立体视觉里程计仿真与机器学习:结合最新AI技术提升仿真质量
发布时间: 2024-11-13 20:18:00 阅读量: 17 订阅数: 14 
# 1. 立体视觉里程计仿真基础
在现代机器人导航和自动驾驶领域中,立体视觉里程计(Stereo Visual Odometry, SVO)扮演着核心角色,它通过分析连续视频帧之间场景的变化来估计位置和方向。这种技术对于创建可靠的定位系统至关重要,因为它能够在没有全球定位系统(GPS)覆盖的室内或复杂城市环境中,提供连续和精确的移动估计。
立体视觉里程计不仅依赖于精确的图像处理技术,还需要高级的算法来处理和分析从两个相机视角捕获的立体图像。仿真技术为这种复杂系统的研究与开发提供了一种成本效益高且可重复的方法,通过模拟真实的环境和条件,研究者可以在计算机上测试和优化视觉里程计系统。
本章将探讨立体视觉里程计仿真的基础概念,为理解后续章节中深度学习和AI如何增强该技术奠定基础。通过分析SVO的工作原理、关键组件以及其在仿真环境中的应用,我们将为读者提供一个完整的视角来理解这项技术的发展潜力和挑战。
```markdown
## 1.1 立体视觉里程计的工作原理
立体视觉里程计利用左右两个相机捕获的图像对来模拟人类的立体视觉,通过分析同一场景在连续帧中的视差变化,从而推算相机的移动。具体而言,SVO通过以下步骤工作:
1. **图像采集**:相机捕获连续的图像帧。
2. **特征提取**:从这些图像中提取特征点。
3. **特征匹配**:在连续的图像对之间找到匹配的特征点。
4. **位姿估计**:使用匹配点计算相机的位姿变化。
5. **路径融合**:将估计出的位姿变化累加起来,以推断相机的轨迹。
## 1.2 仿真环境的重要性
为了测试和优化SVO算法,构建一个精确的仿真环境至关重要。在仿真环境中,可以设置不同的场景和条件,如不同的光照、天气和地形等,还可以模拟相机运动和噪声。这为算法提供了可重复的测试平台,有助于研究人员在不实际部署硬件的情况下评估性能和改进算法。
仿真环境通常包括以下元素:
- **场景模拟器**:创建逼真的三维环境。
- **传感器模拟器**:模仿真实世界中相机或其他传感器的行为。
- **控制接口**:允许用户模拟特定的运动和条件。
- **数据分析工具**:用于分析仿真结果并进行性能评估。
```
通过本章的介绍,我们搭建了立体视觉里程计仿真研究的基础框架,并介绍了仿真环境的关键组成。在接下来的章节中,将探讨机器学习如何在视觉里程计中发挥作用,以及如何通过仿真技术进一步提升其性能。
# 2. 机器学习在视觉里程计中的应用
### 2.1 机器学习理论基础
#### 机器学习的基本概念和方法
机器学习是一种通过构建算法,从数据中学习模式并进行预测的技术。它的核心在于算法的自我改进能力,使得在面对新的数据输入时,能够做出准确的预测或决策。
基本的机器学习方法可以分为监督学习、无监督学习和强化学习。监督学习从标注数据中学习,通常用于分类和回归任务。无监督学习用于发现数据中的内在结构,适用于聚类和关联规则学习。强化学习关注如何基于环境的状态做出决策,以获得最大化的累积奖励。
#### 神经网络和深度学习原理
神经网络是机器学习的一个重要分支,旨在模拟人类大脑的工作方式,通过多层处理单元(神经元)实现复杂的函数映射。深度学习是神经网络的一种,具有多层结构,能够学习到数据的高级特征表示。
深度学习的核心组件包括激活函数、损失函数和优化器。激活函数如ReLU、Sigmoid等用于引入非线性因素,损失函数如交叉熵损失用于衡量模型预测和真实值之间的差异,优化器如SGD和Adam用于调整模型参数以最小化损失。
### 2.2 机器学习与视觉里程计的结合
#### 特征提取与数据表示
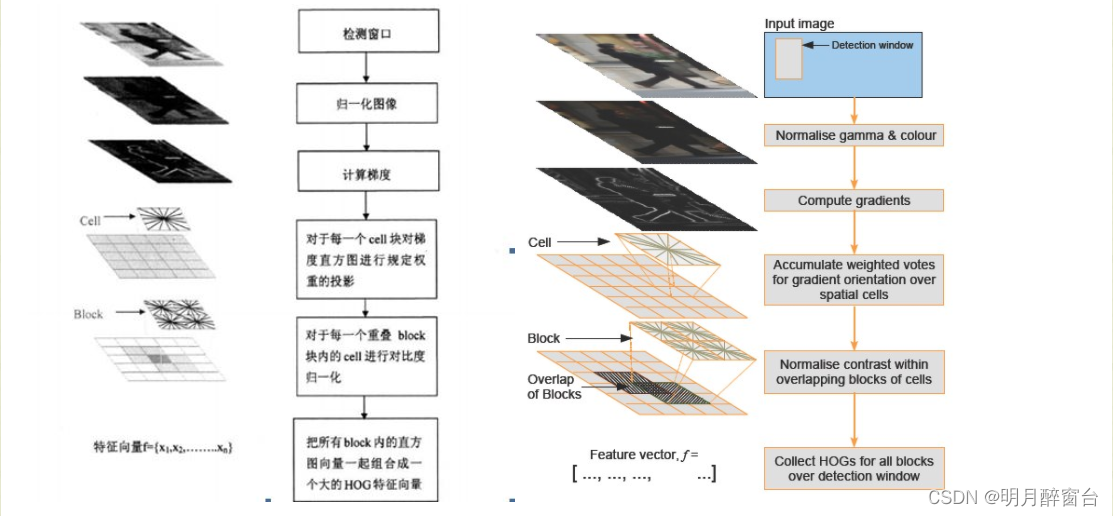
视觉里程计通过提取视频帧中的特征来估计相机的运动轨迹。在机器学习的视角中,特征提取是至关重要的步骤。传统的手工特征提取方法如SIFT、SURF等,虽然稳定但计算复杂度高。深度学习方法如卷积神经网络(CNN)可以自动学习图像的层次化特征表示。
在数据表示方面,深度学习模型能够从原始像素值中提取出更加抽象和具有区分度的特征。这些特征通过模型训练得到,能够更好地反映图像的本质内容。
#### 训练模型与参数调优
训练机器学习模型是通过优化算法对模型参数进行调整,以最小化损失函数。模型训练的一般步骤包括初始化参数、前向传播计算损失、反向传播更新参数。在视觉里程计中,这通常涉及到时间和计算资源的大量消耗。
参数调优涉及到选择合适的学习率、批大小、优化器等超参数。正确的参数设置能够加快收敛速度,避免过拟合或欠拟合现象。例如,使用Adam优化器可能在很多情况下比SGD收敛得更快。
#### 应用场景和案例分析
在实际应用中,机器学习已经在多个视觉里程计的场景中得到了应用。例如,自动驾驶汽车需要精确估计其位置和环境布局,深度学习模型可以帮助处理来自多个摄像头的图像数据。
案例分析可以展示在特定条件下,比如天气变化、光照变化等复杂环境下,机器学习模型如何帮助视觉里程计系统提升稳定性和准确性。通过具体案例,分析模型如何处理异常情况,以及模型的鲁棒性如何。
### 2.3 模型评估与优化
#### 评估指标和测试方法
模型评估是为了检验机器学习模型对新数据的泛化能力。在视觉里程计中常用的评估指标包括误差平方和(SSE)、均方误差(MSE)、平均绝对误差(MAE)等。对于分类问题,准确率、精确率、召回率和F1分数也是重要的评估标准。
测试方法需要确保评估过程的公正性和客观性,常见的测试方法包括交叉验证、保留测试集验证等。交叉验证可以减少因数据划分不同而导致的评估结果的波动性,而保留测试集可以在模型训练完成后进行最终的评估。
#### 模型优化策略
模型优化是提升视觉里程计性能的关键步骤。优化策略包括改进网络结构、增加数据集规模、使用数据增强技术等。例如,采用残差网络(ResNet)结构可以解决深度网络中的梯度消失问题,从而使网络可以更深、更复杂。
参数调优和超参数搜索是优化过程中的重要环节,如网格搜索、随机搜索和贝叶斯优化等方法可以用来寻找最优的超参数设置。此外,知识蒸馏等技术可以在保持模型性能的同时,减小模型的大小,提高模型的运行效率。
# 3. 立体视觉里程计仿真技术
## 3.1 仿真环境搭建
### 3.1.1 软硬件选择与配置
仿真环境的搭建是立体视觉里程计研发的重要步骤,它涉及到一系列的软硬件选择和配置。在硬件方面,仿真环境通常包括高性能计算机、图形处理单元(GPU)、高清摄像头以及必要的连接线材。高性能计算机用于运行仿真软件,而GPU对于加速图像处理和深度学习算法至关重要。摄像头模拟真实的相机系统,捕捉环境图像数据用于仿真。
在软件方面,常用的仿真框架包括Gazebo、V-REP(现在为CoppeliaSim)和ROS(Robot Operating System)。这些软件提供了丰富的工具和模块,能够模拟复杂的物理环境和机器人行为。此外,还需要安装相应的驱动程序以及图像处理软件,如OpenCV。
配置过程中,应当确保各个组件之间的兼容性和性能的平衡。例如,选择与硬件兼容的驱动程序版本,并调整操作系统和仿真软件的参数以获取最佳性能。
### 3.1.2 仿真框架和工具介绍
仿真框架的选择对于模拟精度和效率有着直接影响。Gazebo提供了一个高度可配置的仿真环境,支持多种传感器模型和物理引擎。它的图形渲染能力较强,适合于需要高质量视觉输出的仿真任务。CoppeliaSim则以其用户友好的界面和强大的脚本功能而受到开发者喜爱。ROS则更偏向于机器人应用,提供了丰富的机器人建模和控制工具,特别适合于需要多机器人协同的复杂场景。
在搭建仿真环境时,可以采用Docker等虚拟化技术,创建隔离的开发环境,确保仿真软件的运行不会受到其他系统干扰。此外,还需要使用版本控制系统如Git来管理源代码,并使用持续集成/持续部署(CI/CD)工具自动化测试和部署仿真软件。
## 3.2 仿真数据生成与处理
### 3.2.1 数据采集与模拟
数据采集与模拟是仿真技术的核心部分。首先,真实世界的环境数据需要通过实际的场景采集得到。这可以通过驾驶测试车辆携带高级别的传感器设备在不同环境条件下进行。然后,采集到的数据经过处理后,就可以用于生成仿真环境中的虚拟场景。
在模拟过程中,需要考虑的因素有光照条件、天气变化、路面状况、障碍物类型等。这些因素将直接影响到仿真环境的真实性和复杂性。例如,通过调整光源强度和位置来模拟不同光照条件;通过导入不同的天气模型来模拟雨、雪、雾等天气条件。
### 3.2.2 数据增强与预处理
数据增强和预处理是提高仿真数据质量的重要步骤。数据增强的目的是通过增加样本多样性,使模型对于现实世界中的各种变化具有更好的泛化能力。常见的数据增强手段包括图像旋转、缩放、裁剪、颜色调整等。
预处理包括数据清洗和格式转换两个部分。数据清洗主要是去除噪声和异常值,确保数据的准确性和可靠性。格式转换则是为了将数据转换为模型训练所需的格式,例如将图像数据转换为网络输入层能够接收的格式。
## 3.3 仿真结果分析与验证
### 3.3.1 仿真结果的可视化表示
仿真结果的可视化表示是理解和分析仿真过程的关键。可视化手段包括了2D或3D场景的动态展示、传感器数据的图表展示以及跟踪误差的图形化输出。这些直观的展示方式可以帮助研究者快速发现模型在特定条件下的表现,以及可能存在的问题。
例如,使用Matplotlib或Seaborn等Python可视化库可以创建图表,展示各个传感器的误差变化。使用Unity3D或Blender等三维软件可以

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**立体视觉里程计仿真专栏简介**
本专栏深入探讨立体视觉里程计仿真技术,涵盖从理论基础到实际应用的各个方面。通过一系列循序渐进的教程,您将了解立体视觉里程计仿真的原理、实践指南和高级技巧。专栏还提供框架搭建、数据处理、案例研究和最佳实践等实用信息。
此外,专栏还探讨了创新应用、行业案例、机器学习集成、精度提升和系统测试等前沿主题。通过深入剖析SLAM算法和仿真流程,您将获得对立体视觉里程计仿真的全面理解,并掌握构建高效仿真系统的技能。本专栏旨在为研究人员、工程师和从业者提供一个宝贵的资源,帮助他们推进立体视觉里程计仿真技术的发展和应用。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Keras注意力机制:构建理解复杂数据的强大模型
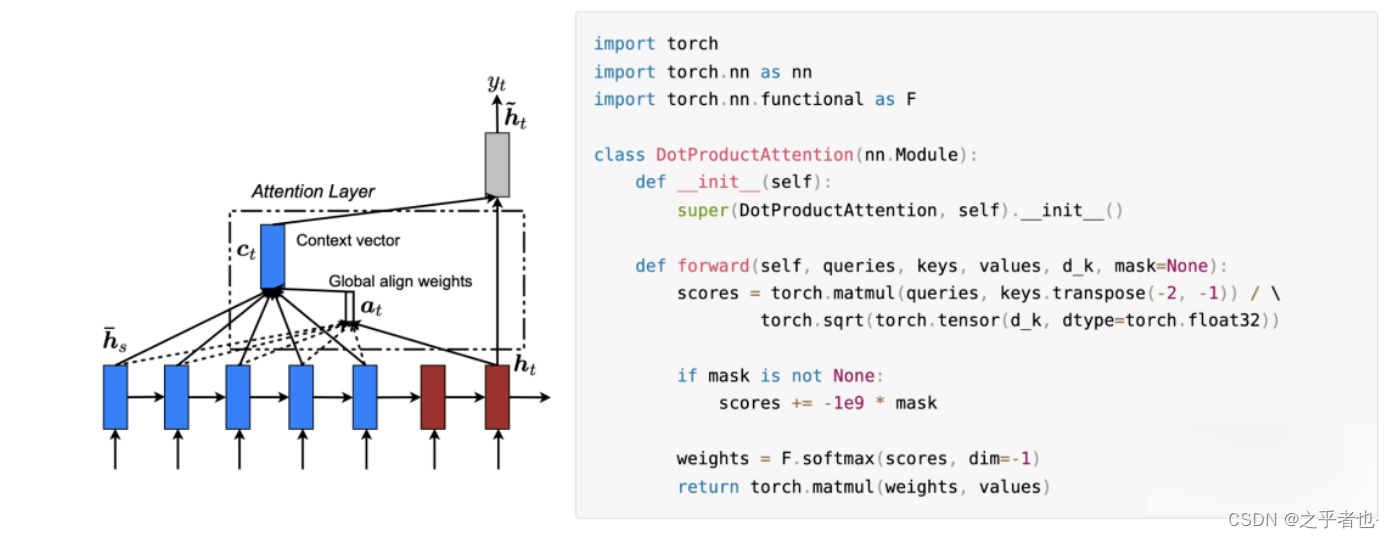
# 1. 注意力机制在深度学习中的作用
## 1.1 理解深度学习中的注意力
深度学习通过模仿人脑的信息处理机制,已经取得了巨大的成功。然而,传统深度学习模型在处理长序列数据时常常遇到挑战,如长距离依赖问题和计算资源消耗。注意力机制的提出为解决这些问题提供了一种创新的方法。通过模仿人类的注意力集中过程,这种机制允许模型在处理信息时,更加聚焦于相关数据,从而提高学习效率和准确性。
## 1.2
PyTorch超参数调优:专家的5步调优指南
# 1. PyTorch超参数调优基础概念
## 1.1 什么是超参数?
在深度学习中,超参数是模型训练前需要设定的参数,它们控制学习过程并影响模型的性能。与模型参数(如权重和偏置)不同,超参数不会在训练过程中自动更新,而是需要我们根据经验或者通过调优来确定它们的最优值。
## 1.2 为什么要进行超参数调优?
超参数的选择直接影响模型的学习效率和最终的性能。在没有经过优化的默认值下训练模型可能会导致以下问题:
- **过拟合**:模型在
Pandas数据转换:重塑、融合与数据转换技巧秘籍
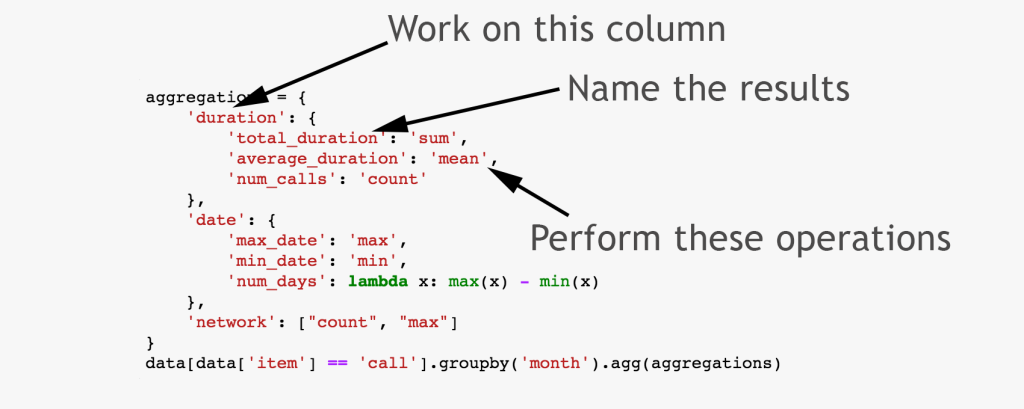
# 1. Pandas数据转换基础
在这一章节中,我们将介绍Pandas库中数据转换的基础知识,为读者搭建理解后续章节内容的基础。首先,我们将快速回顾Pandas库的重要性以及它在数据分析中的核心地位。接下来,我们将探讨数据转换的基本概念,包括数据的筛选、清洗、聚合等操作。然后,逐步深入到不同数据转换场景,对每种操作的实际意义进行详细解读,以及它们如何影响数
【数据集加载与分析】:Scikit-learn内置数据集探索指南

# 1. Scikit-learn数据集简介
数据科学的核心是数据,而高效地处理和分析数据离不开合适的工具和数据集。Scikit-learn,一个广泛应用于Python语言的开源机器学习库,不仅提供了一整套机器学习算法,还内置了多种数据集,为数据科学家进行数据探索和模型验证提供了极大的便利。本章将首先介绍Scikit-learn数据集的基础知识,包括它的起源、
硬件加速在目标检测中的应用:FPGA vs. GPU的性能对比
# 1. 目标检测技术与硬件加速概述
目标检测技术是计算机视觉领域的一项核心技术,它能够识别图像中的感兴趣物体,并对其进行分类与定位。这一过程通常涉及到复杂的算法和大量的计算资源,因此硬件加速成为了提升目标检测性能的关键技术手段。本章将深入探讨目标检测的基本原理,以及硬件加速,特别是FPGA和GPU在目标检测中的作用与优势。
## 1.1 目标检测技术的演进与重要性
目标检测技术的发展与深度学习的兴起紧密相关
NumPy中的文件输入输出:持久化数据存储与读取的4大技巧

# 1. NumPy概述与数据持久化基础
在本章中,我们将对NumPy进行一个初步的探讨,并且将重点放在其数据持久化的基础方面。NumPy是Python中用于科学计算的基础库,它提供了高性能的多维数组对象和用于处理这些数组的工具。对于数据持久化而言,它确保了数据能够在程序运行之间保持可用性。数据持久化是数据科学和机器学习项目中不可或缺的一部分,特别是在处理
【图像分类模型自动化部署】:从训练到生产的流程指南

# 1. 图像分类模型自动化部署概述
在当今数据驱动的世界中,图像分类模型已经成为多个领域不可或缺的一部分,包括但不限于医疗成像、自动驾驶和安全监控。然而,手动部署和维护这些模型不仅耗时而且容易出错。随着机器学习技术的发展,自动化部署成为了加速模型从开发到生产的有效途径,从而缩短产品上市时间并提高模型的性能和可靠性。
本章旨在为读者提供自动化部署图像分类模型的基本概念和流程概览,
【循环神经网络】:TensorFlow中RNN、LSTM和GRU的实现

# 1. 循环神经网络(RNN)基础
在当今的人工智能领域,循环神经网络(RNN)是处理序列数据的核心技术之一。与传统的全连接网络和卷积网络不同,RNN通过其独特的循环结构,能够处理并记忆序列化信息,这使得它在时间序列分析、语音识别、自然语言处理等多
【商业化语音识别】:技术挑战与机遇并存的市场前景分析
# 1. 商业化语音识别概述
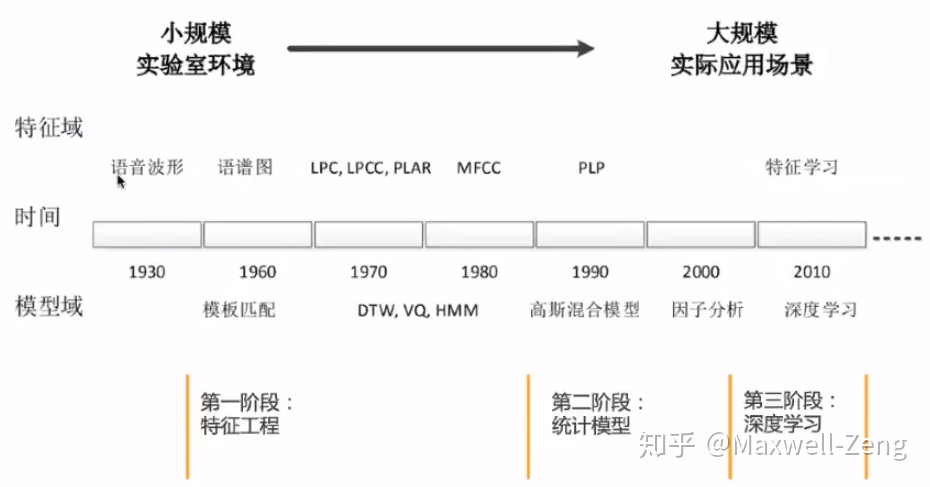
语音识别技术作为人工智能的一个重要分支,近年来随着技术的不断进步和应用的扩展,已成为商业化领域的一大热点。在本章节,我们将从商业化语音识别的基本概念出发,探索其在商业环境中的实际应用,以及如何通过提升识别精度、扩展应用场景来增强用户体验和市场竞争力。
## 1.1 语音识别技术的兴起背景
语音识别技术将人类的语音信号转化为可被机器理解的文本信息,它
优化之道:时间序列预测中的时间复杂度与模型调优技巧
# 1. 时间序列预测概述
在进行数据分析和预测时,时间序列预测作为一种重要的技术,广泛应用于经济、气象、工业控制、生物信息等领域。时间序列预测是通过分析历史时间点上的数据,以推断未来的数据走向。这种预测方法在决策支持系统中占据着不可替代的地位,因为通过它能够揭示数据随时间变化的规律性,为科学决策提供依据。
时间序列预测的准确性受到多种因素的影响,例如数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )