Matlab Axis Translation Guide: Optimizing Layout, Enhancing Data Readability
发布时间: 2024-09-13 22:32:15 阅读量: 33 订阅数: 33 

MATLAB 绘图复刻五:带树状图的环形热图
# 1. An Overview of Axis Translation in Matlab
Axis translation is an important graphical operation in Matlab that allows users to adjust the range and position of the axes, providing a better display of the data. By translating axes, users can control the way data is displayed on the graph, thereby optimizing the data visualization effect and improving data readability.
There are multiple methods to achieve axis translation, including the use of `xlim()` and `ylim()` functions, `set()` function, and `axis()` function. These functions offer different parameters and options, enabling users to customize axis translation operations according to specific needs.
# 2. Theoretical Foundation of Axis Translation
### 2.1 Coordinate Systems and Transformation Matrices
**Coordinate Systems**
A coordinate system is a mathematical tool used to describe spatial positions, consisting of an origin and a set of basis vectors. In two-dimensional space, the Cartesian coordinate system is commonly used, with its origin at `(0, 0)` and its basis vectors being the `x` and `y` axes.
**Transformation Matrices**
A transformation matrix is a mathematical tool used to perform operations such as translation, rotation, and scaling on a coordinate system. The expression for a two-dimensional translation transformation matrix `T` is as follows:
```
T = [1 0 tx;
0 1 ty;
0 0 1]
```
Here, `tx` and `ty` represent the translation distances along the `x` and `y` axes, respectively.
### 2.2 Mathematical Principles of Translation Transformation
Translation transformation refers to the operation of translating the coordinate system by a certain distance in a specified direction. The mathematical principle is as follows:
Let point `P(x, y)` be in the original coordinate system, and let point `P'(x', y')` be in the translated coordinate system. The coordinates after translation are:
```
x' = x + tx
y' = y + ty
```
where `tx` and `ty` are the translation distances.
Translation transformation can be achieved by multiplying the transformation matrix `T` by the homogeneous coordinates `[x, y, 1]` of point `P` in the original coordinate system:
```
[x', y', 1] = [x, y, 1] * T
```
**Code Block 1: Mathematical Principles of Translation Transformation**
```matlab
% Point in the original coordinate system
x = 2;
y = 3;
% Translation distances
tx = 1;
ty = 2;
% Transformation matrix
T = [1 0 tx;
0 1 ty;
0 0 1];
% Translation transformation
P_prime = [x, y, 1] * T;
% Output the translated coordinates
disp('Translated coordinates:');
disp(P_prime);
```
**Logical Analysis:**
This code demonstrates the mathematical principles of translation transformation. It first defines the point `P` in the original coordinate system and the translation distances `tx` and `ty`. Then, it creates the transformation matrix `T`. Finally, it multiplies `P` by `T` to obtain the translated coordinates `P'`.
**Parameter Description:**
* `x`: x-coordinate of the point in the original coordinate system
* `y`: y-coordinate of the point in the original coordinate system
* `tx`: Translation distance along the x-axis
* `ty`: Translation distance along the y-axis
* `T`: Transformation matrix
* `P_prime`: Translated coordinates
# 3.1 Translating Axes Using xlim() and ylim() Functions
The `xlim()` and `ylim()` functions are used in Matlab to set the range of the x-axis and y-axis of the axes. By modifying the parameters of these functions, axis translation can be achieved.
**xlim() Function**
The syntax of the `xlim()` function is:
```
xlim([xmin xmax])
```
Here,

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
WLC3504配置实战手册:无线安全与网络融合的终极指南

# 摘要
WLC3504无线控制器作为网络管理的核心设备,在保证网络安全、配置网络融合特性以及进行高级网络配置方面扮演着关键角色。本文首先概述了WLC3504无线控制器的基本功能,然后深入探讨了其无线安全配置的策略和高级安全特性,包括加密、认证、访问控制等。接着,文章分析了网络融合功能,解释了无线与有线网络融合的理论与配置方法,并讨论
【802.11协议深度解析】RTL8188EE无线网卡支持的协议细节大揭秘

# 摘要
无线通信技术是现代社会信息传输的重要基础设施,其中802.11协议作为无线局域网的主要技术标准,对于无线通信的发展起到了核心作用。本文从无线通信的基础知识出发,详细介绍了802.11协议的物理层和数据链路层技术细节,包括物理层传输媒介、标准和数据传输机制,以及数据链路层的MAC地址、帧格式、接入控制和安全协议。同时,文章还探讨了RTL8188EE无线网
Allegro 172版DFM规则深入学习:掌握DFA Package spacing的实施步骤
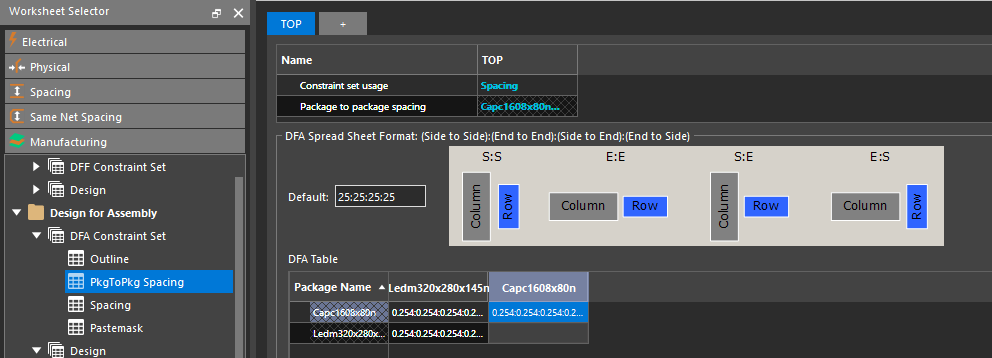
# 摘要
本文围绕Allegro PCB设计与DFM规则,重点介绍了DFA Package Spacing的概念、重要性、行业标准以及在Allegro软件中的实施方法。文章首先定义了DFA Packag
【AUTOSAR TPS深度解析】:掌握TPS在ARXML中的5大应用与技巧

# 摘要
本文系统地介绍了AUTOSAR TPS(测试和验证平台)的基础和进阶应用,尤其侧重于TPS在ARXML(AUTOSAR扩展标记语言)中的使用。首先概述了TPS的基本概念,接着详细探讨了TPS在ARXML中的结构和组成、配置方法、验证与测试
【低频数字频率计设计核心揭秘】:精通工作原理与优化设计要点

# 摘要
数字频率计作为一种精确测量信号频率的仪器,其工作原理涉及硬件设计与软件算法的紧密结合。本文首先概述了数字频率计的工作原理和测量基础理论,随后详细探讨了其硬件设计要点,包括时钟源选择、计数器和分频器的使用、高精度时钟同步技术以及用户界面和通信接口设计。在软件设计与算法优化方面,本文分析了不同的测量算法以
SAP用户管理精进课:批量创建技巧与权限安全的黄金平衡

# 摘要
随着企业信息化程度的加深,有效的SAP用户管理成为确保企业信息安全和运营效率的关键。本文详细阐述了SAP用户管理的各个方面,从批量创建用户的技术和方法,到用户权限分配的艺术,再到权限安全与合规性的要求。此外,还探讨了在云和移动环境下的用户管理高级策略,并通过案例研究来展示理论在实践中的应用。文章旨在为SAP系统管理员提供一套全面的用户管理解决方案,帮助他们优化管理流程,提
【引擎选择秘籍】《弹壳特攻队》挑选最适合你的游戏引擎指南
# 摘要
本文全面分析了游戏引擎的基本概念与分类,并深入探讨了游戏引擎技术核心,包括渲染技术、物理引擎和音效系统等关键技术组件。通过对《弹壳特攻队》游戏引擎实战案例的研究,本文揭示了游戏引擎选择和定制的过程,以及如何针对特定游戏需求进行优化和多平台适配。此外,本文提供了游戏引擎选择的标准与策略,强调了商业条款、功能特性以及对未来技术趋势的考量。通过案例分析,本
【指示灯识别的机器学习方法】:理论与实践结合
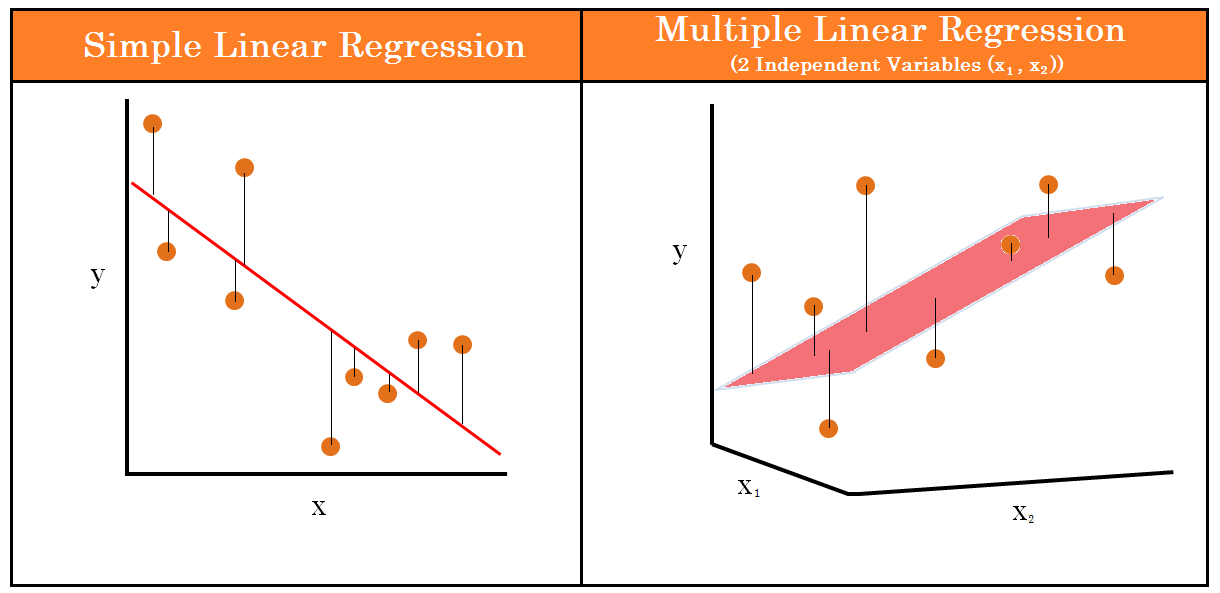
# 摘要
本文全面探讨了机器学习在指示灯识别中的应用,涵盖了基础理论、特征工程、机器学习模型及其优化策略。首先介绍了机器学习的基础和指示灯识别的重要性。随后,详细阐述了从图像处理到颜色空间分析的特征提取方法,以及特征选择和降维技术,结合实际案例分析和工具使用,展示了特征工程的实践过程。接着,讨论了传统和深度学习模
【卷积块高效实现】:代码优化与性能提升的秘密武器
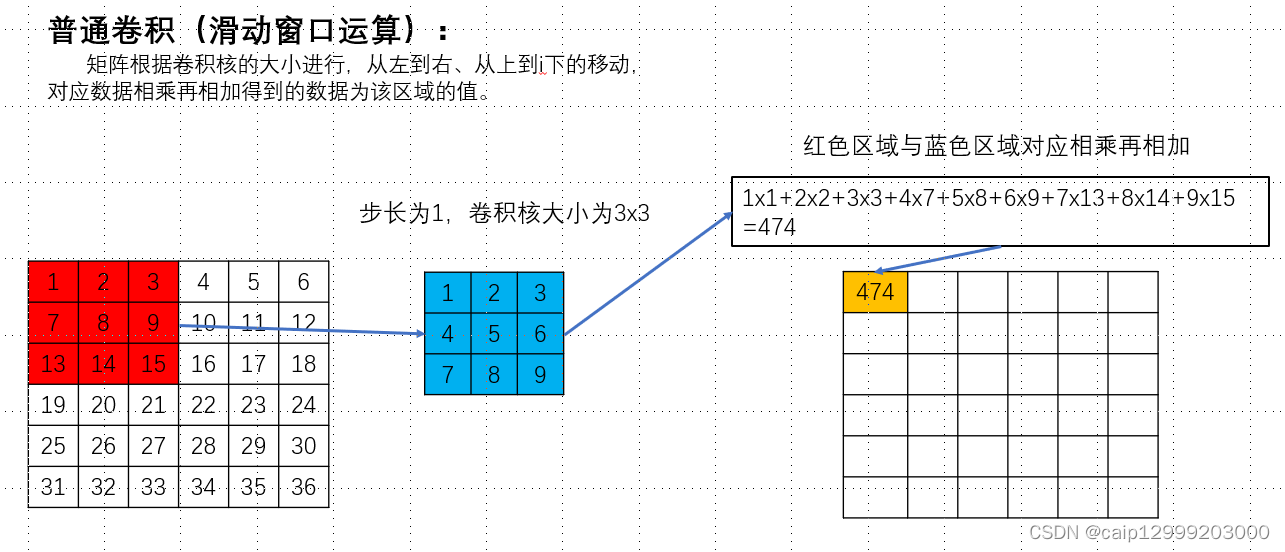
# 摘要
卷积神经网络(CNN)是深度学习领域的重要分支,在图像和视频识别、自然语言处理等方面取得了显著成果。本文从基础知识出发,深入探讨了卷积块的核心原理,包括其结构、数学模型、权重初始化及梯度问题。随后,详细介绍了卷积块的代码实现技巧,包括算法优化、编程框架选择和性能调优。性能测试与分析部分讨论了测试方法和实际应用中性能对比,以及优化策略的评估与选择。最后,展望了卷积块优化的未来趋势,包括新型架构、算法
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )