L298N驱动模块特性及原理解析
发布时间: 2024-04-07 00:33:23 阅读量: 905 订阅数: 79 
# 1. L298N驱动模块简介
## 1.1 L298N驱动模块概述
L298N驱动模块是一种常用的电机驱动模块,可用于控制直流电机或步进电机。它采用了经典的H桥驱动电路设计,提供了双路驱动能力,具有较强的驱动能力和稳定性。
## 1.2 L298N驱动模块的应用领域
L298N驱动模块广泛应用于机器人、智能小车、医疗设备、工业自动化等领域的电机控制系统中,是实现电机正反转、速度控制等功能的重要组成部分。
## 1.3 L298N驱动模块的特点与优势
- 双路H桥驱动,可同时驱动两路直流电机
- 内置自动电流限制保护功能,提高了系统的稳定性
- 采用大功率MOS管输出,具有较强的驱动能力和响应速度
- 良好的散热性能,适用于长时间高负载工作场景
L298N驱动模块以其稳定可靠的性能和灵活多样的应用场景,受到了广泛的关注和应用。
# 2. L298N驱动模块原理解析
L298N驱动模块是一种常用的电机驱动模块,能够有效控制直流电机的转速和方向。在本章中,我们将深入探讨L298N驱动模块的工作原理、内部结构分析以及电路原理解析。
### 2.1 L298N驱动模块的工作原理
L298N驱动模块主要通过控制输入信号来实现控制电机的转向和转速。具体来说,L298N驱动模块内部包含了H桥电路,通过控制H桥上的四个开关管的导通和截止来控制电机的正反转和制动。当不同的开关管组合导通时,电机会产生相应的转向和转速。
### 2.2 L298N驱动模块的内部结构分析
L298N驱动模块内部结构复杂,包括功率输出级、逻辑控制级以及电流检测级等部分。功率输出级主要由四个功率晶体管组成,用于控制电机的输出;逻辑控制级则处理外部输入信号,控制功率晶体管的导通和截止;电流检测级用于监测电机的电流情况,保护电路安全。
### 2.3 L298N驱动模块的电路原理解析
L298N驱动模块的电路原理主要围绕着H桥电路展开。通过对四个开关管的控制,可以实现电机的正反转和制动。此外,L298N驱动模块还包含了电压调节电路、过流保护电路等功能模块,保证了电路的稳定运行和电机的安全使用。
通过以上对L298N驱动模块的原理解析,我们可以更好地理解其工作方式和内部结构,为后续的应用和调试工作奠定基础。
# 3. L298N驱动模块接口与引脚功能
L298N驱动模块在实际应用中,其引脚的定义和功能显得尤为重要。接下来将详细介绍L298N驱动模块的接口与引脚功能。
#### 3.1 L298N驱动模块的引脚定义
L298N驱动模块共有15个引脚,这些引脚分配了不同的功能,如下所示:
- **引脚1(EN1)和引脚2(EN2)**:使能端,用于控制电机的启停,连接PWM信号进行电机速度调节。
- **引脚3(OUT1)、引脚4(OUT2)、引脚5(OUT3)、引脚6(OUT4)**:电机输出端,连接电机两端的导线。
- **引脚7(VCC1)和引脚8(VCC2)**:电源输入端,接入外部电源。
- **引脚9(VS)**:芯片电源,接入控制芯片的电源。
- **引脚10(GND1)和引脚11(GND2)**:地电平,接入电源负极。
- **引脚12(IN1)、引脚13(IN2)、引脚14(IN3)、引脚15(IN4)**:控制输入端,用于控制电机的转向。
#### 3.2 L298N驱动模块的电源接口分析
- **VCC1和VCC2**:这两个引脚连接外部电源,在电机工作时需要提供足够的电流。
- **VS**:连接控制芯片的电源,一般情况下与VCC1相连。
#### 3.3 L298N驱动模块的控制接口功能介绍
- **IN1~IN4**:通过控制这四个引脚的高低电平状态,可以控制电机的正转、反转以及制动。
- **EN1和EN2**:通过调节PWM信号的占空比,可以实现对电机速度的控制。
以上是关于L298N驱动模块的接口与引脚功能的详细介绍。在实际应用中,正确使用和连接这些引脚将帮助您更好地控制电机和系统。
# 4. L298N驱动模块应用案例
L298N驱动模块作为一种常用的电机驱动模块,在各种电子设备中有着广泛的应用。下面将介绍一些L298N驱动模块在不同领域的应用案例。
#### 4.1 L298N驱动模块在电机控制中的应用
在机器人、小车、船舶等项目中,通常需要使用电机进行驱动,而L298N驱动模块可以提供双路直流电机的驱动功能。通过控制L298N模块的输入信号,可以实现电机正转、反转、速度调节等功能。下面是一个简单的基于Arduino和L298N的小车控制代码示例:
```python
# 导入Arduino库
from pyfirmata import Arduino, util
import time
# 配置串口
port = 'COM3'
board = Arduino(port)
it = util.Iterator(board)
it.start()
# 配置引脚
enableA = 3
in1 = 10
in2 = 9
enableB = 6
in3 = 8
in4 = 7
# 控制小车前进函数
def forward():
board.digital[in1].write(1)
board.digital[in2].write(0)
board.digital[enableA].write(255)
board.digital[in3].write(1)
board.digital[in4].write(0)
board.digital[enableB].write(255)
# 控制小车后退函数
def backward():
board.digital[in1].write(0)
board.digital[in2].write(1)
board.digital[enableA].write(255)
board.digital[in3].write(0)
board.digital[in4].write(1)
board.digital[enableB].write(255)
# 控制小车停止函数
def stop():
board.digital[enableA].write(0)
board.digital[enableB].write(0)
# 主程序
if __name__ == "__main__":
forward()
time.sleep(2)
backward()
time.sleep(2)
stop()
```
通过以上代码,可以实现小车前进、后退、停止的控制功能。在实际项目中,可以根据具体需求扩展控制逻辑,实现更多复杂的动作。
#### 4.2 L298N驱动模块在机器人设计中的应用
除了普通电机控制外,L298N驱动模块还常用于机器人设计中,如小型智能车、机械臂等。通过L298N模块可以精确控制各个电机的速度和方向,实现机器人的运动和动作控制。下面是一个基于树莓派和L298N的机器人控制代码示例:
```python
# 导入RPi.GPIO库
import RPi.GPIO as GPIO
import time
# 配置引脚
ENA = 13
IN1 = 19
IN2 = 26
ENB = 20
IN3 = 16
IN4 = 21
# 初始化GPIO设置
GPIO.setmode(GPIO.BCM)
GPIO.setup(ENA, GPIO.OUT)
GPIO.setup(IN1, GPIO.OUT)
GPIO.setup(IN2, GPIO.OUT)
GPIO.setup(ENB, GPIO.OUT)
GPIO.setup(IN3, GPIO.OUT)
GPIO.setup(IN4, GPIO.OUT)
# 控制机器人前进函数
def forward():
GPIO.output(IN1, GPIO.HIGH)
GPIO.output(IN2, GPIO.LOW)
GPIO.output(ENA, GPIO.HIGH)
GPIO.output(IN3, GPIO.HIGH)
GPIO.output(IN4, GPIO.LOW)
GPIO.output(ENB, GPIO.HIGH)
# 控制机器人后退函数
def backward():
GPIO.output(IN1, GPIO.LOW)
GPIO.output(IN2, GPIO.HIGH)
GPIO.output(ENA, GPIO.HIGH)
GPIO.output(IN3, GPIO.LOW)
GPIO.output(IN4, GPIO.HIGH)
GPIO.output(ENB, GPIO.HIGH)
# 控制机器人停止函数
def stop():
GPIO.output(ENA, GPIO.LOW)
GPIO.output(ENB, GPIO.LOW)
# 主程序
if __name__ == "__main__":
forward()
time.sleep(2)
backward()
time.sleep(2)
stop()
GPIO.cleanup()
```
通过上述代码,可以实现基于树莓派的机器人控制,包括前进、后退和停止等功能。在实际机器人项目中,可以结合传感器等模块,实现更多智能化的功能。
#### 4.3 L298N驱动模块在自动化控制系统中的应用
除了上述的应用案例外,L298N驱动模块还常用于各类自动化控制系统中,如工业生产线、智能家居等。通过L298N模块的稳定性和可靠性,可以实现对各种执行器的精确控制,满足自动化控制系统对驱动模块的需求。
以上是一些L298N驱动模块在不同应用领域的案例,展示了其在电机控制、机器人设计、自动化控制等方面的实际应用场景。希望能够给读者带来启发与帮助。
# 5. L298N驱动模块参数与性能评估
L298N驱动模块作为电机控制领域中常用的驱动器件,其性能参数和稳定性对于系统的运行至关重要。在选型和应用过程中,对L298N驱动模块的参数进行评估可以有效地指导设计和优化。本章将围绕L298N驱动模块的电性能参数、温度特性分析以及效率与稳定性评估展开。
### 5.1 L298N驱动模块的电性能参数
在实际应用中,L298N驱动模块的电性能参数直接影响着电机的控制效果。常见的电性能参数包括:
- **电压范围:** L298N驱动模块可支持的电压范围,一般为5V至35V。
- **最大输出电流:** L298N驱动模块可输出的最大电流,通常为2A至3A。
- **最大功率:** 根据电压和最大输出电流计算得出。
- **工作温度范围:** L298N驱动模块的正常工作温度范围。
- **静态工作电流:** 模块在工作时的静态电流消耗。
- **过流保护:** 针对过大电流进行保护的功能。
通过以上电性能参数的评估,可以选择适合具体应用场景的L298N驱动模块,确保系统稳定可靠运行。
### 5.2 L298N驱动模块的温度特性分析
温度是影响电子元器件性能的重要因素之一,对于L298N驱动模块来说也同样重要。温度过高会导致模块性能下降甚至损坏,因此需要对L298N驱动模块的温度特性进行分析,包括:
- **工作温度范围:** 模块正常工作的温度范围。
- **最大工作温度:** 模块可以承受的最高温度。
- **热管理设计:** 是否需要外部散热器等热管理装置。
- **温度传感器:** 是否内置温度传感器用于实时监测温度。
在实际应用中,合理设计散热系统、控制工作温度可以有效提升L298N驱动模块的稳定性和可靠性。
### 5.3 L298N驱动模块的效率与稳定性评估
L298N驱动模块的效率和稳定性直接关系到系统的功耗和稳定性。在评估L298N驱动模块的效率与稳定性时,需要考虑以下因素:
- **工作效率:** 输出功率与输入功率的比值。
- **电流波动:** 输出电流的波动情况。
- **电压稳定性:** 输出电压的稳定性。
- **抗干扰能力:** 对于外部干扰的抵抗能力。
通过对L298N驱动模块的效率与稳定性进行评估,可以为电机控制系统的设计和优化提供重要参考,确保系统稳定运行且具有良好的性能表现。
在实际项目中,针对不同的应用场景,可以根据具体需求对L298N驱动模块的参数和性能进行调整和优化,以达到最佳的控制效果和系统稳定性。
# 6. L298N驱动模块选型与注意事项
在选择和应用L298N驱动模块时,需要考虑一些关键因素以确保系统正常运行并提高效率。本章将介绍L298N驱动模块的选型指南以及使用注意事项,同时提供常见问题的解决方法和维护建议。
#### 6.1 L298N驱动模块选型指南
在选择L298N驱动模块时,需要考虑以下几个方面:
1. **电流需求**:根据所控制的电机或负载的电流需求选择合适的L298N型号,以确保L298N能够承受相应的负载电流。
2. **电压匹配**:L298N驱动模块的工作电压范围需与系统的电压匹配,避免电压不匹配导致的损坏。
3. **功率要求**:根据系统的功率需求选择适当的L298N版本,以确保L298N能够提供足够的功率输出。
4. **接口需求**:考虑系统的接口需求,选择具有适配接口的L298N模块,方便系统集成和控制。
5. **成本效益**:在满足系统需求的前提下,考虑成本因素选择性价比较高的L298N型号。
#### 6.2 L298N驱动模块使用注意事项
在使用L298N驱动模块时,需要注意以下几点:
1. **电源接入**:正确接入电源并确保电源参数符合L298N的工作要求,避免过电压或过电流导致损坏。
2. **接线正确**:按照L298N模块的引脚定义正确接线,避免接错引脚导致电路异常或损坏。
3. **散热问题**:L298N在高负载情况下会产生一定热量,需考虑散热措施以确保L298N的稳定工作。
4. **防静电防磁场**:在处理L298N模块时避免静电干扰和磁场干扰,可以使用静电手环等防护措施。
5. **保护措施**:考虑加入过压保护、过流保护等电路保护措施,以保护L298N和整个系统的安全。
#### 6.3 L298N驱动模块常见问题解决与维护建议
常见问题及解决方法:
1. **电机无法正常转动**:检查电源接入是否正确、引脚接线是否准确,确认L298N模块正常工作。
2. **L298N发热严重**:考虑增加散热措施,如添加散热片或风扇,降低L298N温度。
3. **电机运行不稳定**:检查控制信号是否稳定,排除控制信号问题。
维护建议:
- 定期检查L298N模块的连接状态,确保接线牢固无松动。
- 定时清洁L298N模块表面灰尘,保持散热良好。
- 在长时间使用后,可以考虑对L298N模块进行全面检查和维护,保证系统长期稳定运行。
通过严谨的选型和遵守正确的使用和维护方法,可以更好地发挥L298N驱动模块的性能,确保系统的稳定性和可靠性。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了使用 STM32F103 微控制器和 L298N 驱动模块实现 PWM 控制两路直流电机的实践案例。文章涵盖了以下主题:
* STM32F103 微控制器的基础和应用
* PWM 信号在电机控制中的原理和作用
* L298N 驱动模块的特性和工作原理
* STM32F103 和 L298N 的接口连接和配置
* 使用 STM32CubeMX 工具配置 PWM 输出
* STM32 HAL 库中 PWM 模块的用法
* STM32F103 定时器的原理和使用方法
* L298N 驱动模块的驱动原理和电机控制方式
* PWM 输出的时序控制技巧
* 单路和双路直流电机控制实例
* 电机速度、方向、加速度控制和保护回路的设计
* PWM 相位补偿和频率调节技术
* 电机启停、匀速运动和反向运动控制方法
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
无线通信的黄金法则:CSMA_CA与CSMA_CD的比较及实战应用

# 摘要
本文系统地探讨了无线通信中两种重要的载波侦听与冲突解决机制:CSMA/CA(载波侦听多路访问/碰撞避免)和CSMA/CD(载波侦听多路访问/碰撞检测)。文中首先介绍了CSMA的基本原理及这两种协议的工作流程和优劣势,并通过对比分析,深入探讨了它们在不同网络类型中的适用性。文章进一步通
Go语言实战提升秘籍:Web开发入门到精通

# 摘要
Go语言因其简洁、高效以及强大的并发处理能力,在Web开发领域得到了广泛应用。本文从基础概念到高级技巧,全面介绍了Go语言Web开发的核心技术和实践方法。文章首先回顾了Go语言的基础知识,然后深入解析了Go语言的Web开发框架和并发模型。接下来,文章探讨了Go语言Web开发实践基础,包括RES
【监控与维护】:确保CentOS 7 NTP服务的时钟同步稳定性
# 摘要
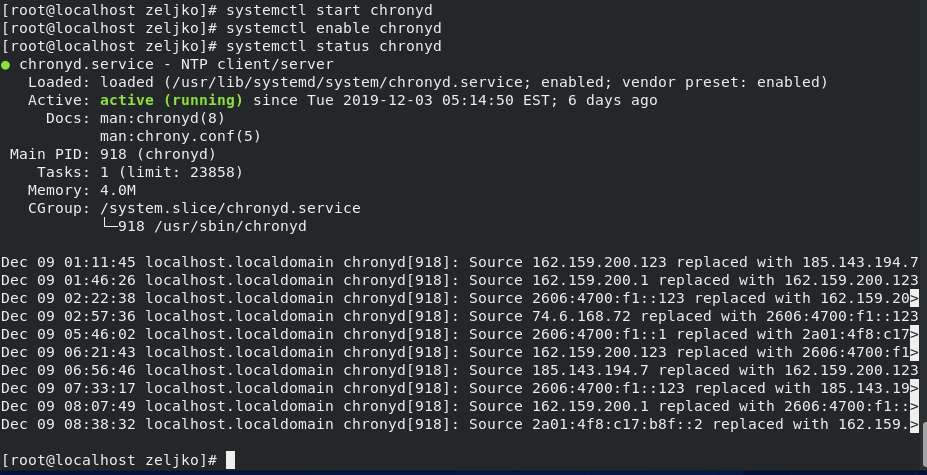
本文详细介绍了NTP(Network Time Protocol)服务的基本概念、作用以及在CentOS 7系统上的安装、配置和高级管理方法。文章首先概述了NTP服务的重要性及其对时间同步的作用,随后深入介绍了在CentOS 7上NTP服务的安装步骤、配置指南、启动验证,以及如何选择合适的时间服务器和进行性能优化。同时,本文还探讨了NTP服务在大规模环境中的应用,包括集
【5G网络故障诊断】:SCG辅站变更成功率优化案例全解析
# 摘要
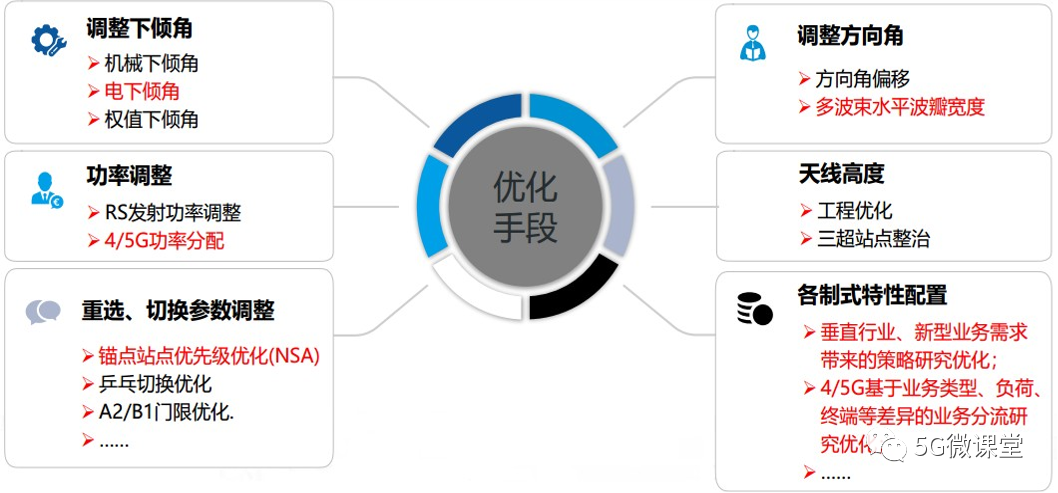
随着5G网络的广泛应用,SCG辅站作为重要组成部分,其变更成功率直接影响网络性能和用户体验。本文首先概述了5G网络及SCG辅站的理论基础,探讨了SCG辅站变更的技术原理、触发条件、流程以及影响成功率的因素,包括无线环境、核心网设备性能、用户设备兼容性等。随后,文章着重分析了SCG辅站变更成功率优化实践,包括数据分析评估、策略制定实施以及效果验证。此外,本文还介绍了5
PWSCF环境变量设置秘籍:系统识别PWSCF的关键配置

# 摘要
本文全面阐述了PWSCF环境变量的基础概念、设置方法、高级配置技巧以及实践应用案例。首先介绍了PWSCF环境变量的基本作用和配置的重要性。随后,详细讲解了用户级与系统级环境变量的配置方法,包括命令行和配置文件的使用,以及环境变量的验证和故障排查。接着,探讨了环境变量的高级配
掌握STM32:JTAG与SWD调试接口深度对比与选择指南
# 摘要
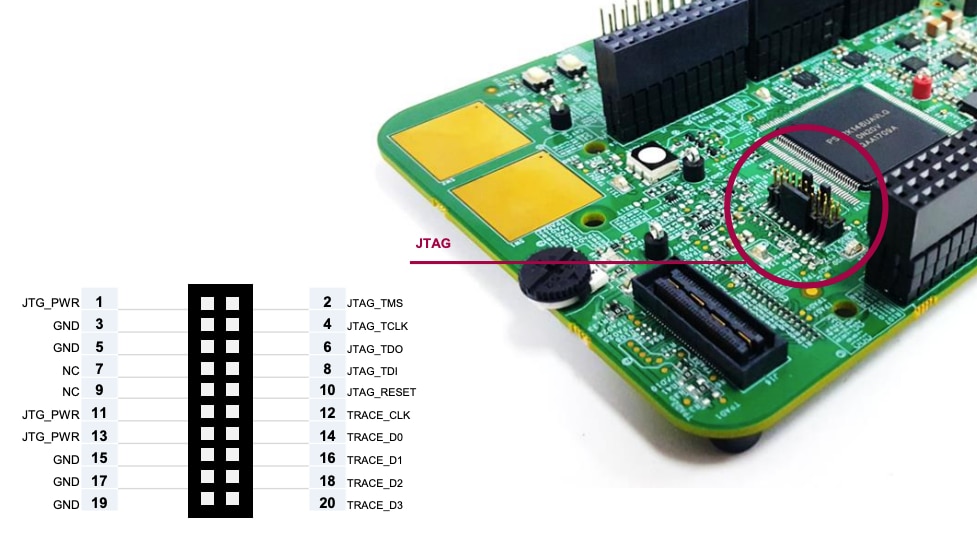
随着嵌入式系统的发展,调试接口作为硬件与软件沟通的重要桥梁,其重要性日益凸显。本文首先概述了调试接口的定义及其在开发过程中的关键作用。随后,分别详细分析了JTAG与SWD两种常见调试接口的工作原理、硬件实现以及软件调试流程。在此基础上,本文对比了JTAG与SWD接口在性能、硬件资源消耗和应用场景上的差异,并提出了针对STM32微控制器的调试接口选型建议。最后,本文探讨
ACARS社区交流:打造爱好者网络

# 摘要
ACARS社区作为一个专注于ACARS技术的交流平台,旨在促进相关技术的传播和应用。本文首先介绍了ACARS社区的概述与理念,阐述了其存在的意义和目标。随后,详细解析了ACARS的技术基础,包括系统架构、通信协议、消息格式、数据传输机制以及系统的安全性和认证流程。接着,本文具体说明了ACARS社区的搭
Paho MQTT消息传递机制详解:保证消息送达的关键因素
# 摘要
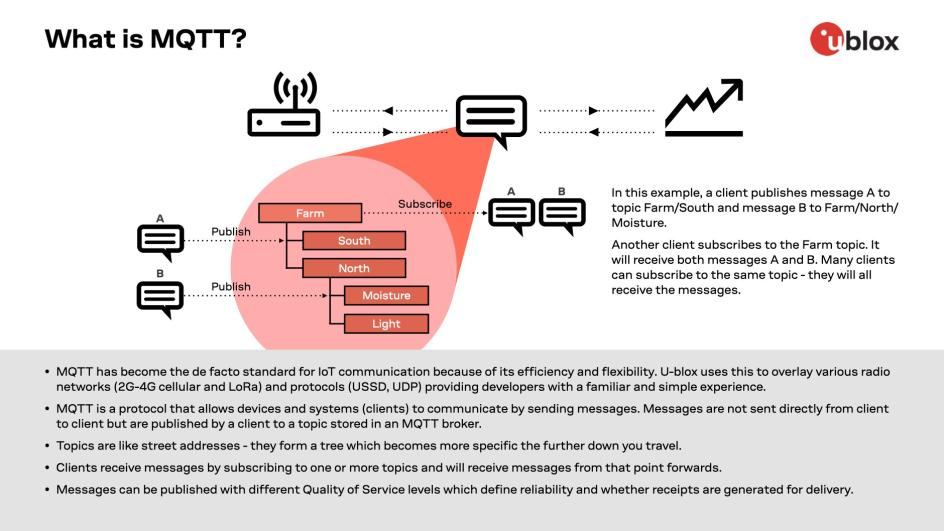
本文深入探讨了MQTT消息传递协议的核心概念、基础机制以及保证消息送达的关键因素。通过对MQTT的工作模式、QoS等级、连接和会话管理的解析,阐述了MQTT协议的高效消息传递能力。进一步分析了Paho MQTT客户端的性能优化、安全机制、故障排查和监控策略,并结合实践案例,如物联网应用和企业级集成,详细介绍了P
保护你的数据:揭秘微软文件共享协议的安全隐患及防护措施{安全篇

# 摘要
本文对微软文件共享协议进行了全面的探讨,从理论基础到安全漏洞,再到防御措施和实战演练,揭示了协议的工作原理、存在的安全威胁以及有效的防御技术。通过对安全漏洞实例的深入分析和对具体防御措施的讨论,本文提出了一个系统化的框架,旨在帮助IT专业人士理解和保护文件共享环境,确保网络数据的安全和完整性。最
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )