单向链表性能提升秘籍:掌握这5个技巧,代码效率翻倍
发布时间: 2024-09-11 12:18:48 阅读量: 136 订阅数: 38 

zip4j.jar包下载,版本为 2.11.5

# 1. 单向链表简介及其性能痛点
单向链表是一种基础而重要的数据结构,它由一系列节点组成,每个节点都包含数据部分和指向下一个节点的指针。尽管其结构简单,但在插入和删除操作上具有优势,因为这些操作不需要移动元素,只需更新相邻节点的指针即可。
然而,在频繁的遍历操作中,单向链表面临着性能瓶颈。由于链表的节点在内存中可能是分散存储的,CPU缓存无法有效利用,导致链表的访问速度可能低于数组等其他数据结构。
为了深入理解单向链表,在下一章节,我们将探讨其底层数据结构,并尝试从多个角度优化链表的性能痛点,以提高其实用性和效率。
# 2. 单向链表的底层数据结构优化
### 2.1 链表节点设计的改进
#### 2.1.1 节点空间的动态分配与回收
在传统的单向链表实现中,每个节点的内存分配通常是通过标准库的动态内存分配函数来实现的,如C++中的`new`和`delete`,或者C语言中的`malloc`和`free`。这种分配方式虽然灵活,但会产生频繁的内存申请与释放操作,影响程序的性能,尤其是在节点频繁添加和删除时。
**优化策略**:为了优化节点空间的动态分配与回收,可以采用内存池技术。内存池预先分配了一块较大的内存空间,该空间被分割成多个固定大小的节点块,当链表需要添加新节点时,直接从内存池中分配,当节点被删除时,节点空间返回给内存池进行复用。
**代码实现与分析**:
```c
// 内存池节点结构定义
typedef struct MemoryPoolNode {
struct MemoryPoolNode *next;
char data[1]; // 假设每个节点的数据域是可变的
} MemoryPoolNode;
// 内存池初始化
MemoryPoolNode* init_memory_pool(size_t node_size, size_t pool_size) {
MemoryPoolNode *pool = malloc(pool_size);
if (pool) {
MemoryPoolNode *current = pool;
for (size_t i = 0; i < (pool_size / node_size) - 1; ++i) {
current->next = (MemoryPoolNode *)((char *)current + node_size);
current = current->next;
}
current->next = NULL; // 最后一个节点的next指针设置为NULL
}
return pool;
}
// 从内存池中分配节点
void* alloc_node_from_pool(MemoryPoolNode *pool) {
if (pool->next) {
void *node = pool->next;
pool->next = pool->next->next;
return node;
}
// 如果内存池中没有可用节点,则返回NULL
return NULL;
}
// 回收节点到内存池
void free_node_to_pool(MemoryPoolNode *pool, void *node) {
((MemoryPoolNode *)node)->next = pool->next;
pool->next = (MemoryPoolNode *)node;
}
```
在上述代码中,我们定义了内存池节点`MemoryPoolNode`,并实现了初始化内存池、从内存池中分配节点和回收节点到内存池的函数。使用内存池可以显著减少内存分配与回收的开销,提高链表操作的效率。
#### 2.1.2 节点结构的压缩与优化
在标准的单向链表中,每个节点除了存储数据外,还包含指针域来指向下一个节点。在某些应用场合,如存储小数据或者固定大小的数据,节点结构中的指针域占据了相对较大的空间,可以进行压缩优化。
**优化策略**:节点压缩可以通过减少指针域的空间,或者通过数据和指针域的合并来实现。例如,在64位系统中,指针大小为8字节,如果数据域较小,可以考虑使用较小的数据类型来减少整体节点的空间需求。
**代码实现与分析**:
```c
// 压缩后的链表节点定义
typedef struct CompactNode {
uint32_t data;
struct CompactNode *next;
} CompactNode;
// 假设我们存储的数据不会超过4字节大小
CompactNode* create_compact_node(uint32_t data) {
CompactNode *node = malloc(sizeof(CompactNode));
if (node) {
node->data = data;
node->next = NULL;
}
return node;
}
```
在这个例子中,我们将数据域限定为`uint32_t`类型,占用4字节空间,从而节省了指针占用的空间。需要注意的是,这样的压缩在数据类型的大小限制严格的情况下才能使用。如果链表中存储的数据超过4字节,则不适用,可能会造成数据丢失。
### 2.2 链表遍历效率的提升
#### 2.2.1 缓存友好的遍历算法
由于链表的非连续存储特性,节点间存在较大的内存间隔,这使得缓存效率较差,导致CPU缓存未命中率较高,从而影响链表遍历的速度。
**优化策略**:为了提高链表遍历的缓存效率,可以通过改变节点的数据结构和遍历算法来实现缓存友好的遍历。一个典型的优化方法是调整节点结构,使得频繁访问的数据相邻存放,或者在遍历时采用步长为缓存行大小的策略。
**代码实现与分析**:
```c
// 为了实现缓存友好的遍历,我们可以将节点中的数据部分重新组织为数组
typedef struct CacheFriendlyNode {
void *data[8]; // 假设每个节点中存放8个void指针大小的数据
struct CacheFriendlyNode *next;
} CacheFriendlyNode;
// 遍历链表的函数
void traverse_cache_friendly_list(CacheFriendlyNode *head) {
CacheFriendlyNode *current = head;
while (current != NULL) {
for (int i = 0; i < 8; ++i) {
// 处理data[i]指向的数据
}
current = current->next;
}
}
```
上述代码中,我们假设每个节点包含8个数据域,通过遍历数据域数组的方式来访问数据,这样可以在一个缓存行大小内尽可能访问更多的数据,减少缓存未命中的次数。需要注意的是,这种方法需要节点中的数据大小和数量适应缓存行大小,适用于数据大小相对固定,数量不多的场景。
#### 2.2.2 避免缓存未命中和页错误
在链表的遍历过程中,访问链表节点可能因为内存分页机制而触发页错误,这种页错误的开销要远远高于缓存未命中。
**优化策略**:由于页错误的发生与内存的物理分布有关,我们可以在链表初始化时,一次性地将整个链表结构分配到连续的内存区域中。这可以通过自定义内存分配器来实现,确保整个链表的内存分配尽可能地连续。
**代码实现与分析**:
```c
// 假设我们有一个自定义内存分配器来分配连续内存
void* allocate_memory_large_page(size_t size) {
// 实现省略,需要确保分配的内存区域尽可能连续
}
// 使用自定义内存分配器初始化链表
CacheFriendlyNode* init_large_page_list(size_t node_count) {
size_t list_size = sizeof(CacheFriendlyNode) * node_count;
CacheFriendlyNode *list = (CacheFriendlyNode *)allocate_memory_large_page(list_size);
if (list) {
// 初始化链表节点和连接节点等操作省略
}
return list;
}
```
在此实现中,我们假设存在一个名为`allocate_memory_large_page`的函数,它能够分配足够大的连续内存块来容纳整个链表。使用这样的内存分配策略可以减少因页错误引起的性能损失。需要注意的是,实际中创建足够大的连续内存空间是不容易的,尤其在大内存使用情况下,可能需要操作系统级别的支持。
### 2.3 链表内存使用优化
#### 2.3.1 减少内存碎片的策略
链表操作中,频繁的节点添加和删除会导致内存碎片化,尤其是当链表节点大小不一致时,这种碎片化的情况会更加严重。
**优化策略**:减少内存碎片的策略包括使用内存池技术,以及尽可能地使用大小固定的数据节点。此外,可以设计一种自定义的内存管理算法,例如,通过合并相邻的空闲内存块来减少内存碎片。
**代码实现与分析**:
```c
// 内存块定义
typedef struct MemoryBlock {
struct MemoryBlock *next;
size_t size;
} MemoryBlock;
// 合并相邻的空闲内存块
void merge_free_blocks(MemoryBlock *head) {
MemoryBlock *current = head;
while (current != NULL && current->next != NULL) {
if ((char *)current + current->size == (char *)current->next) {
// 发现相邻的空闲内存块,合并它们
current->size += current->next->size;
current->next = current->next->next;
} else {
// 移动到下一个内存块
current = current->next;
}
}
}
```
在这个代码中,我们定义了一个`MemoryBlock`结构来表示内存块,并实现了一个简单的合并相邻空闲内存块的函数。当链表节点被删除时,内存块会被添加到空闲链表中。在实际内存管理过程中,需要适时调用`merge_free_blocks`函数来减少内存碎片的产生。
#### 2.3.2 链表内存池技术的实现
内存池是减少内存碎片和提高内存分配效率的有效方法之一。通过预先分配一块大的内存区域,然后将这个区域分割成固定大小的内存块,可以减少内存的分配和释放次数,提高链表操作的性能。
**代码实现与分析**:
```c
// 内存池管理器的定义
typedef struct MemoryPoolManager {
MemoryBlock *free_blocks; // 空闲内存块链表
size_t block_size; // 内存块大小
size_t pool_size; // 内存池总大小
void *pool; // 指向内存池的指针
} MemoryPoolManager;
// 初始化内存池管理器
MemoryPoolManager* init_memory_pool_manager(size_t block_size, size_t pool_size) {
MemoryPoolManager *manager = malloc(sizeof(MemoryPoolManager));
if (manager) {
manager->pool = malloc(pool_size);
manager->block_size = block_size;
manager->pool_size = pool_size;
manager->free_blocks = NULL;
// 初始化空闲内存块链表
MemoryBlock *base_block = (MemoryBlock *)manager->pool;
base_block->next = NULL;
base_block->size = pool_size - sizeof(MemoryBlock);
manager->free_blocks = base_block;
}
return manager;
}
// 从内存池中分配内存块
void* allocate_from_pool(MemoryPoolManager *manager) {
if (manager->free_blocks == NULL) {
// 内存池空间不足,需要扩展
return NULL;
}
MemoryBlock *block = manager->free_blocks;
manager->free_blocks = block->next;
return (void *)((char *)block + sizeof(MemoryBlock));
}
// 将内存块回收到内存池中
void release_to_pool(MemoryPoolManager *manager, void *ptr) {
if (!manager) return;
// 计算内存块的位置
MemoryBlock *block = (MemoryBlock *)((char *)ptr - sizeof(MemoryBlock));
block->next = manager->free_blocks;
manager->free_blocks = block;
}
```
在这个内存池管理器的实现中,我们定义了一个`MemoryPoolManager`结构,它维护了内存池的空闲内存块链表。我们使用`allocate_from_pool`函数从内存池中分配内存,使用`release_to_pool`函数将内存块回收到内存池。通过这种方式,我们实现了内存的重用,大大减少了内存碎片的问题。
通过以上的优化策略,我们可以显著提升单向链表的性能。这些策略涵盖了从节点设计到内存管理的各个层面,不仅提高了效率,还减少了资源的浪费。在接下来的章节中,我们将进一步探索单向链表的高级操作技巧和在实际应用中的运用。
# 3. 单向链表的高级操作技巧
随着编程实践的深入,开发者会意识到,简单地使用单向链表进行基本的插入、删除操作远远不足以满足复杂场景的需求。本章节将深入探讨单向链表的高级操作技巧,这些技巧能够进一步提升链表的效率和实用性。
## 3.1 链表分割与合并技术
### 3.1.1 基于快慢指针的链表分割
在某些场景中,如并行处理和分治算法,将链表分割为多个部分是必要的。基于快慢指针的方法可以在单次遍历中有效地完成这一任务。这种方法涉及到两个指针:快指针(fast pointer)和慢指针(slow pointer)。快指针每次移动两步,慢指针每次移动一步。当快指针到达链表末尾时,慢指针将位于链表的中间位置,这时链表可以被分割为两部分。
下面是一个快慢指针分割链表的示例代码:
```python
class ListNode:
def __init__(self, value=0, next=None):
self.value = value
self.next = next
def split_list(head):
if not head or not head.next:
return head, None
slow, fast = head, head.next
while fast and fast.next:
slow = slow.next
fast = fast.next.next
mid = slow.next
slow.next = None
return head, mid
# 示例链表:1 -> 2 -> 3 -> 4 -> 5 -> None
head = ListNode(1, ListNode(2, ListNode(3, ListNode(4, ListNode(5)))))
left, right = split_list(head)
```
在这段代码中,`split_list` 函数通过快慢指针将链表分割为两部分,慢指针的下一个节点变成了第二部分的头节点。分割后,`left` 部分为 `1 -> 2 -> 3`,`right` 部分为 `4 -> 5`。
### 3.1.2 多链表的高效合并策略
合并多个链表是另一个常见的需求,特别是在数据整合的场景中。高效的合并策略要求在合并过程中保持元素的有序性,并且尽可能减少节点之间的移动。一个常用的策略是使用优先队列(最小堆)来管理所有链表的头节点,以保证能够高效地获取到最小值。
下面是使用优先队列合并多个链表的示例代码:
```python
import heapq
def merge_lists(lists):
dummy = ListNode(0)
current = dummy
heap = []
# 初始化优先队列
for node in lists:
if node:
heapq.heappush(heap, (node.value, node))
while heap:
value, node = heapq.heappop(heap)
current.next = node
current = current.next
node = node.next
if node:
heapq.heappush(heap, (node.value, node))
return dummy.next
# 示例链表:1 -> 4 -> 5, 1 -> 3 -> 4, 2 -> 6
list1 = ListNode(1, ListNode(4, ListNode(5)))
list2 = ListNode(1, ListNode(3, ListNode(4)))
list3 = ListNode(2, ListNode(6))
merged_list = merge_lists([list1, list2, list3])
```
在这段代码中,`merge_lists` 函数首先将每个链表的头节点及其值插入到优先队列(最小堆)中。然后,每次从堆中弹出最小值,将其添加到结果链表中,并将该节点的下一个节点(如果存在)重新加入到堆中。通过这种方式,可以实现多链表的高效合并。
## 3.2 减少链表操作时间复杂度
### 3.2.1 插入和删除操作的优化
在链表中进行插入和删除操作时,原始的时间复杂度为 O(1),但前提是已经定位到了要操作的节点。如果需要从头到尾顺序查找节点,那么整个操作的时间复杂度将是 O(n)。为了优化这一点,可以预先计算并存储链表中每个节点的前驱和后继节点的索引,这样在进行插入和删除操作时就可以直接跳转至目标节点。
### 3.2.2 查找和访问节点的加速方法
尽管链表不支持快速的随机访问,但可以通过一些策略来加速节点的查找和访问。例如,使用跳表(Skip List)结构,它是一个额外增加了一些层级的多层链表。每个层级的节点都是随机选择的,这样可以使得查找操作的时间复杂度降低到 O(log n)。
## 3.3 辅助数据结构的应用
### 3.3.1 使用哈希表优化链表操作
哈希表能够提供平均时间复杂度为 O(1) 的查找效率,将它与链表结合使用可以极大地优化链表中元素的查找和访问速度。例如,哈希表可以存储链表节点的值与节点在链表中的位置的映射关系,这样就可以快速访问到指定值的节点。
### 3.3.2 利用双指针解决特定问题
双指针技术在链表操作中非常有用,尤其是在解决具有特定条件的问题时。例如,在检测链表中的环(Cycle Detection)时,可以使用两个速度不同的指针,一个快一个慢,如果链表中存在环,那么快指针最终一定会追上慢指针。
## 表格
为了更好地理解各种高级操作技巧在不同场景下的效果,我们创建了下面的表格:
| 技巧 | 应用场景 | 效果 | 复杂度 |
|----------------------|-----------------------------------|------------------------|------------------|
| 快慢指针分割 | 并行处理,分治算法 | 链表分割效率高 | O(n) |
| 多链表合并 | 数据整合 | 保持元素有序,效率高 | O(n log n) |
| 哈希表辅助 | 加速查找和访问 | 平均 O(1) 查找效率 | O(n) |
| 双指针技术 | 环形链表检测,快速查找 | 解决特定问题 | O(n) 或 O(1) |
通过以上表格,我们能够看出在不同操作中,选择合适的技巧可以达到优化链表操作的目的。
## mermaid 流程图
下面的 mermaid 流程图展示了一个快慢指针在检测链表环时的工作原理:
```mermaid
graph LR
A[Start] --> B[Slow指针向后移动一步]
B --> C[Fast指针向后移动两步]
C --> D{Fast指针是否为空?}
D -- 是 --> E[链表无环]
D -- 否 --> F{Fast指针的下一个节点是否为空?}
F -- 是 --> G[链表有环]
F -- 否 --> B
```
## 代码块与参数说明
在我们上面的代码示例中,使用了 Python 语言进行演示,这主要是因为 Python 的语法清晰、简洁,易于理解。在实现链表分割与合并的操作中,我们没有使用额外的库,仅利用了 Python 的标准数据结构来完成任务。这样的实现方式降低了代码的复杂性,并使得算法易于理解和修改。
通过第三章的探讨,我们学会了如何高效地操作单向链表,包括分割、合并、使用辅助数据结构等高级技巧,进一步提升了我们使用链表解决问题的能力。在下一章节中,我们将深入探讨单向链表在实际应用中的场景。
# 4. 单向链表的实战应用场景分析
## 4.1 链表在算法竞赛中的应用
### 4.1.1 解决特定算法问题的链表策略
在算法竞赛中,链表通常用于解决那些需要动态数据结构的问题,或者问题中对数据的操作涉及到频繁的插入和删除。链表的动态内存分配能力使其在处理非连续数据片段时非常灵活。例如,在解决约瑟夫问题(Josephus Problem)时,可以使用循环链表来模拟这一过程,以优化空间和时间效率。
```c
typedef struct Node {
int data;
struct Node* next;
} Node;
// 创建一个循环链表解决约瑟夫问题
Node* createJosephusCircle(int n) {
Node *head = NULL, *tail = NULL, *temp = NULL;
for (int i = 1; i <= n; ++i) {
temp = (Node*)malloc(sizeof(Node));
temp->data = i;
temp->next = NULL;
if (head == NULL) {
head = temp;
tail = temp;
} else {
tail->next = temp;
tail = temp;
}
}
tail->next = head; // 使其成为一个循环链表
return head;
}
// 约瑟夫问题的求解函数
int josephus(int n, int k) {
Node* head = createJosephusCircle(n);
Node* prev = NULL;
Node* curr = head;
while (curr->next != curr) {
for (int i = 1; i < k; ++i) {
prev = curr;
curr = curr->next;
}
prev->next = curr->next; // 移除第k个节点
printf("出列的人编号:%d\n", curr->data);
free(curr);
curr = prev->next;
}
int lastPerson = curr->data;
free(curr);
return lastPerson;
}
```
在上述代码中,我们通过`createJosephusCircle`函数创建了一个包含n个节点的循环链表,模拟了n个人围成一圈的初始状态。`josephus`函数则是模拟了过程,每次数到第k个人时,就将其从链表中移除,直到链表中只剩下一个节点,即为最后生存的人。
### 4.1.2 链表与其他数据结构的组合使用
在算法竞赛中,链表通常与其他数据结构组合使用,以发挥其动态性和灵活性的优势。例如,我们可以将链表与哈希表结合,利用哈希表的快速查找特性来优化链表中节点的查找时间。
```c
#include <stdio.h>
#include <stdlib.h>
typedef struct Node {
int key;
struct Node* next;
} Node;
// 创建一个新节点
Node* createNode(int key) {
Node* newNode = (Node*)malloc(sizeof(Node));
newNode->key = key;
newNode->next = NULL;
return newNode;
}
// 哈希表与链表结合实现快速插入和查找
#define TABLE_SIZE 100
Node* hashTable[TABLE_SIZE];
void insert(int key) {
int index = key % TABLE_SIZE;
Node* newNode = createNode(key);
newNode->next = hashTable[index];
hashTable[index] = newNode;
}
Node* search(int key) {
int index = key % TABLE_SIZE;
Node* temp = hashTable[index];
while (temp) {
if (temp->key == key) {
return temp;
}
temp = temp->next;
}
return NULL;
}
int main() {
// 假设插入若干个key
for (int i = 0; i < 10; ++i) {
insert(i);
}
// 假设进行若干次查找
for (int i = 0; i < 10; ++i) {
Node* result = search(i);
if (result) {
printf("找到元素:%d\n", result->key);
} else {
printf("元素:%d 未找到\n", i);
}
}
return 0;
}
```
在这个例子中,我们使用了一个简单的哈希函数`key % TABLE_SIZE`来确定元素应该插入的链表。这种结构结合了哈希表的快速访问和链表的动态扩展性,非常适合在需要处理大量动态数据时使用。
## 4.2 链表在系统编程中的运用
### 4.2.1 内存分配器中的链表使用
在操作系统和系统编程中,链表被广泛用于实现内存分配器。内存分配器负责为进程提供内存资源,需要能够高效地分配和回收内存。链表在这里被用于跟踪空闲内存块。
```c
typedef struct FreeBlock {
size_t size;
struct FreeBlock* next;
} FreeBlock;
// 内存分配器中空闲内存块的初始化
FreeBlock* initializeFreeList(size_t totalSize) {
FreeBlock* head = (FreeBlock*)sbrk(0); // 获取当前堆的顶部
head->size = totalSize - sizeof(FreeBlock);
head->next = NULL;
return head;
}
// 分配内存
void* malloc(size_t size, FreeBlock* head) {
FreeBlock* current = head;
FreeBlock* prev = NULL;
while (current != NULL) {
if (current->size >= size) {
if (current->size == size) {
if (prev) {
prev->next = current->next;
} else {
head = current->next;
}
} else {
current->size -= size;
FreeBlock* newBlock = (FreeBlock*)((char*)current + current->size + sizeof(FreeBlock));
newBlock->size = size;
newBlock->next = current->next;
current->next = newBlock;
}
return (void*)((char*)current + sizeof(FreeBlock));
}
prev = current;
current = current->next;
}
return NULL; // 未找到足够大的内存块
}
// 回收内存
void free(void* ptr, FreeBlock* head) {
FreeBlock* block = (FreeBlock*)((char*)ptr - sizeof(FreeBlock));
block->next = head;
head = block;
}
int main() {
size_t totalSize = 10000;
FreeBlock* freeList = initializeFreeList(totalSize);
void* ptr = malloc(500, freeList);
free(ptr, freeList);
return 0;
}
```
上述代码展示了在C语言中使用链表实现一个简单的内存分配器。每个内存块由`FreeBlock`结构表示,包含大小和指向下一个内存块的指针。`malloc`函数用于分配内存,而`free`函数则将内存块归还给空闲列表。
### 4.2.2 链表在I/O调度算法中的角色
在操作系统中,链表还被用于实现I/O调度算法。例如,Linux内核中的调度算法经常利用链表来管理等待执行的I/O请求队列。
```c
typedef struct IOReturn {
int sector;
int status;
struct IOReturn* next;
} IOReturn;
// 添加一个请求到队列中
void addRequest(IOReturn** head, int sector) {
IOReturn* newRequest = (IOReturn*)malloc(sizeof(IOReturn));
newRequest->sector = sector;
newRequest->status = 0; // 0表示请求待处理
newRequest->next = *head;
*head = newRequest;
}
// 模拟处理请求
void processRequests(IOReturn** head) {
IOReturn* current = *head;
while (current != NULL) {
// 模拟处理I/O请求
printf("处理I/O请求,扇区:%d\n", current->sector);
current->status = 1; // 将状态置为1表示已完成处理
IOReturn* temp = current;
current = current->next;
free(temp);
}
*head = NULL;
}
int main() {
IOReturn* requestQueue = NULL;
addRequest(&requestQueue, 10);
addRequest(&requestQueue, 20);
processRequests(&requestQueue);
return 0;
}
```
在此例中,链表被用于构建一个队列,管理着一系列I/O请求。当处理函数`processRequests`被调用时,它会遍历队列,并模拟处理每个请求。使用链表管理I/O请求使得请求能够以请求到达的顺序被处理,并且可以很容易地插入新的请求到队列中的适当位置。
通过这些应用场景的分析,我们可以看到链表在算法竞赛和系统编程中发挥的重要作用。链表的动态特性和灵活的操作能力,使得它们成为了处理复杂数据结构和算法问题的有力工具。在下一章,我们将总结单向链表在性能提升方面的关键点,并展望未来的发展趋势和挑战。
# 5. 总结与展望
## 5.1 单向链表性能提升的关键总结
经过前几章的深入探讨,我们已经了解了单向链表的多种性能痛点,并且对其底层数据结构、高级操作技巧以及实际应用场景进行了全面分析。在性能提升方面,关键点主要包括:
- **节点设计改进**:通过动态分配和回收机制以及结构压缩,减少了内存碎片和提高了缓存利用效率。
- **遍历效率提升**:实现缓存友好的遍历算法,有效避免缓存未命中和页错误,加速了链表的遍历速度。
- **内存使用优化**:采用内存池技术,减少了内存碎片的产生,提升了内存管理的效率。
在实际应用中,我们通过具体的操作步骤和代码示例,展示了如何实现链表的分割与合并,以及如何应用辅助数据结构来减少操作时间复杂度。同时,我们也探讨了链表在算法竞赛和系统编程中的实战应用场景。
## 5.2 未来单向链表的发展趋势与挑战
随着计算机系统的发展和数据处理需求的不断增加,单向链表作为一种基础的数据结构,仍将继续在多个领域发挥重要作用。未来的发展趋势可能包括:
- **内存管理优化**:探索更高效的方法来管理动态分配的内存,减少垃圾回收的影响。
- **并行计算适应性**:提升链表操作在多线程环境下的安全性与效率,以适应并行计算的需求。
- **混合数据结构**:结合其他数据结构的优势,开发新的混合数据结构,以弥补单向链表的不足。
- **智能化自适应**:通过机器学习等智能技术,让链表能够在运行时根据数据访问模式自动调整自身结构,以优化性能。
总之,尽管单向链表已经是一个成熟的数据结构,但其仍有很大的发展空间。IT行业的从业者需要持续关注和研究,以推动其向前发展,更好地满足未来计算的需求。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨 Java 中单向链表的数据结构,涵盖其高级应用、性能提升技巧、与双向链表的对比、面试技巧、内存管理、并发编程、源码分析、排序方法、项目应用、数据持久化、设计模式、性能优化、集合框架比较、反转算法和常见问题解决策略。专栏旨在帮助 Java 开发人员全面掌握单向链表的原理、实现和应用,提高代码效率,解决面试难题,并深入理解 Java 集合框架和数据结构。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【高清视频传输新纪元】:揭秘CEA-861-G标准的行业影响

# 摘要
CEA-861-G标准作为高清视频传输领域的重要技术规范,旨在解决传统视频传输标准的局限性,推动行业向高质量的音视频传输迈进。本文全面介绍了CEA-861-G标准的技术原理,包括高清视频的基础技术、核心特征以及技术标准与行业兼容性。同时,本文深入探讨了该标准对行业的具体影响,包括在广播电视、流媒体服务和家庭影院系统等领域的应用案例,以及未来在5G时代的作用。最后,本文分析了CEA-861-G标准的实践应用挑
工业应用案例速成:西门子M430变频器在手,效率无忧

# 摘要
西门子M430变频器作为工业自动化领域中广泛应用的电力调节设备,对现代工业生产效率和质量控制至关重要。本文首先介绍了西门子M430变频器的基本概念、工作原理以及其技术参数。随后,本文详细探讨了该变频器的配置、调试过程及其在工业应用中的实际案例,包括自动化生产线的速度控制、节能改造与效率提升、以及特殊环境下变频器的应用。最后,本文对变频器的维护和故障排除
【无线网络新手速成】:H3C室外AP安装与配置的5大必知

# 摘要
本文旨在系统介绍室外无线接入点(AP)的安装、配置和维护知识,特别是在H3C品牌设备的实际应用方面。首先,本文为读者提供了无线网络和H3C室外AP设备的基础知识。随后,详细阐述了室外AP安装前的准备工作,包括网络环境评估与规划,以及硬件安装环境的搭建。紧接着,本文逐步讲述了室外AP的安装步骤,并在进阶技巧章节中提供了高级无线功能配置和性能优化的实用建议。最后,文章强调了室外AP管理与维护的重要
【CSP产品选型指南】:根据数据手册挑选最适合的CSP产品
# 摘要
本文综合分析了云服务提供商(CSP)产品的选型关键因素、实践方法和市场现状,旨在帮助企业在多变的市场需求和技术进步中做出明智的CSP产品决策。通过对性能指标、系统兼容性、安全稳定性等多个维度的分析,文章提供了CSP产品选型的详细实践方法,包括数据手册解读、性能测试和成本效益评估。此外,本文还探讨了CSP产品在特定行业应用中的实践案例,面
CENTUM VP系统安全性分析:专家告诉你如何保护工业控制系统不受威胁

# 摘要
随着工业自动化和信息技术的迅速融合,CENTUM VP系统作为工业控制系统的核心,在保障工厂生产安全与效率方面发挥着重要作用。然而,这些系统面临的安全挑战也随之增大。本文首先对CENTUM VP系统及其面临的安全威胁进行了概述,继而探讨了工业控制系统的基本安全原理,包括架构组成、通讯机制、安全性原则与防护措施。接着,本文深入分析了CENTUM VP系统安
【RAID技术全面剖析】:浪潮服务器RAID要点深度解读
# 摘要
RAID技术作为一种成熟的数据存储解决方案,广泛应用于服务器和数据存储系统中,以提升数据的可靠性和性能。本文首先概述了RAID技术的基础知识,并详细分析了RAID的不同级别,包括RAID 0至RAID 6的原理、优缺点及适用场景。随后,文章深入探讨了RAID技术的实现
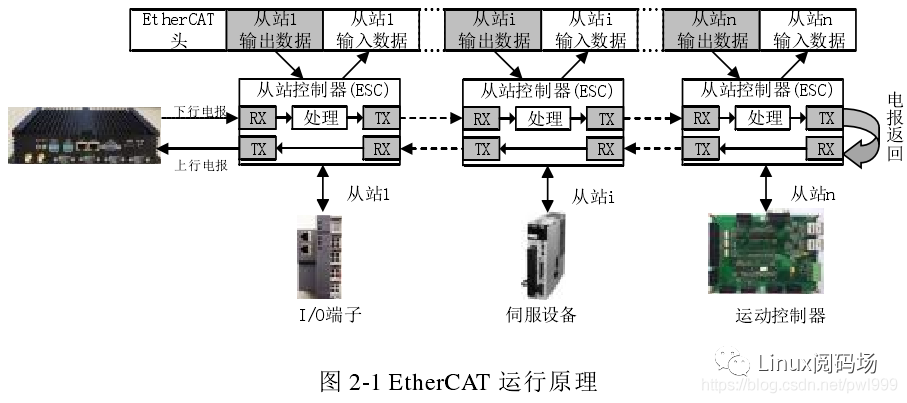
EtherCAT设备驱动开发:硬件兼容性与软件集成秘籍
# 摘要
本文对EtherCAT技术进行了全面的介绍,涵盖了从硬件兼容性到软件集成,再到驱动开发实践的各个方面。首先,本文概述了EtherCAT技术的基础知识和设备驱动开发的核心概念。随后,深入分析了EtherCAT通信协议的工作原理、网络拓扑结构及其与硬件兼容性的要求。在此基础上,进一步探讨了软件集成和开发环境的搭建,以
【Vue翻页组件单元测试】:编写与实施的详细指南,提高代码质量

# 摘要
随着前端技术的快速发展,Vue.js框架因其易用性和灵活
【CST-2020 GPU并行计算】:编程模型与实践,解锁仿真速度的新境界
# 摘要
本文系统地介绍了GPU并行计算的基础概念、CUDA编程模型、GPU并行编程实践技巧以及在仿真领域中的加速应用。首先,概述了GPU并行计算的基本理论和CUDA编程模型的关键构成,包括程序结构、内存管理以及流和并发执行。接着,探讨了GPU编程的高级技巧,包括性能优化、CUDA高级特性的应用和实际案例分析。文章进一步深入到仿真领域的应用,涵盖物理模拟、图像和视频处理以及机器学习和深度学习的GPU加速技术。此外,比较了GPU与其他并行计算平台,如OpenCL的异同,并讨论了跨平台并行计算的策略。最后,展望了GPU技术未来的发展方向和行业应用案例,并强调了持续学习和资源获取的重要性。
# 关
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )