1778d493ed?spm=1055.2635.3001.10343)
# 1. ICM-20948 9轴运动传感器概述
在当今的智能设备中,运动传感器已经成为不可或缺的一部分,
B-66284EN PICTURE图形化编程:2小时掌握提高效率的秘诀
参考资源链接:[FANUC PICTURE中文操作手册:安全与详尽指南](https://wenku.csdn.net/doc/103s4j8sbv?spm=1055.2635.3001.10343)
# 1. B-66284EN PICTURE图形化编程入门
## 1.1 B-66284EN PICTURE简介
B-66284EN PICTURE是一种图形化编程语言
GMW3172深度剖析:汽车材料与零件性能的终极要求
参考资源链接:[GMW3172_Handbook_Version_19.pdf](https://wenku.csdn.net/doc/6401acf0cce7214c316edb16?spm=1055.2635.3001.10343)
# 1. 汽车材料与零件性能的基本概念
汽车制造业是人类技术进步的重要体现,而材料与零件的性能则是确保汽车安全、效率与舒适性的基础。本章旨在介绍汽车材料与零件性能的基本概念,为后续章节关于性能分析、测试方法、影响因素以及优化策略的深入探讨奠定基础。
汽车材料通常指用于汽车制造的各种金属、合金、塑料、复合材料等,它们需满足特定的机械性能、物理性能和化学性能,
【VMware软件安装步骤详解】:新手也能轻松驾驭的安装向导

参考资源链接:[ThinkPad VMware:Intel VT-x禁用问题及解决步骤](https://wenku.csdn.net/doc/6uhie
【云计算终极指南】
参考资源链接:[郑州十校2021-2022学年高二期中物理试题分析](https://wenku.csdn.net/doc/2pkvprcr8x?spm=1055.2635.3001.10343)
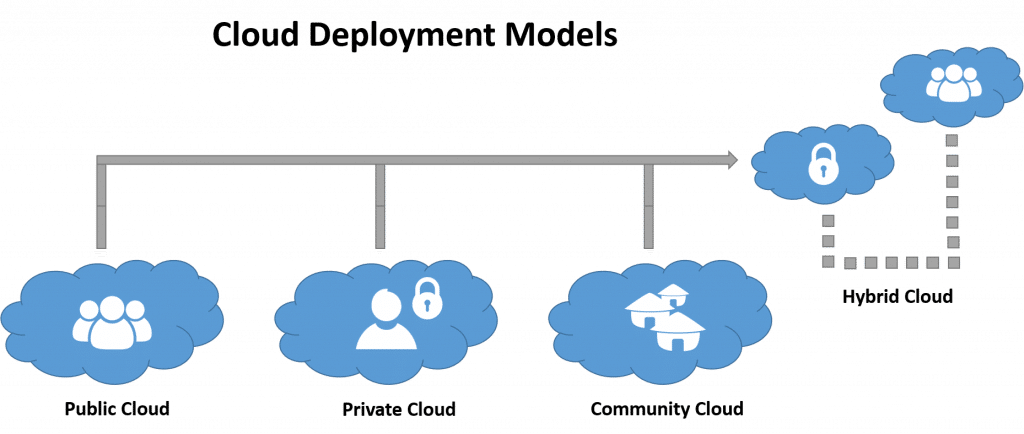
# 1. 云计算的概念与架构
云计算是一种基于互联网的计算模式,它通过互联网提供便捷、可配置的计算资源(如网络、服务器、存储、应用程序和资源)。这一模式使得计算资源能够
SoftMove云服务优化:云集成与性能调优的终极指南
参考资源链接:[ABB机器人SoftMove中文应用手册](https://wenku.csdn.net/doc/1v1odu86mu?spm=1055.2635.3001.10343)
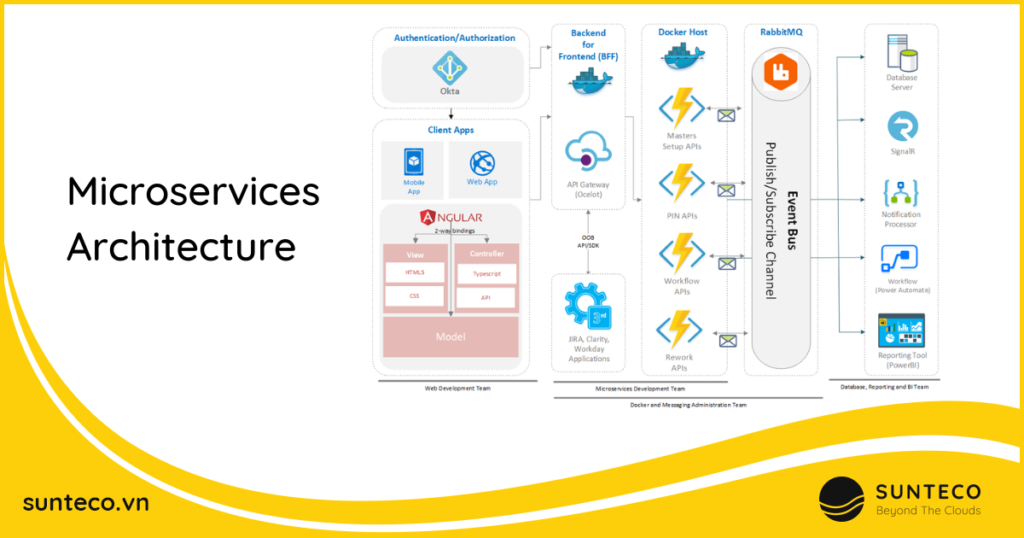
# 1. SoftMove云服务架构概述
## 1.1 云服务架构定义
SoftMove云服务架构是一个
揭秘VGA时序标准:从电子到图像的转换机制
参考资源链接:[VESA全解析:VGA时序标准指南及行业常用显示参数](https://wenku.csdn.net/doc/1n5nv9qcym?spm=1055.2635.3001.10343)
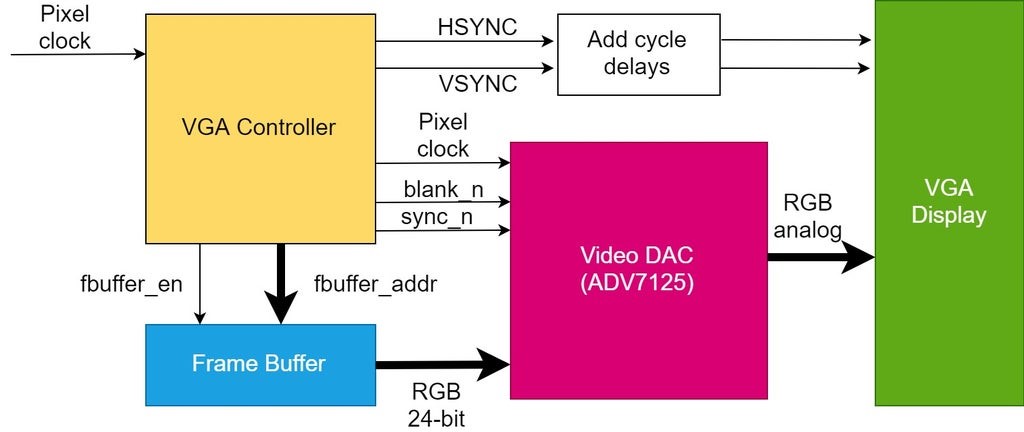
# 1. VGA技术与图像显示基础
## 1.1 VGA技术简介
VGA(Video Graphics Array,视频图形阵列)是一种模拟电脑显示标准,于1987年由IBM公司推出。它的最大优势在于广泛的硬件兼容性和丰富的颜色表现。VGA支持最多256种颜色的图
【高斯分布到Isserlis' Theorem】:统计学关键链接的详细解读
参考资源链接:[Isserlis定理:多元正态分布任意阶混合矩的通用公式证明](https://wenku.csdn.net/doc/6tpi5kvhfa?spm=1055.2635.3001.10343)
# 1. 高斯分布的数学基础
在统计学和概率论中,高斯分布,也被称为正态分布,是最为常见且广泛研究的连续概率分布。其数学基础在很大程度上
UCINET 6实战演练:社区检测技术的详尽解读

参考资源链接:[UCINET 6 for Windows中文手册:详解与资源指南](https://wenku.csdn.net/doc/7enj0faejo?spm=1055.2635.3001.10343)
# 1. UCINET 6简介与社区检测概述
社区检测是复杂网络分析的重要环节,其目标在于识别网络中的群体结构,这些群体内的节点相互连接紧密,而群体间连接相对稀疏。UCINET(University of Calif
深入浅出Gel-PRO ANALYZER:软件界面与功能详解

参考资源链接:[Gel-PRO ANALYZER软件:凝胶定量分析完全指南](https://wenku.csdn.net/doc/15xjsnno5m?spm=1055.2635.3001.10343)
# 1. Gel-PRO ANALYZER软件概述
Gel-PRO ANALYZER是一款专业的凝胶图像分析软件,广泛应用于分子生物学领域。它能对蛋白质、DNA、R
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录

文章持续更新中,敬请期待~
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )