【强化学习在金融领域的应用】:算法交易的新策略与实践案例
发布时间: 2024-09-02 14:52:45 阅读量: 14 订阅数: 21 
# 1. 强化学习在金融领域的基础理论
金融领域作为现代社会经济的基石,其决策过程的复杂性与高度的不确定性为强化学习技术的应用提供了广阔的舞台。在本章中,我们将探讨强化学习在金融领域的基本原理和理论框架,为后续章节深入分析强化学习在金融市场交易、风险管理以及策略优化中的具体应用奠定坚实的基础。
## 1.1 强化学习概述
强化学习是一种机器学习范式,旨在通过与环境的交互来学习如何根据环境状态作出决策以最大化某种累计奖励。在金融领域,这一范式可以被用来设计智能的交易系统或优化投资策略。
## 1.2 金融市场中的强化学习
金融市场本质上是一个动态且非平稳的环境。强化学习在金融市场中的应用,可以捕捉到市场的即时变化,并通过奖励机制来学习和适应这种变化,从而在投资决策中取得优势。
## 1.3 金融决策中的强化学习模型
在金融决策过程中,强化学习模型能够通过试错的方式寻找最优策略。例如,在构建交易策略时,强化学习可以评估不同交易行为对长期收益的影响,并据此优化决策过程。
接下来章节将深入探讨强化学习的核心算法及其在金融市场中的具体应用,并讨论其中所面临的技术挑战和未来的发展趋势。
# 2. 强化学习的核心算法与模型
## 2.1 强化学习算法概述
### 2.1.1 标准化强化学习模型
强化学习模型通常由环境(Environment)、智能体(Agent)、状态(State)、动作(Action)和奖励(Reward)五个基本要素构成。智能体通过与环境交互学习最优策略,以达到最大化累积奖励的目标。在标准化的强化学习模型中,一个明确的决策过程被定义为一个马尔可夫决策过程(Markov Decision Process, MDP),其中包含以下关键元素:
- 状态空间(S):所有可能的状态的集合。
- 动作空间(A):所有可能动作的集合。
- 转移概率(P):状态转移函数P(s'|s,a),表示从当前状态s执行动作a后转移到状态s'的概率。
- 奖励函数(R):奖励函数R(s,a,s'),表示从状态s执行动作a后转移到状态s'所得到的即时奖励。
- 折扣因子(γ):未来的奖励需要进行折扣以计算现值,折扣因子γ ∈ [0, 1]。
一个典型的强化学习循环可以表示为:智能体从环境中观察当前状态,根据当前策略选择一个动作,执行该动作后环境转移到新的状态并给智能体一个奖励。智能体的目标是通过不断的学习找到最优策略π*,使得在所有可能的策略中,从初始状态开始的累积奖励期望值最大。
```mermaid
graph LR
A[开始] --> B[观察状态 S]
B --> C[选择动作 A]
C --> D[执行动作 A]
D --> E[环境转移到新状态 S']
E --> F[获取奖励 R]
F --> B
style B stroke:#f66,stroke-width:2px
```
在上述的流程中,如何高效地学习策略π并持续地优化它以最大化长期奖励,是强化学习的核心问题。
### 2.1.2 关键算法组件解析
强化学习算法的关键组件包含策略(Policy)、价值函数(Value Function)和模型(Model)。其中,策略π定义了在给定状态下智能体如何选择动作的规则,价值函数则用来估计从某个状态开始的预期回报,而模型是对环境状态转移和奖励的预测。
#### 策略
策略通常可以是确定性的,也可以是随机性的。确定性策略π直接为每个状态指派一个动作,而随机性策略π则为每个状态指派一个动作的概率分布。在大多数算法中,策略的改善是通过与环境的交互,以及通过价值函数的反馈来实现的。
#### 价值函数
价值函数是评估智能体在特定状态下或者状态-动作对下,预期累积回报的函数。最常见的是状态价值函数(V(s))和动作价值函数(Q(s, a)),分别表示智能体在状态s下或者在状态s执行动作a下的预期回报。
#### 模型
在模型强化学习中,模型是对环境状态转移和奖励的预测。它可以用于模拟环境的行为,使得算法可以进行“思考”并计划未来的动作,而无需与真实环境进行交互。然而,在大多数金融领域应用中,环境往往过于复杂或难以建模,导致模型强化学习的应用受到限制。
## 2.2 深度强化学习进展
### 2.2.1 深度Q网络(DQN)
深度Q网络(Deep Q Network, DQN)是将深度学习与Q学习相结合的一种突破性方法,它成功解决了高维状态空间的强化学习问题。DQN通过使用深度神经网络来近似Q值函数,使得它能够处理复杂的输入,如图像数据。
DQN的关键改进包括:
- 使用经验回放(Experience Replay):通过随机采样以往的经验来打破数据间的时间相关性,提高学习的稳定性。
- 目标网络(Target Network):维持一个稳定的网络(称为目标网络)用于计算目标Q值,减少学习过程中的波动。
- 函数近似:使用深度神经网络来近似Q值函数,处理高维的、连续的状态空间。
DQN的伪代码如下:
```python
Initialize replay memory D to capacity N
Initialize action-value function Q with random weights
Repeat
for episode = 1, M do
Initialize sequence s_1 = {x_1} and preprocessed sequence φ_1 = φ(s_1)
for t = 1, T do
With probability ϵ select a random action a_t, otherwise select a_t = argmax_a Q(φ(s_t), a; θ_i)
Execute action a_t in emulator and observe reward r_t and image x_{t+1}
Set s_{t+1} = s_t, a_t, x_{t+1} and preprocess φ_{t+1} = φ(s_{t+1})
Store transition (φ_t, a_t, r_t, φ_{t+1}) in D
Sample random minibatch of transitions (φ_j, a_j, r_j, φ_{j+1}) from D
Set y_j = r_j if episode terminates at step j+1
otherwise set y_j = r_j + γ max_a' Q(φ_{j+1}, a'; θ_i)
Perform a gradient descent step on (y_j - Q(φ_j, a_j; θ))^2 with respect to the network parameters θ
end for
end for
Until convergence
```
其中,Q是通过神经网络实现的Q值函数,θ是神经网络的参数,θ_i表示第i次迭代的参数值,y_j是目标Q值,目标Q值计算取决于是否达到终止状态。DQN通过这种方法,可以在复杂的环境中实现有效的学习和决策。
### 2.2.2 策略梯度方法
策略梯度方法(Policy Gradient Methods)是一类强化学习算法,它的核心思想是直接在策略空间中进行优化,通过梯度上升的方式直接调整策略参数以最大化期望回报。策略梯度方法不依赖于价值函数的估计,因此避免了值函数估计中的一些问题,如高方差和过估计等。
策略梯度的数学表达式通常写作:
$$ \nabla_\theta J(\theta) = \mathbb{E}_{s \sim \rho^\beta, a \sim \pi_\theta}[ \nabla_\theta log \pi_\theta(a|s) \hat{Q}(s,a)] $$
其中,J(θ)表示目标函数,ρ^β是状态的分布,π_θ是策略参数θ下的策略,hat{Q}(s,a)是利用当前策略评估的动作价值。
REINFORCE算法是策略梯度方法的一个基础实例,它使用蒙特卡罗方法估计策略梯度。更复杂的方法如信任区域策略优化(Trust Region Policy Optimization, TRPO)和近端策略优化(Proximal Policy Optimization, PPO)在REINFORCE的基础上加入了额外的约束来提高训练的稳定性和收敛速度。
### 2.2.3 异步优势演员-评论家(A3C)
异步优势演员-评论家(Asynchronous Advantage Actor-Critic, A3C)结合了演员-评论家(Actor-Critic)方法和异步训练的优点。A3C的核心是训练两个神经网络:一个用于学习策略(称为“演员”),另一个用于学习价值函数(称为“评论家”)。优势函数表示了某个动作相对于平均动作的优势,这个概念使得学习更加高效。
A3C通过多个异步的、并行的智能体来收集经验,并在共享的全局参数更新过程中使用这些经验。每个智能体在自己的环境中独立地进行训练,并定期更新到共享的全局网络中,从而实现了高效的样本利用率和快速的收敛速度。
A3C的伪代码如下:
```python
def worker(i, shared_model):
while True:
reset梯度梯度缓存
s = env.reset()
while not episode_终止:
a_t, v_t = policy.forward(shared_model, s)
s', r_t = env.step(a_t)
delta_t = r_t + γ * v' - v_t
policy.zero_grad()
policy.backward(delta_t + β * advantages * log(π(a_t|s_t)))
value.zero_grad()
(r_t + γ * v' - v_t).backward()
write梯度到共享模型
s = s'
accumulate步骤
num_workers = ...
shared_model = ...
workers = [start_new_thread(worker, (i, shared_model)) for i in range(num_workers)]
```
在该伪代码中,`shared_model`代表全局共享的模型,`worker`函数代表每个独立工作线程的行为。`policy`和`value`代表策略和价值网络。这种方法通过多个工作线程并行学习,同时利用梯度的累积更新共享模型,大大提高了学习效率。
## 2.3 算法优化与挑战
### 2.3.1 算法稳定性与收敛性问题
在深度强化学习中,算法的稳定性和收敛性是核心挑战。由于神经网络的非线性和复杂的优化过程,传统的梯度下降方法经常会导致训练的不稳定和震荡。此外,深度强化学习算法容易过拟合,尤其是在样本量有限的情况下。
为了解决这些问题,研究者们提出了一系列优化技术和方法:
- **经验回放(Experience Replay)**:通过存储智能体在环境中的交互经验,并在训练过程中随机抽取这些经验,从而打破了数据之间的相关性,减少了学习过程中的方差。
- **目标网络(Target Network)**:在DQN中引入了一个
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了强化学习算法的基本原理,涵盖了其在游戏、模拟环境、推荐系统、资源管理和电力系统等领域的广泛应用。专栏深入分析了强化学习算法的稳定性和收敛性,并提供了基于模型的强化学习的进阶技巧。此外,还提供了构建和优化模拟环境的权威指南,阐述了强化学习在个性化推荐和动态资源分配中的创新应用。通过对理论、实践和应用的全面探讨,本专栏为读者提供了强化学习算法的全面理解,并展示了其在解决现实世界问题中的强大潜力。
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【Python集合异常处理攻略】:集合在错误控制中的有效策略
# 1. Python集合的基础知识
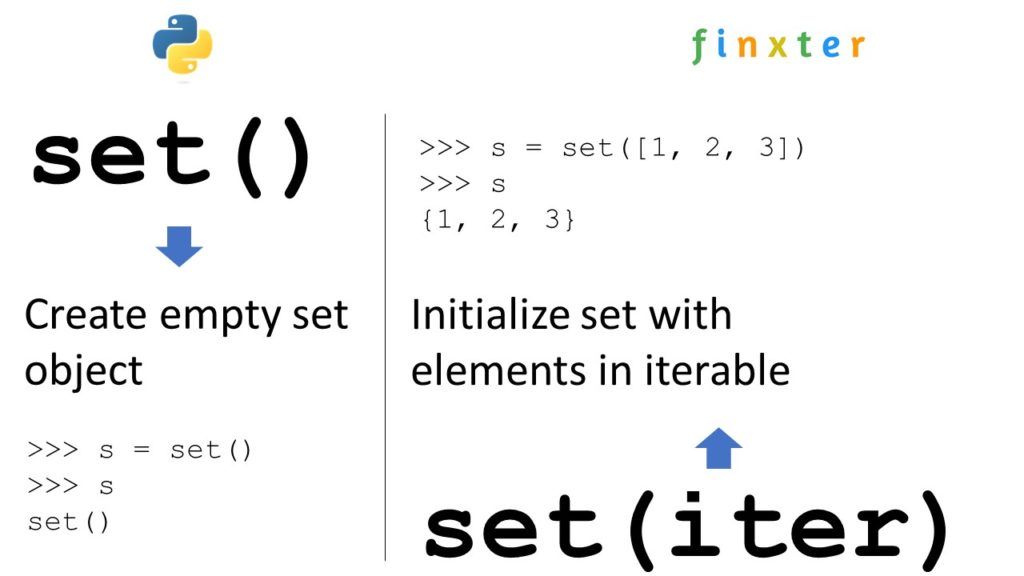
Python集合是一种无序的、不重复的数据结构,提供了丰富的操作用于处理数据集合。集合(set)与列表(list)、元组(tuple)、字典(dict)一样,是Python中的内置数据类型之一。它擅长于去除重复元素并进行成员关系测试,是进行集合操作和数学集合运算的理想选择。
集合的基础操作包括创建集合、添加元素、删除元素、成员测试和集合之间的运
Python版本与性能优化:选择合适版本的5个关键因素

# 1. Python版本选择的重要性
Python是不断发展的编程语言,每个新版本都会带来改进和新特性。选择合适的Python版本至关重要,因为不同的项目对语言特性的需求差异较大,错误的版本选择可能会导致不必要的兼容性问题、性能瓶颈甚至项目失败。本章将深入探讨Python版本选择的重要性,为读者提供选择和评估Python版本的决策依据。
Python的版本更新速度和特性变化需要开发者们保持敏锐的洞
Python print语句装饰器魔法:代码复用与增强的终极指南

# 1. Python print语句基础
## 1.1 print函数的基本用法
Python中的`print`函数是最基本的输出工具,几乎所有程序员都曾频繁地使用它来查看变量值或调试程序。以下是一个简单的例子来说明`print`的基本用法:
```python
print("Hello, World!")
```
这个简单的语句会输出字符串到标准输出,即你的控制台或终端。`prin
【Python字典的并发控制】:确保数据一致性的锁机制,专家级别的并发解决方案
# 1. Python字典并发控制基础
在本章节中,我们将探索Python字典并发控制的基础知识,这是在多线程环境中处理共享数据时必须掌握的重要概念。我们将从了解为什么需要并发控制开始,然后逐步深入到Python字典操作的线程安全问题,最后介绍一些基本的并发控制机制。
## 1.1 并发控制的重要性
在多线程程序设计中
Python数组在科学计算中的高级技巧:专家分享

# 1. Python数组基础及其在科学计算中的角色
数据是科学研究和工程应用中的核心要素,而数组作为处理大量数据的主要工具,在Python科学计算中占据着举足轻重的地位。在本章中,我们将从Python基础出发,逐步介绍数组的概念、类型,以及在科学计算中扮演的重要角色。
## 1.1 Python数组的基本概念
数组是同类型元素的有序集合,相较于Python的列表,数组在内存中连续存储,允
Python函数调用栈分析:追踪执行流程,优化函数性能的6个技巧

# 1. 函数调用栈基础
函数调用栈是程序执行过程中用来管理函数调用关系的一种数据结构,它类似于一叠盘子的堆栈,记录了程序从开始运行到当前时刻所有函数调用的序列。理解调用栈对于任何希望深入研究编程语言内部运行机制的开发者来说都是至关重要的,它能帮助你解决函数调用顺序混乱、内存泄漏以及性能优化等问题。
## 1.1 什么是调用栈
调用栈是一个后进先出(LIFO)的栈结构,用于记录函数调用的顺序和执行环境。
Python装饰模式实现:类设计中的可插拔功能扩展指南
# 1. Python装饰模式概述
装饰模式(Decorator Pattern)是一种结构型设计模式,它允许动态地添加或修改对象的行为。在Python中,由于其灵活性和动态语言特性,装饰模式得到了广泛的应用。装饰模式通过使用“装饰者”(Decorator)来包裹真实的对象,以此来为原始对象添加新的功能或改变其行为,而不需要修改原始对象的代码。本章将简要介绍Python中装饰模式的概念及其重要性,为理解后
Python pip性能提升之道
# 1. Python pip工具概述
Python开发者几乎每天都会与pip打交道,它是Python包的安装和管理工具,使得安装第三方库变得像“pip install 包名”一样简单。本章将带你进入pip的世界,从其功能特性到安装方法,再到对常见问题的解答,我们一步步深入了解这一Python生态系统中不可或缺的工具。
首先,pip是一个全称“Pip Installs Pac
【递归与迭代决策指南】:如何在Python中选择正确的循环类型
# 1. 递归与迭代概念解析
## 1.1 基本定义与区别
递归和迭代是算法设计中常见的两种方法,用于解决可以分解为更小、更相似问题的计算任务。**递归**是一种自引用的方法,通过函数调用自身来解决问题,它将问题简化为规模更小的子问题。而**迭代**则是通过重复应用一系列操作来达到解决问题的目的,通常使用循环结构实现。
## 1.2 应用场景
递归算法在需要进行多级逻辑处理时特别有用,例如树的遍历和分治算法。迭代则在数据集合的处理中更为常见,如排序算法和简单的计数任务。理解这两种方法的区别对于选择最合适的算法至关重要,尤其是在关注性能和资源消耗时。
## 1.3 逻辑结构对比
递归
Pandas中的文本数据处理:字符串操作与正则表达式的高级应用
# 1. Pandas文本数据处理概览
Pandas库不仅在数据清洗、数据处理领域享有盛誉,而且在文本数据处理方面也有着独特的优势。在本章中,我们将介绍Pandas处理文本数据的核心概念和基础应用。通过Pandas,我们可以轻松地对数据集中的文本进行各种形式的操作,比如提取信息、转换格式、数据清洗等。
我们会从基础的字
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )