A3C算法在机器人控制中的应用:赋能智能机器人,探索新可能
发布时间: 2024-08-20 07:03:32 阅读量: 46 订阅数: 46 

ABB机器人及运动控制业务:赋能制造业 释放数字化价值.pdf
# 1. A3C算法概述**
A3C(Asynchronous Advantage Actor-Critic)算法是一种强化学习算法,它通过异步并行的方式训练多个Actor-Critic网络。在A3C算法中,Actor网络负责根据当前状态选择动作,而Critic网络负责评估动作的价值。
A3C算法的优势在于其并行性和异步性。通过使用多个Actor网络,A3C算法可以同时探索多个动作,从而提高训练效率。此外,异步训练方式允许Actor网络在训练过程中与环境交互,而无需等待Critic网络的更新,这进一步提高了训练速度。
# 2. A3C算法在机器人控制中的理论应用
### 2.1 强化学习与A3C算法
#### 2.1.1 强化学习的基本概念
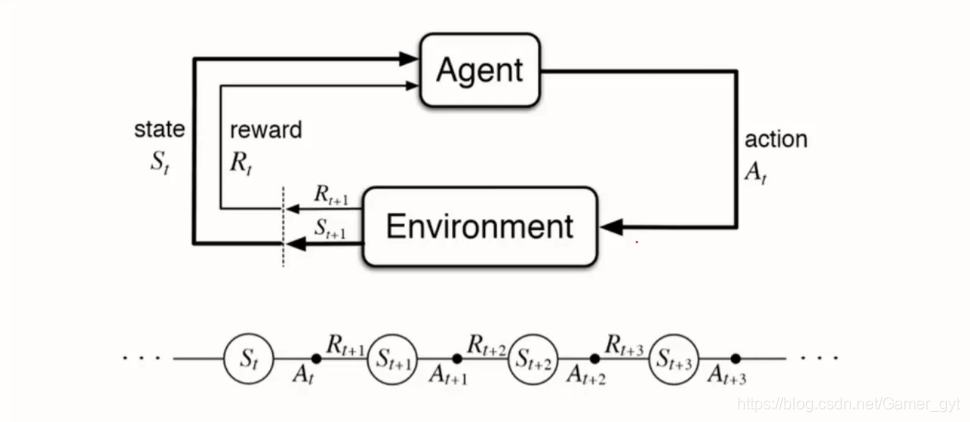
强化学习是一种无监督机器学习方法,它使代理能够在与环境交互时学习最优行为策略。强化学习的关键概念包括:
- **状态 (S)**:环境的当前状态。
- **动作 (A)**:代理可以在当前状态下执行的动作。
- **奖励 (R)**:代理执行动作后收到的奖励。
- **价值函数 (V)**:状态或动作序列的长期奖励期望。
- **策略 (π)**:给定状态下选择动作的规则。
强化学习的目标是找到一个策略,使代理获得最大的累积奖励。
#### 2.1.2 A3C算法的原理和优势
A3C(Asynchronous Advantage Actor-Critic)算法是一种强化学习算法,它将Actor-Critic方法与异步并行训练相结合。A3C算法的原理如下:
- **Actor网络**:负责根据当前状态选择动作。
- **Critic网络**:负责估计状态或动作序列的价值。
- **异步训练**:多个Actor-Critic副本同时与环境交互,并异步更新其参数。
A3C算法的优势包括:
- **并行性**:异步训练允许多个代理同时学习,提高训练效率。
- **稳定性**:Actor和Critic网络的异步更新有助于稳定训练过程。
- **可扩展性**:A3C算法可以轻松扩展到分布式训练环境中。
### 2.2 A3C算法在机器人控制中的应用场景
A3C算法在机器人控制中具有广泛的应用场景,主要包括:
#### 2.2.1 机器人运动控制
A3C算法可以用于训练机器人执行复杂的运动,例如:
- **关节运动控制**:控制机器人的关节角度和速度,实现流畅的运动。
- **轨迹跟踪**:使机器人沿着预定义的轨迹移动,提高精度和稳定性。
- **力控制**:控制机器人的力输出,实现与环境的交互。
#### 2.2.2 机器人决策制定
A3C算法还可以用于训练机器人做出决策,例如:
- **导航**:使机器人能够在未知环境中自主导航,避开障碍物并找到目标。
- **抓取**:训练机器人抓取和操纵物体,提高抓取成功率和精度。
- **规划**:使机器人能够根据传感器数据和环境信息进行规划,制定最优行动策略。
# 3. A3C算法在机器人控制中的实践应用
### 3.1 A3C算法的实现方法
#### 3.1.1 算法框架搭建
A3C算法的实现框架主要包含以下几个关键组件:
- **Actor网络:**负责根据当前状态做出动作决策。
- **Critic网络:**负责评估Actor网络的决策质量,提供价值函数估计。
- **环境:**模拟机器人与环境的交互,提供状态和奖励反馈。
- **共享内存:**用于在Actor和Critic网络之间共享参数和梯度。
#### 3.1.2 环境模拟和奖励函数设计
环境模拟是A3C算法训练的关键环节,需要真实地反映机器人与环境的交互。奖励函数的设计则决定了算法的学习目标和优化方向。
**环境模拟:**
- **机器人运动控制:**模拟机器人的运动学和动力学,提供机器人状态和动作执行结果。
- **机器人决策制定:**模拟机器人面临的决策问题,提供决策空间和状态反馈。
**奖励函数:**
- **机器人抓取任务:**奖励机器人成功抓取目标物体,惩罚失败抓取。
- **机器人导航任务:**奖励机器人到达目标位置,惩罚偏离目标路径。
### 3.2 A3C算法

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《强化学习中的A3C算法》专栏深入探讨了A3C算法及其在强化学习中的应用。专栏涵盖了A3C算法的优化技巧、实战指南、变体、优缺点分析、代码实现、在机器人控制、金融、医疗保健、推荐系统、计算机视觉等领域的应用,以及算法的局限性、改进方向、最新研究进展和产业应用案例。通过全面解析A3C算法,该专栏为强化学习从业者和研究人员提供了宝贵的见解,帮助他们掌握该算法并将其应用于各种实际问题中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Zkteco智慧多地点管理ZKTime5.0:集中控制与远程监控完全指南

# 摘要
本文对Zkteco智慧多地点管理系统ZKTime5.0进行了全面的介绍和分析。首先概述了ZKTime5.0的基本功能及其在智慧管理中的应用。接着,深入探讨了集中控制系统的理论基础,包括定义、功能、组成架构以及核心技术与优势。文章详细讨论了ZKTime5.0的远程监控功能,着重于其工作原理、用户交互设计及安全隐私保护。实践部署章节提供了部署前准备、系统安装配置
Java代码安全审查规则解析:深入local_policy.jar与US_export_policy.jar的安全策略

# 摘要
本文系统探讨了Java代码安全审查的全面方法与实践。首先介绍了Java安全策略文件的组成及其在不同版本间的差异,对权限声明进行了深入解析。接着,文章详细阐述了进行安全审查的工具和方法,分析了安全漏洞的审查实例,并讨论了审查报告的撰写和管理。文章深入理解Java代码安
数字逻辑深度解析:第五版课后习题的精华解读与应用

# 摘要
数字逻辑作为电子工程和计算机科学的基础,其研究涵盖了从基本概念到复杂电路设计的各个方面。本文首先回顾了数字逻辑的基础知识,然后深入探讨了逻辑门、逻辑表达式及其简化、验证方法。接着,文章详细分析了组合逻辑电路和时序逻辑电路的设计、分析、测试方法及其在电子系统中的应用。最后,文章指出了数字逻辑电路测试与故障诊断的重要性,并探讨了其在现代电子系统设计中的创新应用
【CEQW2监控与报警机制】:构建无懈可击的系统监控体系

# 摘要
监控与报警机制是确保信息系统的稳定运行与安全防护的关键技术。本文系统性地介绍了CEQW2监控与报警机制的理论基础、核心技术和应用实践。首先概述了监控与报警机制的基本概念和框架,接着详细探讨了系统监控的理论基础、常用技术与工具、数据收集与传输方法。随后,文章深入分析了报警机制的理论基础、操作实现和高级应用,探讨了自动化响应流程和系统性能优化。此外,本文还讨论了构建全面监控体系的架构设计、集成测试及维
电子组件应力筛选:IEC 61709推荐的有效方法

# 摘要
电子组件在生产过程中易受各种应力的影响,导致性能不稳定和早期失效。应力筛选作为一种有效的质量控制手段,能够在电子组件进入市场前发现潜在的缺陷。IEC 61709标准为应力筛选提供了理论框架和操作指南,促进了该技术在电子工业中的规范化应用。本文详细解读了IEC 61709标准,并探讨了应力筛选的理论基础和统计学方法。通过分析电子组件的寿命分
ARM处理器工作模式:剖析7种运行模式及其最佳应用场景

# 摘要
ARM处理器因其高性能和低功耗的特性,在移动和嵌入式设备领域得到广泛应用。本文首先介绍了ARM处理器的基本概念和工作模式基础,然后深入探讨了ARM的七种运行模式,包括状态切换、系统与用户模式、特权模式与异常模式的细节,并分析了它们的应用场景和最佳实践。随后,文章通过对中断处理、快速中断模式和异常处理模式的实践应用分析,阐述了在实时系统中的关键作用和设计考量。在高级应用部分,本文讨论了安全模式、信任Z
UX设计黄金法则:打造直觉式移动界面的三大核心策略

# 摘要
随着智能移动设备的普及,直觉式移动界面设计成为提升用户体验的关键。本文首先概述移动界面设计,随后深入探讨直觉式设计的理论基础,包括用户体验设计简史、核心设计原则及心理学应用。接着,本文提出打造直觉式移动界面的实践策略,涉及布局、导航、交互元素以及内容呈现的直觉化设计。通过案例分析,文中进一步探讨了直觉式交互设计的成功与失败案例,为设
海康二次开发进阶篇:高级功能实现与性能优化

# 摘要
随着安防监控技术的发展,海康设备二次开发在智能视频分析、AI应用集成及云功能等方面展现出越来越重要的作用。本文首先介绍了海康设备二次开发的基础知识,详细解析了海康SDK的架构、常用接口及集成示例。随后,本文深入探讨了高级功能的实现,包括实时视频分析技术、AI智能应用集成和云功能的
STM32F030C8T6终极指南:最小系统的构建、调试与高级应用
# 摘要
本论文全面介绍了STM32F030C8T6微控制器的关键特性和应用,从最小系统的构建到系统优化与未来展望。首先,文章概述了微控制器的基本概念,并详细讨论了构建最小系统所需的硬件组件选择、电源电路设计、调试接口配置,以及固件准备。随后,论文深入探讨了编程和调试的基础,包括开发环境的搭建、编程语言的选择和调试技巧。文章还深入分析了微控制器的高级特性,如外设接口应用、中断系统优化、能效
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )