实时视频分析优化:CNN高效算法与硬件加速技术的结合
发布时间: 2024-11-20 16:42:25 阅读量: 69 订阅数: 21 

无缝集成:将DeepSORT嵌入视频分析系统的艺术
# 1. 实时视频分析的基础知识
实时视频分析是现代智能监控、自动驾驶、视频通话等领域不可或缺的技术之一。它涉及从原始视频流中提取有用信息并快速做出反应的能力。实时视频分析的核心目标是在尽量减少延迟的同时,准确理解视频内容,包括识别、跟踪、行为分析等。
## 1.1 视频分析流程简述
视频分析通常包括以下几个步骤:预处理(去噪、增强)、目标检测、特征提取、行为理解和决策制定。每个步骤都是实时视频分析系统不可或缺的组成部分。
## 1.2 关键技术与挑战
关键技术包括但不限于图像处理、机器学习、深度学习等。其中,深度学习中的卷积神经网络(CNN)由于其在图像识别方面的卓越性能,成为了实时视频分析领域内的核心算法。然而,实时性能的挑战仍然存在,包括算法的复杂度与计算资源的限制。优化这些算法以适应不同的硬件平台,是目前研究的热点。
```mermaid
graph TD;
A[视频分析流程] -->|预处理| B(预处理)
B -->|目标检测| C(目标检测)
C -->|特征提取| D(特征提取)
D -->|行为理解| E(行为理解)
E -->|决策制定| F[决策制定]
```
在接下来的章节中,我们将深入探讨CNN的架构、高效算法以及硬件加速技术,并分析它们如何协同工作以实现高效率的实时视频分析系统。
# 2. 卷积神经网络(CNN)基础与高效算法
## 2.1 CNN的基本原理和架构
### 2.1.1 卷积层、池化层、全连接层的作用与优化
卷积神经网络(CNN)是深度学习中一种应用广泛的网络结构,特别是在图像和视频分析领域。CNN的核心在于通过卷积层、池化层和全连接层的组合,提取输入数据的特征,并进行分类或回归分析。以下为这些关键层次的详细解读。
**卷积层**是CNN中最基础的构建模块,其作用是通过滤波器(或称为卷积核)在输入数据上进行卷积操作,以此提取局部特征。卷积层的优化通常涉及减少滤波器的数量、改变滤波器大小,以及应用不同类型的非线性激活函数,如ReLU(Rectified Linear Unit),以增加网络的非线性,提高特征提取能力。
```python
import torch.nn as nn
class ConvolutionalLayer(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0):
super(ConvolutionalLayer, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding)
def forward(self, x):
return self.conv(x) # 这里仅展示了前向传播函数
```
参数解释:
- `in_channels`: 输入数据的通道数,例如RGB图像的通道数为3。
- `out_channels`: 卷积核的数量,决定输出数据的通道数。
- `kernel_size`: 卷积核的大小,如3x3或5x5。
- `stride`: 卷积核移动的步长。
- `padding`: 边缘填充,保证输出尺寸的一致性。
卷积操作后通常会应用激活函数,常见的做法是使用ReLU激活函数,它能够帮助网络避免梯度消失的问题,并促进模型训练的效率。
**池化层**通过下采样减少特征图的尺寸,减少参数数量及计算量。池化操作包括最大池化(Max Pooling)和平均池化(Average Pooling)等。池化层优化通常涉及到池化核的大小调整。
**全连接层**在CNN的末端,用于对从前面卷积层提取的特征进行整合,并输出最终的分类结果或其他预测值。优化全连接层可以通过减少神经元的数量、正则化项(如L2惩罚项)以及使用dropout技术防止过拟合来实现。
### 2.1.2 常用的CNN模型及其特点
CNN模型历经数代发展,涌现了许多经典的模型,它们在不同类型的图像和视频处理任务中表现卓越。以下是几个著名的CNN模型及其特点的总结。
**LeNet-5**是最早的卷积神经网络之一,由Yann LeCun等人在1998年提出,主要用于手写数字识别任务。LeNet-5由交替的卷积层、池化层、全连接层组成,其结构虽然简单,但奠定了后续CNN发展的基础。
**AlexNet**在2012年ImageNet挑战赛中取得突破性成绩,标志着深度学习时代的来临。AlexNet由8层网络构成,包括5个卷积层和3个全连接层,使用ReLU激活函数,应用了局部响应归一化(Local Response Normalization, LRN)和Dropout正则化技术。
**VGGNet**通过重复使用简单的3x3卷积核,并将网络深度增加到16-19层,显著提升了图像分类的准确性。VGGNet强调了深度网络在提取复杂特征中的作用,但其缺点是参数众多,计算复杂。
**ResNet**(残差网络)引入了“残差学习”的概念,通过设计“跳跃连接”(skip connections)解决了深层网络训练时梯度消失的问题。ResNet能够在保持网络深度的同时提高训练的稳定性,使得网络可以达到百层以上。
## 2.2 高效CNN算法研究
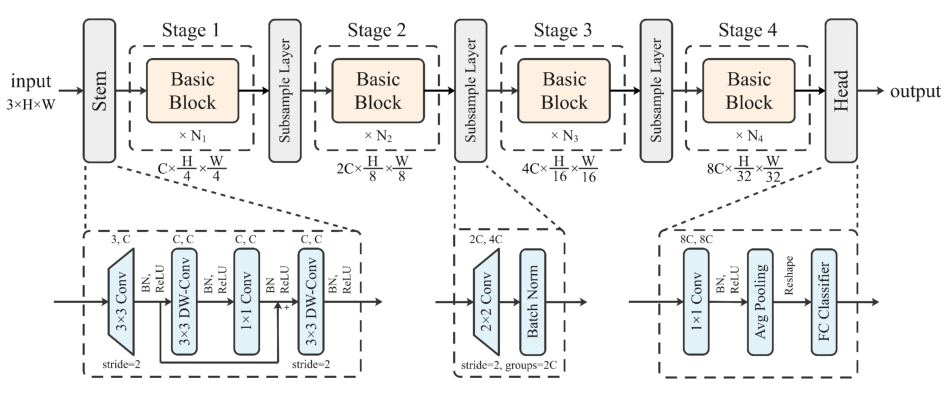
### 2.2.1 深度可分离卷积与分解卷积
深度可分离卷积(Depthwise Separable Convolution)是高效的CNN设计的关键技术之一,它能显著减少计算量和模型大小,同时保持模型性能。深度可分离卷积将标准的卷积操作拆分为两个步骤:深度卷积和逐点卷积。
**深度卷积**(Depthwise Convolution)对每个输入通道独立进行卷积操作,与传统的卷积相比,大幅减少了参数和计算量。假设一个3x3的卷积核,在输入数据的每个通道上执行一次卷积操作。
**逐点卷积**(Pointwise Convolution)或称为1x1卷积,随后对深度卷积的结果进行降维或升维处理。它作为一个全连接层,对深度卷积后的特征进行重新组合。
```python
class DepthwiseSeparableConv(nn.Module):
def __init__(self, in_channels, out_channels):
super(DepthwiseSeparableConv, self).__init__()
self.depthwise = nn.Conv2d(in_channels, in_channels, kernel_size=3, padding=1, groups=in_channels)
self.pointwise = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
x = self.depthwise(x)
x = self.pointwise(x)
return x
```
使用深度可分离卷积的一个显著优点是它极大减少了模型参数量和计算资源,非常适合移动和嵌入式设备。
### 2.2.2 空洞卷积与分组卷积的应用实例
**空洞卷积**(Dilated Convolution)或扩张卷积,通过在卷积核中引入“空洞”,在不增加额外参数的情况下扩大了卷积的感受野,使网络有能力捕捉更大范围的上下文信息。空洞卷积的参数`rate`控制着卷积核的扩张程度。
```python
class DilatedConv(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, rate=1):
super(DilatedConv, self).__init__()
self.dilated = nn.Conv2d(in_channels, out_channels, kernel_size, padding=rate)
def forward(self, x):
return self.dilated(x)
```
在语义分割等任务中,空洞卷积能有效提高模型的分割精度。
**分组卷积**(Grouped Convolution)则是将输入通道和输出通道分成多个组,在组内独立执行卷积操作。这可以减少模型参数和计算量,同时保留一定的特征提取能力。分组卷积是ResNeXt网络的基础。
```python
class GroupedConv(nn.Module):
def __ini
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
卷积神经网络(CNN)专栏是一份全面指南,深入探讨了 CNN 在图像处理领域的强大功能。从基础概念到高级技术,该专栏涵盖了广泛的主题,包括卷积层、池化层、激活函数、数据预处理、模型调优、跨界应用、大数据训练、模型瘦身、迁移学习、可视化技术、多尺度架构、端到端学习、泛化能力提升、实时视频分析优化和细粒度图像分类。通过深入的解释和实用的示例,该专栏为读者提供了掌握 CNN 精妙艺术所需的知识和技能,并将其应用于各种图像处理任务中。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【从图纸到代码的革命】:探索CAD_CAM软件在花键加工中的突破性应用

# 摘要
随着制造业的快速发展,CAD/CAM软件的应用逐渐兴起,成为提高设计与制造效率的关键技术。本文探讨了CAD/CAM软件的基本理论、工作原理和关键技术,并分析了其在花键加工领域的具体应用。通过对CAD/CAM软件工作流程的解析和在花键加工中设计与编程的案例分析,展现了其在提高加工精度和生产效率方面的创新应用。同时,文章展望了CAD/CAM软件未来的发展趋势,重
【组态王系统优化指南】:提升性能与稳定性的10大策略

# 摘要
本文旨在对组态王系统的优化进行全面探讨,覆盖性能调优、系统稳定性和实践操作指南。首先概述组态王系统的优化重要性,然后系统性能调优理论进行了详细阐述,包括性能评估、系统资源管理、网络通信效率提升等关键要素。接着,文中提出了一系列提升系统稳定性的策略,如系统故障诊断、软件更新管理、硬件冗余与故障切换。为了将理论应用于实践,本文还提供了使用性能监控工具和系统调优的实际操作步骤。最后,通过案例分析,本文展望了组态王系统未来的发展趋势,包括人工智能、云计算等
深入揭秘:S7-200 Smart与KEPWARE数据交换的高效策略

# 摘要
本文旨在探讨基于S7-200 Smart PLC和KEPWARE软件平台的数据交换理论与实践应用。首先介绍了S7-200 Smart PLC和KEPWARE的基础知识,接着阐述了数据交换的重要性和理论基础,包括数据交换协议和通信标准,以及数据同步的原理和策略。第四章详细描述了S7-200 Smart与KEPWARE数据交换的配置步骤和实现过程,并通过案例
三菱MR-JE-A伺服电机校准指南:精准定位的秘技

# 摘要
本文全面概述了三菱MR-JE-A伺服电机的校准流程,详细介绍了伺服电机的基本工作原理,包括其控制原理和反馈系统。文中强调了校准前的准备工作,包括所需工具、设备以及安全操作环境,并给出了校准步骤的理论框架。此外,文章还详细介绍了实际操作流程,包括机械装置和电气参数的校准方法,以及校准后的验证测试。针对故障诊断和校准中的挑战,本文提供了常见问题处理方法、
【性能优化指南】:WPS与Office在文档转换为PDF的性能比较

# 摘要
本文综合探讨了WPS与Office文档转换为PDF的过程、性能比较及优化策略。首先概述了文档转换的基本原理,包括技术标准、流程分析以及转换效果的评估标准。接着,详细比较了WPS与Office在文档转换性能方面的表现,包括转换速度、质量和资源占用情况。文章还讨论了文档转换为PDF的性能优化策略,涵盖了优化理论、实践技巧以及性能监控和调优工具的使用。最后,通
Cyclone技术详解:深入核心概念,成为专家
# 摘要
Cyclone技术作为本篇论文的研究主体,是一个专注于处理数据流和并发任务的编程模型。本文第一章概述了Cyclone技术的背景和重要性。第二章深入探讨了Cyclone的核心组件和工作原理,涵盖了其架构设计原则、工作机制以及并发模型,特别强调了数据流处理和事件驱动架构对性能优化的重要性。第三章着重介绍了Cyclone的编程模型,包括语言特性、模块
版本控制系统大对决:CVS、SVN与Git优劣对比

# 摘要
本文探讨了版本控制系统在软件开发中的重要性,对比了CVS、SVN和Git这三种主流系统的原理与实践。通过对各自特点、架构、操作管理、集成扩展等方面的分析,揭示了它们在现代软件开发中的应用和局限性。文章还为选择合适的版本控制系统提供了一个评估指南,并分享了不同行业的最佳实践案例。最后,文章讨论了版本控制在持续集成和自动化测试中的作用,强调了其对提升开发效率和协作
【CAN2.0通信协议深入解析】:掌握工业控制系统与汽车电子的核心技术

# 摘要
本论文系统地介绍了CAN2.0通信协议的基础知识、工作原理、技术细节以及在工业控制系统和汽车电子领域的广泛应用。在基础章节中,详细阐述了CAN协议的架构、消息帧格式、仲裁机制及错误检测和处理策略。随后,分析了CAN2.0在工业控制网络和汽车电子通信网络中的具体应用,包括实时性能、系统集成、诊断测试以及ADAS技术整合。最后,展望了新一代CAN技术标准的进展,包括CAN FD、CAN X
【9大翻译技巧揭秘】:将GMW14241技术文档翻译提升至艺术境界

# 摘要
技术文档翻译是跨文化交流与技术传播的重要环节。本文综合分析了技术文档翻译的艺术与科学,涵盖了翻译前的详尽准备、翻译过程中的技巧实践以及翻译后的审校与优化。本文详细探讨了如何通过分析文档特点、准备翻译工具和资源以及规划翻译流程来提高翻译效率和质量。在翻译实践部分,重点介绍了如何处理技术术语、句子结构调整和文化差异,以及如何进行翻译审校与风格优化。最后,本文结合翻译案例分析,深入剖析了技术文档翻译中
【Flac3D与实际工程应用】:5个案例深度分析与操作实践指南
# 摘要
Flac3D作为一种专业岩土与矿业工程模拟软件,在工程实践中扮演着重要角色。本文首先介绍了Flac3D的基本界面和功能,随后阐述了其材料模型、本构关系、网格划分以及边界条件设置。接着,文章详细探讨了Flac3D在岩土工程中土石坝稳定性、隧道开挖及地质灾害预测的应用,以及在矿业工程中矿体开采、地压管理和采场稳定性评估的应用。
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )