
温晴川等:
基于双目立体视觉的视线跟踪系统标定
动时,可以认为眼球中心与头部相对静止。
由于中央 凹并不 在人眼 光轴轴 线上,所以眼睛
视线方 向 与 眼 睛 光 轴 存 在 一 定 的 夹 角,也 称 之 为
Ka
pp
a
角。眼睛视轴与光轴在水平方向上的夹角大
约为
5°
,其中左眼
5°
左右,右 眼
-5°
左右,垂 直 方向
上的夹角大约为
2°
~
3°
,
Ka
pp
a
角因人而异,并没有
固定值
[
11
]
。由于眼睛的视线结构 较为复 杂,眼睛 视
轴方向一般不能直 接 得到
,通 常 需要 在 估计 到 眼睛
光轴方向后,加入眼睛视轴与光轴之间的补偿夹角,
即
Ka
pp
a
角,进而得到眼睛视线方向。
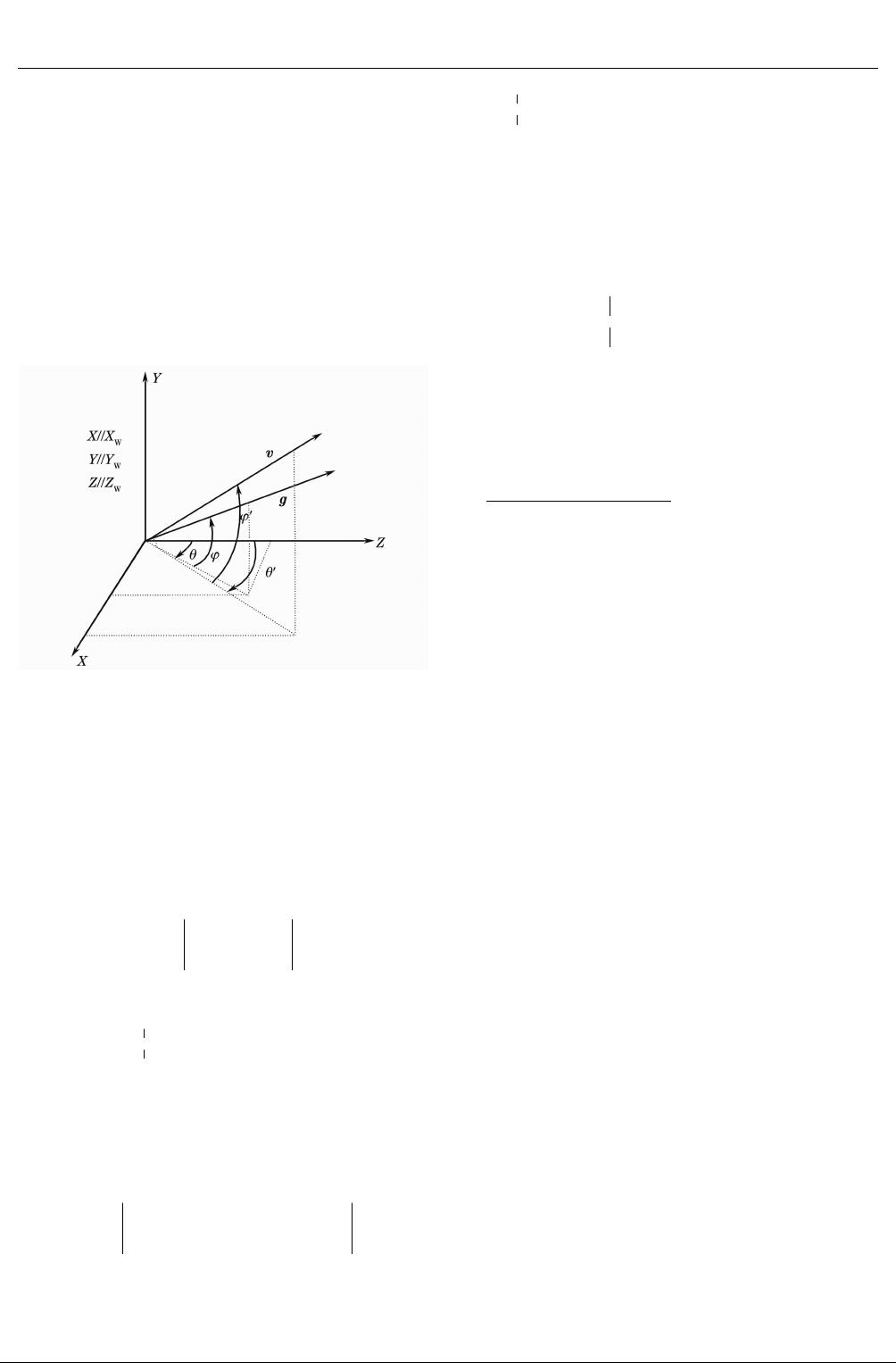
图
3
视轴与光轴夹角
Fi
g
.3 An
g
lebetweenvisualaxisando
p
ticalaxis
为了更好地描述眼睛视轴与光轴之间的空间位
置关系,建立如 图
3
所 示 的 空 间 坐 标 系,坐 标 系 中
的
犡
轴、
犢
轴、
犣
轴分别与世界坐标系 的
犡
W
轴、
犢
W
轴、
犣
W
轴平行,眼睛 光轴 与 坐标 系 水平 方 向和 垂 直
方向的夹角分别 为
θ
和
φ
,则 眼 睛光 轴 在世 界 坐标
系下的单位向量可表示为
[
12
]
犵
=
-
sin
θ
cos
φ
sin
θ
cos
θ
cos
熿
燀
燄
燅
φ
, (
1
)
且
θ
和
φ
可以通过光轴在空间中的单位向量
犵
得到
θ
=
arctan
(
犵
狓
/
犵
狕
)
φ
=
arcsin
(
犵
狔
烅
烄
烆
)
.
(
2
)
设视轴与光轴在水平和垂直方向的夹角分别为
α
e
y
e
、
β
e
y
e
,则眼睛视轴在水 平方向 和垂直 方 向上 的 夹
角分别为
θ
+
α
e
y
e
、
φ
+
β
e
y
e
,则空间中 的视线 向量
狏
可
以表示为
狏
=
-
sin
(
θ
+
α
e
y
e
)
cos
(
φ
+
β
e
y
e
)
sin
(
θ
+
α
e
y
e
)
cos
(
θ
+
α
e
y
e
)
cos
(
φ
+
β
e
y
e
熿
燀
燄
燅
)
.
(
3
)
通过(
2
)式、(
3
)式可以得到
α
e
y
e
=
arctan
(
狏
狓
/
狏
狕
)
-
arctan
(
犵
狓
/
犵
狕
)
β
e
y
e
=
arcsin
(
狏
狔
)
-
arcsin
(
犵
狔
烅
烄
烆
)
.
(
4
)
当使用者看着空间中的视线点
犌
时,
犌
点位于
眼睛视线方向上,且满足
犌
=
犘
+
狋狏
, (
5
)
式中
犘
为虹膜 中 心坐 标,
狋
为参 数,
狏
为 视 线 在 空 间
中的单位向量
,(
5
)式写成参数方程形式为
犌
狓
=
犙
狓
+
狋狏
狓
犌
狔
=
犙
狔
+
狋狏
狔
犌
狕
=
犙
狕
+
狋狏
烅
烄
烆
狕
.
(
6
)
眼睛的视线估计点为眼睛视线与空间平面的交
点,如果已知空间的平面方程为
犃狓
+
犅
狔
+
犆狕
+
犇
=
0
, (
7
)
联 立 (
6
) 式、 (
7
) 式 可 得 参 数
狋
=
-
犃犙
狓
+
犅犙
狔
+
犆犙
狕
+
犇
犃狏
狓
+
犅狏
狔
+
犆狏
狕
,把
狋
代入(
5
)式即可得到
视线估计点。
根据上面的讨论,要得到眼睛视线点的估计值,
需要知道 眼球中 心
犙
与虹膜 中心
犘
的空间 三维 坐
标、眼睛视轴与光轴在水平和垂直方向上的夹角
α
e
y
e
与
β
e
y
e
、屏幕的空间平 面 方程。首先 为 了补 偿 头部 移
动带来的视线估计误差,需要建立头部坐标系,对摄
像机获取的每帧图像 都进 行 头部 姿 态估 计,得到 头
部坐标系相对于世界 坐标 系 的变 换 关系,通 过个 人
参数标定可 以 得 到 眼 球 中 心 在 头 部 坐 标 系 下 的 坐
标,然后经过坐标变换 可 以得 到 各帧 图 像中 眼 球中
心在世界坐标系下的坐标
犙
;虹膜中心
犘
的空间 三
维坐标可以通过在左右摄像机图像中分别定位虹膜
中心,然后结合双摄像机标定结果计算得到;眼睛视
轴与光轴之间的夹角
α
e
y
e
与
β
e
y
e
可以通 过 对使 用 者
进行个人参数标定得到;屏幕的空间 平面方 程可以
通过屏幕标定得到。
3
视线跟踪系统的标定
3.1
双目立体视觉系统的标定
3.1.1
摄像机的标定
摄 像 机 标 定 是 计 算 机 视 觉 和 三 维 测 量 中 最 基
本、最重要的 工 作
[
13
]
,现有 的 摄 像 机 标 定 方 法 可 分
为传统标定方法、主动视觉标定 方法
[
14
]
和摄像 机自
标定方法
[
15
,
16
]
,其 主 要 目 的 是 确 定 摄 像 机 的 内、外
部参数,在基于双目立体视觉的视线跟踪系统中,还
需要确定双摄像机 之 间的 相 对位 置 关系
,从 而 建立
统一的世界坐标系,使 整 个视 线 跟踪 系 统处 于 同一
个坐标系统中。
10150023
剩余10页未读,继续阅读

weixin_38655484
- 粉丝: 4
- 资源: 909
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多功能HTML网站模板:手机电脑适配与前端源码
- echarts实战:构建多组与堆叠条形图可视化模板
- openEuler 22.03 LTS专用openssh rpm包安装指南
- H992响应式前端网页模板源码包
- Golang标准库深度解析与实践方案
- C语言版本gRPC框架支持多语言开发教程
- H397响应式前端网站模板源码下载
- 资产配置方案:优化资源与风险管理的关键计划
- PHP宾馆管理系统(毕设)完整项目源码下载
- 中小企业电子发票应用与管理解决方案
- 多设备自适应网页源码模板下载
- 移动端H5模板源码,自适应响应式网页设计
- 探索轻量级可定制软件框架及其Http服务器特性
- Python网站爬虫代码资源压缩包
- iOS App唯一标识符获取方案的策略与实施
- 百度地图SDK2.7开发的找厕所应用源代码分享
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


