The 10 Key Steps to Solving Partial Differential Equations: A Beginner's Essential Guide
发布时间: 2024-09-14 08:39:17 阅读量: 26 订阅数: 29 
# The 10 Key Steps to Solving Partial Differential Equations: A Beginner's Essential Guide
Partial Differential Equations (PDEs) are mathematical equations that describe the relationships between the partial derivatives of an unknown function with respect to several independent variables. They are widely used in various fields such as physics, engineering, and finance to model phenomena such as heat conduction, fluid dynamics, and wave propagation.
The general form of a PDE is:
```
F(u, u_x, u_y, u_xx, u_xy, u_yy, ...) = 0
```
where:
* `u` is the unknown function
* `u_x`, `u_y` are the partial derivatives of `u` with respect to `x` and `y`
* `u_xx`, `u_xy`, `u_yy` are the second-order partial derivatives of `u` with respect to `x` and `y`
Solving PDEs involves using numerical or analytical methods to approximate the unknown function `u`. Numerical methods discretize the PDE into a system of algebraic equations, whereas analytical methods employ mathematical techniques to obtain exact or approximate solutions.
# 2. Methods for Solving Partial Differential Equations
Solving Partial Differential Equations (PDEs) is a crucial task in science and engineering. PDEs describe how variables change in space and time within physical systems. Solving PDEs can help us understand and predict the behavior of these systems.
### 2.1 Numerical Me***
***mon numerical methods include:
#### 2.1.1 Finite Difference Method
The Finite Difference Method (FDM) discretizes PDEs into a set of algebraic equations. These equations represent the values of the PDE at grid points. FDM is a straightforward method, but its accuracy depends on the fineness of the grid.
```python
import numpy as np
# Define the partial differential equation
def pde(u, x, y):
return u**2 + x*y
# Define the grid
x = np.linspace(0, 1, 100)
y = np.linspace(0, 1, 100)
# Discretize the partial differential equation
u = np.zeros((len(x), len(y)))
for i in range(1, len(x)-1):
for j in range(1, len(y)-1):
u[i, j] = (pde(u[i, j], x[i], y[j]) +
pde(u[i+1, j], x[i+1], y[j]) +
pde(u[i-1, j], x[i-1], y[j]) +
pde(u[i, j+1], x[i], y[j+1]) +
pde(u[i, j-1], x[i], y[j-1])) / 5
# Output the result
print(u)
```
#### 2.1.2 Finite Element Method
The Finite Element Method (FEM) discretizes PDEs into a set of weighted residual equations. These equations represent the integral error of the PDE over weighted functions to be zero. FEM is a method of high accuracy, but it comes with higher computational costs.
#### 2.1.3 Spectral Method
The Spectral Method discretizes PDEs into a set of Fourier series. These series represent the expansion of the PDE over orthogonal functions. The Spectral Method is a method of very high accuracy, but it is only applicable to certain types of PDEs.
### 2.2 Analytical Methods
Analytical methods directly solve PDEs for their analytical solutions. Analytical solutions are the exact solutions of PDEs, ***mon analytical methods include:
#### 2.2.1 Method of Separation of Variables
The Method of Separation of Variables decomposes PDEs into a set of simpler equations that can be solved by separating variables. This method is only applicable to certain types of PDEs.
#### 2.2.2 Method of Characteristics
The Method of Characteristics solves PDEs along the characteristic lines of the PDE. It is a powerful method, but it is only applicable to certain types of PDEs.
#### 2.2.3 Variational Method
The Variational Method converts PDEs into a problem of minimizing a functional. By minimizing the functional, approximate solutions to the PDE can be obtained. The Variational Method is a general method, but it has high computational costs.
**Table 2.1: Comparison of PDE Solving Methods**
| Method | Advantages | Disadvantages |
|---|---|---|
| Numerical Methods | Easy to use | Accuracy is affected by grid fineness |
| Analytical Methods | Exact solutions | Only applicable to a few PDEs |
| Finite Difference Method | Easy to use | Low accuracy |
| Finite Element Method | High accuracy | High computational costs |
| Spectral Method | Very high accuracy | Only applicable to specific types of PDEs |
| Method of Separation of Variables | Easy to use | Only applicable to specific types of PDEs |
| Method of Characteristics | Powerful | Only applicable to specific types of PDEs |
| Variational Method | General | High computational costs |
# 3. Practical Applications of Solving Partial Differential Equations
### 3.1 Heat Conduction Equation
The heat conduction equation describes the process of heat transfer within a medium. Its general form is:
```
∂u/∂t = k∇²u
```
where:
* u(x, y, z, t) represents temperature
* k represents thermal conductivity
* ∇² is the Laplace operator
#### 3.1.1 Numerical Solution
Numerical solutions to the heat conduction equation typically use the Finite Difference Method or the Finite Element Method.
**Finite Difference Method**
The Finite Difference Method discretizes partial differential equations into a system of algebraic equations. For the heat conduction equation, using the central difference scheme, we get:
```
(u(i+1, j, k, t) - u(i-1, j, k, t))/(2Δx) + (u(i, j+1, k, t) - u(i-1, j, k, t))/(2Δy) + (u(i, j, k+1, t) - u(i, j, k-1, t))/(2Δz) = k/(ρc)(u(i, j, k, t+Δt) - u(i, j, k, t))/(Δt)
```
where:
* Δx, Δy, Δz, Δt are the spatial and temporal step sizes, respectively
* ρ is density
* c is specific heat capacity
**Finite Element Method**
The Finite Element Method divides the solution domain into finite elements and approximates the solution within each finite element using approximate functions. For the heat conduction equation, the weighted residual method can be used to obtain:
```
∫Ω(∂u/∂t)v dΩ + ∫Ωk∇u·∇v dΩ = 0
```
where:
* Ω is the solution domain
* v is the weighting function
#### 3.1.2 Analytical Solution
In some cases, the heat conduction equation can be solved analytically. For example, the one-dimensional steady-state heat conduction equation:
```
d²u/dx² = 0
```
The analytical solution is:
```
u(x) = C₁x + C₂
```
where C₁ and C₂ are constants.
### 3.2 Wave Equation
The wave equation describes the process of wave propagation within a medium. Its general form is:
```
∂²u/∂t² = c²∇²u
```
where:
* u(x, y, z, t) represents the displacement of the wave
* c represents wave speed
#### 3.2.1 Numerical Solution
Numerical solutions to the wave equation typically use the Finite Difference Method or the Finite Element Method.
**Finite Difference Method**
For the wave equation, using the central difference scheme, we get:
```
(u(i, j, k, t+Δt) - 2u(i, j, k, t) + u(i, j, k, t-Δt))/(Δt²) = c²/(Δx² + Δy² + Δz²)(u(i+1, j, k, t) + u(i-1, j, k, t) + u(i, j+1, k, t) + u(i, j-1, k, t) + u(i, j, k+1, t) + u(i, j, k-1, t) - 6u(i, j, k, t))
```
#### 3.2.2 Analytical Solution
In some cases, the wave equation can be solved analytically. For example, the one-dimensional wave equation:
```
∂²u/∂t² = c²∂²u/∂x²
```
The analytical solution is:
```
u(x, t) = f(x - ct) + g(x + ct)
```
where f and g are arbitrary functions.
### 3.3 Laplace's Equation
Laplace's equation describes the distribution of scalar fields such as electric potential or temperature. Its general form is:
```
∇²u = 0
```
#### 3.3.1 Numerical Solution
Numerical solutions to Laplace's equation typically use the Finite Difference Method or the Finite Element Method.
**Finite Difference Method**
For Laplace's equation, using the central difference scheme, we get:
```
(u(i+1, j, k) + u(i-1, j, k) + u(i, j+1, k) + u(i, j-1, k) + u(i, j, k+1, k) - 6u(i, j, k))/(Δx² + Δy² + Δz²) = 0
```
#### 3.3.2 Analytical Solution
In some cases, Laplace's equation can be solved analytically. For example, the two-dimensional Laplace's equation:
```
∂²u/∂x² + ∂²u/∂y² = 0
```
The analytical solution is:
```
u(x, y) = C₁sin(x) + C₂cos(x) + C₃sin(y) + C₄cos(y)
```
where C₁, C₂, C₃, C₄ are constants.
# 4. Advanced Techniques for Solving Partial Differential Equations
After mastering the basic solving methods, we can delve into more advanced techniques for solving partial differential equations to deal with more complex situations.
### 4.1 Nonlinear Partial Differential Equations
Nonlinear partial differential equations are nonlinear equations in which the unknown function and its derivatives appear in a nonlinear way. These equations are usually difficult to solve and require specialized numerical or analytical techniques.
**4.1.1 Numerical Solution**
***Finite Difference Method:** Discretize the partial differential equation into a set of algebraic equations and then solve using iterative methods.
***Finite Element Method:** Divide the solution domain into a finite number of cells and then use approximate functions to represent the unknown function within each cell.
***Spectral Method:** Expand the unknown function using orthogonal functions (such as Fourier series) and then solve a set of linear algebraic equations.
**Code Block:**
```python
import numpy as np
from scipy.sparse import diags
from scipy.sparse.linalg import spsolve
# Define the nonlinear partial differential equation
def f(u, du_dx):
return u**2 * du_dx
# Set boundary conditions
u_left = 0
u_right = 1
# Set grid parameters
n = 100
dx = (u_right - u_left) / (n - 1)
x = np.linspace(u_left, u_right, n)
# Construct the tridiagonal matrix
A = diags([1, -2, 1], [-1, 0, 1], shape=(n, n))
# Construct the right-hand side vector
b = np.zeros(n)
for i in range(1, n - 1):
b[i] = f(u[i], (u[i + 1] - u[i - 1]) / (2 * dx))
# Solve the linear system
u = spsolve(A, b)
```
**Logical Analysis:**
* The `f(u, du_dx)` function defines the nonlinear partial differential equation.
* `u_left` and `u_right` set the boundary conditions.
* `n` and `dx` define the grid parameters.
* `A` is the tridiagonal matrix representing the discretization of the partial differential equation.
* `b` is the right-hand side vector containing the nonlinear terms.
* The `spsolve()` function uses a sparse matrix solver to solve the linear system, obtaining the numerical solution for the unknown function `u`.
**4.1.2 Analytical Solution**
***Method of Separation of Variables:** Represent the unknown function as a product of two or more variables and then solve the equation for each variable separately.
***Method of Characteristics:** Solve the equation along characteristic lines, which are the trajectories of the unknown function in a specific direction.
***Variational Method:** Use variational principles to transform the partial differential equation into a problem of minimizing a functional.
### 4.2 Stochastic Partial Differential Equations
Stochastic partial differential equations contain random variables or stochastic processes, which complicates the solving process.
**4.2.1 Numerical Solution**
***Monte Carlo Method:** Use random sampling to approximate the solution to the partial differential equation.
***Finite Element Stochastic Galerkin Method:** Discretize the stochastic partial differential equation into a set of stochastic algebraic equations and then solve using the Monte Carlo method.
**4.2.2 Analytical Solution**
***Itô Formula:** Used to solve stochastic partial differential equations that result in stochastic differential equations.
***Markov Process:** Used to describe the stochastic processes of stochastic partial differential equations.
### 4.3 High-Dimensional Partial Differential Equations
High-dimensional partial differential equations involve multiple spatial variables, making the solving process more challenging.
**4.3.1 Numerical Solution**
***Finite Difference Method:** Discretize high-dimensional partial differential equations into a set of high-dimensional algebraic equations and then solve using iterative methods.
***Finite Element Method:** Divide the high-dimensional solution domain into a finite number of cells and then use approximate functions to represent the unknown function within each cell.
**4.3.2 Analytical Solution**
***Method of Separation of Variables:** Represent the unknown function as a product of multiple variables and then solve the equation for each variable separately.
***Eigenvalue Decomposition:** Decompose the high-dimensional partial differential equation into a set of eigenvalue problems and then solve the solution for each eigenvalue problem.
# 5. Best Practices for Solving Partial Differential Equations
### 5.1 Model Selection
Choosing the appropriate partial differential equation model is crucial for obtaining accurate solutions. The model should adequately describe the physical or mathematical problem while being simple enough to solve.
### 5.2 Solver Selection
There are various choices for solvers to solve partial differential equations. The choice of an appropriate solver depends on the type of equation, the required accuracy of the solution, and the available computational resources.
- **Numerical Solvers:**
- Finite Difference Method: Easy to use, suitable for regular grids.
- Finite Element Method: Suitable for complex geometries.
- Spectral Method: High accuracy, but computationally expensive.
- **Analytical Solvers:**
- Method of Separation of Variables: Suitable for equations with specific symmetries.
- Method of Characteristics: Suitable for first-order partial differential equations.
- Variational Method: Suitable for equations that involve minimizing an energy functional.
### 5.3 Results Verification and Analysis
After solving partial differential equations, it is important to verify and analyze the results. This includes:
- **Comparison with Analytical Solutions or Experimental Data:** If known analytical solutions or experimental data exist, then the solution results can be compared with them.
- **Mesh Convergence Study:** For numerical solutions, evaluate the accuracy of the solution by progressively refining the mesh and checking for convergence.
- **Physical Meaning Check:** The solution results should conform to the expected behavior of the physical or mathematical problem.

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
AMESim液压仿真秘籍:专家级技巧助你从基础飞跃至顶尖水平

# 摘要
AMESim液压仿真软件是工程师们进行液压系统设计与分析的强大工具,它通过图形化界面简化了模型建立和仿真的流程。本文旨在为用户提供AMESim软件的全面介绍,从基础操作到高级技巧,再到项目实践案例分析,并对未来技术发展趋势进行展望。文中详细说明了AMESim的安装、界面熟悉、基础和高级液压模型的建立,以及如何运行、分析和验证仿真结果。通过探索自定义组件开发、多学科仿真集成以及高级仿真算法的应用,本文
【高频领域挑战】:VCO设计在微波工程中的突破与机遇
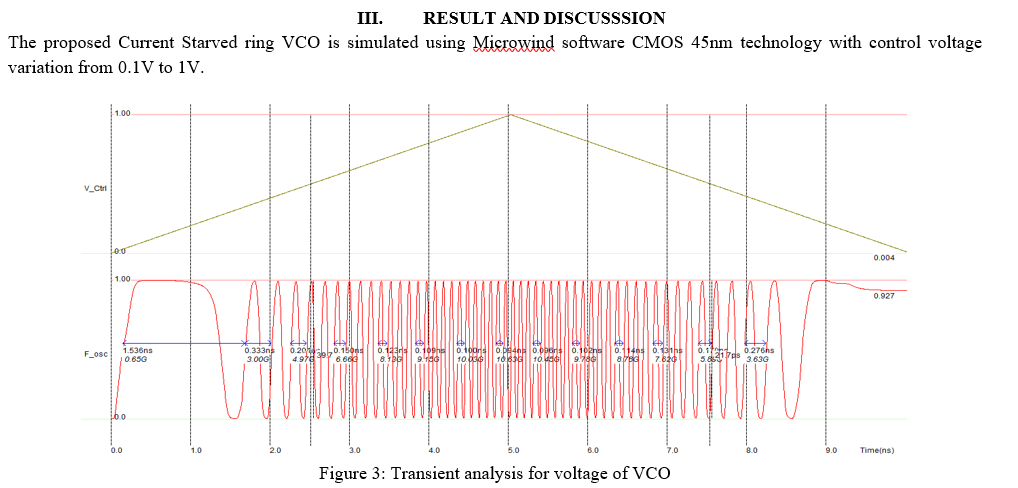
# 摘要
本论文深入探讨了压控振荡器(VCO)的基础理论与核心设计原则,并在微波工程的应用技术中展开详细讨论。通过对VCO工作原理、关键性能指标以及在微波通信系统中的作用进行分析,本文揭示了VCO设计面临的主要挑战,并提出了相应的技术对策,包括频率稳定性提升和噪声性能优化的方法。此外,论文还探讨了VCO设计的实践方法、案例分析和故障诊断策略,最后对VCO设计的创新思路、新技术趋势及未来发展挑战
实现SUN2000数据采集:MODBUS编程实践,数据掌控不二法门
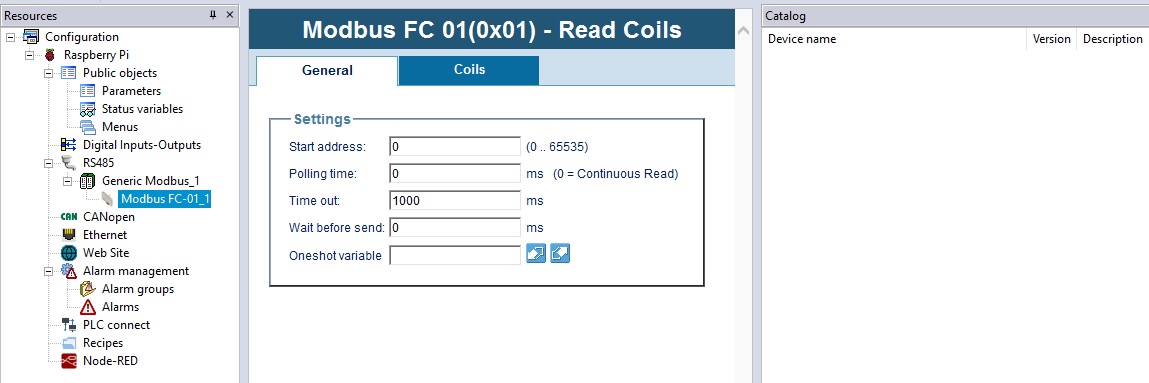
# 摘要
本文系统地介绍了MODBUS协议及其在数据采集中的应用。首先,概述了MODBUS协议的基本原理和数据采集的基础知识。随后,详细解析了MODBUS协议的工作原理、地址和数据模型以及通讯模式,包括RTU和ASCII模式的特性及应用。紧接着,通过Python语言的MODBUS库,展示了MODBUS数据读取和写入的编程实践,提供了具体的实现方法和异常管理策略。本文还结合SUN20
【性能调优秘籍】:深度解析sco506系统安装后的优化策略
# 摘要
本文对sco506系统的性能调优进行了全面的介绍,首先概述了性能调优的基本概念,并对sco506系统的核心组件进行了介绍。深入探讨了核心参数调整、磁盘I/O、网络性能调优等关键性能领域。此外,本文还揭示了高级性能调优技巧,包括CPU资源和内存管理,以及文件系统性能的调整。为确保系统的安全性能,文章详细讨论了安全策略、防火墙与入侵检测系统的配置,以及系统审计与日志管理的优化。最后,本文提供了系统监控与维护的
网络延迟不再难题:实验二中常见问题的快速解决之道
# 摘要
网络延迟是影响网络性能的重要因素,其成因复杂,涉及网络架构、传输协议、硬件设备等多个方面。本文系统分析了网络延迟的成因及其对网络通信的影响,并探讨了网络延迟的测量、监控与优化策略。通过对不同测量工具和监控方法的比较,提出了针对性的网络架构优化方案,包括硬件升级、协议配置调整和资源动态管理等。
期末考试必备:移动互联网商业模式与用户体验设计精讲

# 摘要
移动互联网的迅速发展带动了商业模式的创新,同时用户体验设计的重要性日益凸显。本文首先概述了移动互联网商业模式的基本概念,接着深入探讨用户体验设计的基础,包括用户体验的定义、重要性、用户研究方法和交互设计原则。文章重点分析了移动应用的交互设计和视觉设计原则,并提供了设计实践案例。之后,文章转向移动商业模式的构建与创新,探讨了商业模式框架
【多语言环境编码实践】:在各种语言环境下正确处理UTF-8与GB2312
# 摘要
随着全球化的推进和互联网技术的发展,多语言环境下的编码问题变得日益重要。本文首先概述了编码基础与字符集,随后深入探讨了多语言环境所面临的编码挑战,包括字符编码的重要性、编码选择的考量以及编码转换的原则和方法。在此基础上,文章详细介绍了UTF-8和GB2312编码机制,并对两者进行了比较分析。此外,本文还分享了在不同编程语言中处理编码的实践技巧,
【数据库在人事管理系统中的应用】:理论与实践:专业解析
# 摘要
本文探讨了人事管理系统与数据库的紧密关系,分析了数据库设计的基础理论、规范化过程以及性能优化的实践策略。文中详细阐述了人事管理系统的数据库实现,包括表设计、视图、存储过程、触发器和事务处理机制。同时,本研究着重讨论了数据库的安全性问题,提出认证、授权、加密和备份等关键安全策略,以及维护和故障处理的最佳实践。最后,文章展望了人事管理系统的发展趋
【Docker MySQL故障诊断】:三步解决权限被拒难题
# 摘要
随着容器化技术的广泛应用,Docker已成为管理MySQL数据库的流行方式。本文旨在对Docker环境下MySQL权限问题进行系统的故障诊断概述,阐述了MySQL权限模型的基础理论和在Docker环境下的特殊性。通过理论与实践相结合,提出了诊断权限问题的流程和常见原因分析。本文还详细介绍了如何利用日志文件、配置检查以及命令行工具进行故障定位与修复,并探讨了权限被拒问题的解决策略和预防措施
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )