MATLAB数据拟合进阶技巧:解锁高级方法,探索数据拟合的无限可能
发布时间: 2024-06-13 08:42:20 阅读量: 87 订阅数: 45 

MATLAB数据拟合

# 1. MATLAB数据拟合概述**
数据拟合是利用数学模型描述给定数据集中数据的过程。在MATLAB中,可以使用各种函数和工具箱来执行数据拟合。
MATLAB数据拟合的基本步骤包括:
- **数据准备:**加载数据、预处理和探索数据以识别模式和异常值。
- **模型选择:**根据数据的性质和拟合目标选择合适的数学模型。
- **参数估计:**使用最小二乘法或其他优化算法估计模型参数。
- **模型评估:**使用残差分析、交叉验证和其他技术评估拟合模型的准确性和鲁棒性。
# 2. 高级拟合算法**
**2.1 非线性最小二乘法**
非线性最小二乘法 (NLLS) 是一种用于拟合非线性函数到数据的算法。它通过最小化平方和误差来找到一组参数,使得拟合函数与数据点之间的距离最小。
**2.1.1 Levenberg-Marquardt 算法**
Levenberg-Marquardt (LM) 算法是 NLLS 中最常用的算法之一。它结合了高斯-牛顿法和梯度下降法的优点。LM 算法在目标函数接近最小值时表现出快速的收敛速度,并且在目标函数非凸时也能保持鲁棒性。
```
function [x, resnorm, residual, exitflag, output] = lsqnonlin(fun, x0, lb, ub, options)
%LSQNONLIN Nonlinear least squares minimization.
% X = LSQNONLIN(FUN,X0) finds a local minimum of the sum of squares of
% M nonlinear functions in N variables by using a trust-region-reflective
% algorithm. FUN is a function handle that evaluates the functions and
% returns their values in a vector F such that
%
% F(X) = [f_1(x_1,x_2,...,x_N), f_2(x_1,x_2,...,x_N), ..., f_M(x_1,x_2,...,x_N)]^T
%
% X0 is a vector of initial guesses for the solution.
%
% X = LSQNONLIN(FUN,X0,LB,UB) defines lower and upper bounds on the
% design variables, X, so that the solution is always in the range
% LB <= X <= UB. Use empty matrices for LB and UB if no bounds exist. Set
% LB(i) == -Inf or UB(i) == Inf if no lower or upper bound exists,
% respectively, for X(i).
%
% X = LSQNONLIN(FUN,X0,LB,UB,OPTIONS) minimizes with the default
% optimization parameters replaced by values in the structure OPTIONS.
% Create OPTIONS with the OPTIMOPTIONS function. See OPTIMOPTIONS for details.
%
% [X,RESNORM] = LSQNONLIN(...) returns the value of the sum of squares
% of the residuals, F(X)'*F(X), at the solution X.
%
% [X,RESNORM,RESIDUAL] = LSQNONLIN(...) returns the vector of residuals,
% F(X), at the solution X.
%
% [X,RESNORM,RESIDUAL,EXITFLAG] = LSQNONLIN(...) returns an EXITFLAG that
% describes the exit condition of LSQNONLIN. Possible values of EXITFLAG
% and their corresponding exit conditions are listed in the table below.
%
% EXITFLAG EXIT CONDITION
% --------- ----------------
% 1 First-order optimality measure was less than the
% specified tolerance.
% 2 Both the maximum number of iterations and the maximum
% number of function evaluations were exceeded.
% 3 Change in X was less than the specified tolerance.
% 4 Magnitude of the gradient was less than the specified
% tolerance.
% 5 Relative function value was less than the specified tolerance.
% 6 Line search failed to find a lower function value.
% 7 Magnitude of the step was less than the specified tolerance.
% -1 LSQNONLIN terminated because the user-supplied objective
% function or gradient function was invalid.
% -2 LSQNONLIN terminated because the user-supplied objective
% function or gradient function was computationally
% infeasible.
% -3 LSQNONLIN terminated because the user-supplied objective
% function or gradient function was terminated by the user.
%
% [X,RESNORM,RESIDUAL,EXITFLAG,OUTPUT] = LSQNONLIN(...) returns a
% structure OUTPUT with the following fields:
%
% iterations: Number of iterations taken to reach the solution.
% funcCount: Number of function evaluations that were made.
% algorithm: Algorithm used to solve the problem.
% firstorderopt: First-order optimality measure at the solution X.
% stepsize: Step size used in the last iteration.
% trustregionradius: Trust-region radius at the solution X.
%
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 MATLAB 数据拟合指南,从小白到大师的进阶之路!本专栏将带你踏上数据拟合之旅,揭开曲线拟合的艺术,规避常见陷阱,提升模型精度,解锁高级方法,应对复杂数据,洞察趋势,预测结果,提取图像价值,分析信号动态,训练预测模型,探索神经网络,优化算法,评估模型可靠性,清晰呈现结果,优化代码,确保最佳实践,解决实际问题,探索行业应用。无论你是数据分析新手还是经验丰富的专家,本专栏都将为你提供宝贵的见解和实用技巧,让你轻松应对数据挑战,让数据为你所用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
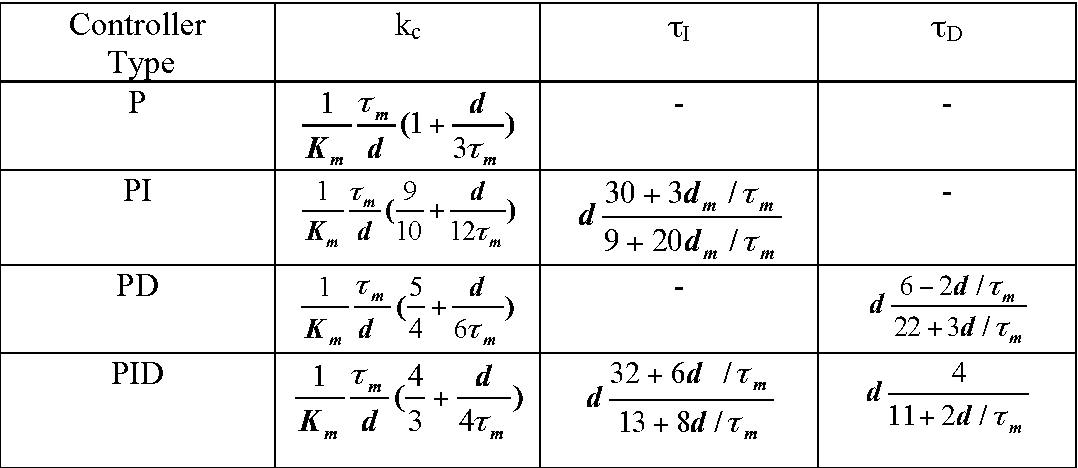
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
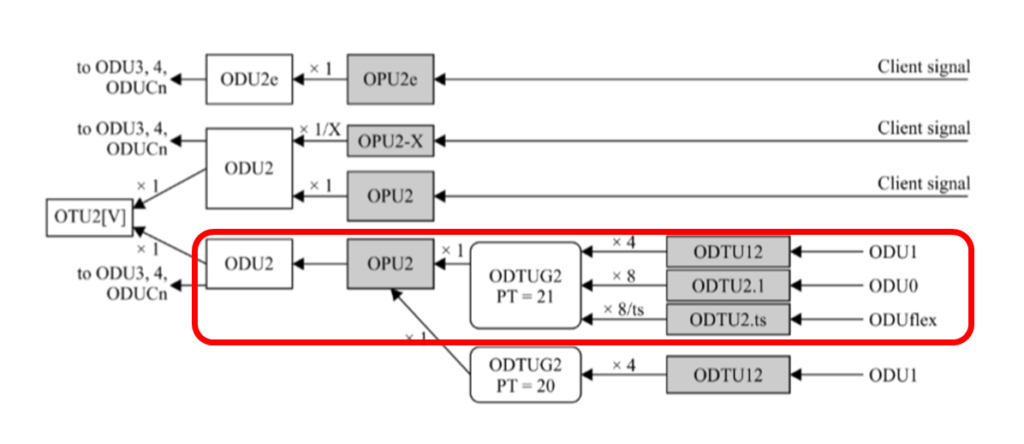
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
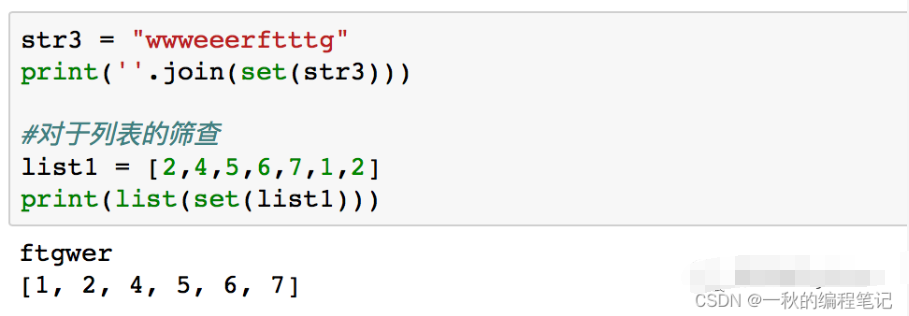
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )