卡尔曼平滑详解与应用
需积分: 0 15 浏览量
更新于2024-07-09
收藏 465KB PDF 举报
"该资源是一个关于卡尔曼平滑(Kalman Smoothing)的PPT,主要探讨了卡尔曼滤波与平滑的区别,并详细介绍了卡尔曼滤波器的工作原理和算法流程。"
卡尔曼滤波与平滑是两种处理动态系统状态估计的重要方法。卡尔曼滤波(Kalman Filter)主要用于实时处理,它在接收到当前数据时更新状态估计,而卡尔曼平滑器(Kalman Smoother)则是在所有数据都已知的情况下进行后处理,提供更为精确的全局状态估计。
在卡尔曼滤波中,有两个关键步骤:时间更新(Time Update)和测量更新(Measurement Update)。时间更新阶段,系统状态会根据动态模型(Dynamics model)和预测噪声(Q)进行预测;测量更新阶段,利用观测模型(Observation model)和观测噪声(R)来校正预测状态,从而得到更准确的估计。
公式表示如下:
- 时间更新:状态向量 \( X_t \) 预测值由上一时刻的状态和动态矩阵 \( A \) 决定,即 \( X_t = AX_{t-1} + W \),其中 \( W \) 是过程噪声。
- 测量更新:使用观测矩阵 \( C \) 和校正因子 \( K \) 更新状态估计,即 \( X_t = X_t^+ + K(Y_t - CX_t^+) \),其中 \( Y_t \) 是测量值,\( X_t^+ \) 是预测状态,\( K \) 是卡尔曼增益。
卡尔曼平滑器在全数据集可用时进行操作,它可以对过去的估计进行修正,提供更优的全局状态序列。与滤波器不同,平滑器可以利用未来的测量信息来改进对过去状态的估计。
卡尔曼滤波器的算法通常包含以下循环:
1. 时间更新:预测下一时刻的状态和协方差矩阵。
2. 测量更新:利用新测量值校正状态估计和协方差矩阵。
总结来说,卡尔曼滤波器在有限的实时数据流中进行状态估计,而卡尔曼平滑器则在所有数据集上进行优化,两者都是基于概率的递推估计算法,通过动态模型和观测模型来不断调整状态估计,以达到最小化估计误差的目的。在实际应用中,卡尔曼滤波常用于导航、控制、信号处理等领域,而卡尔曼平滑则在数据分析和回溯分析中更有优势。
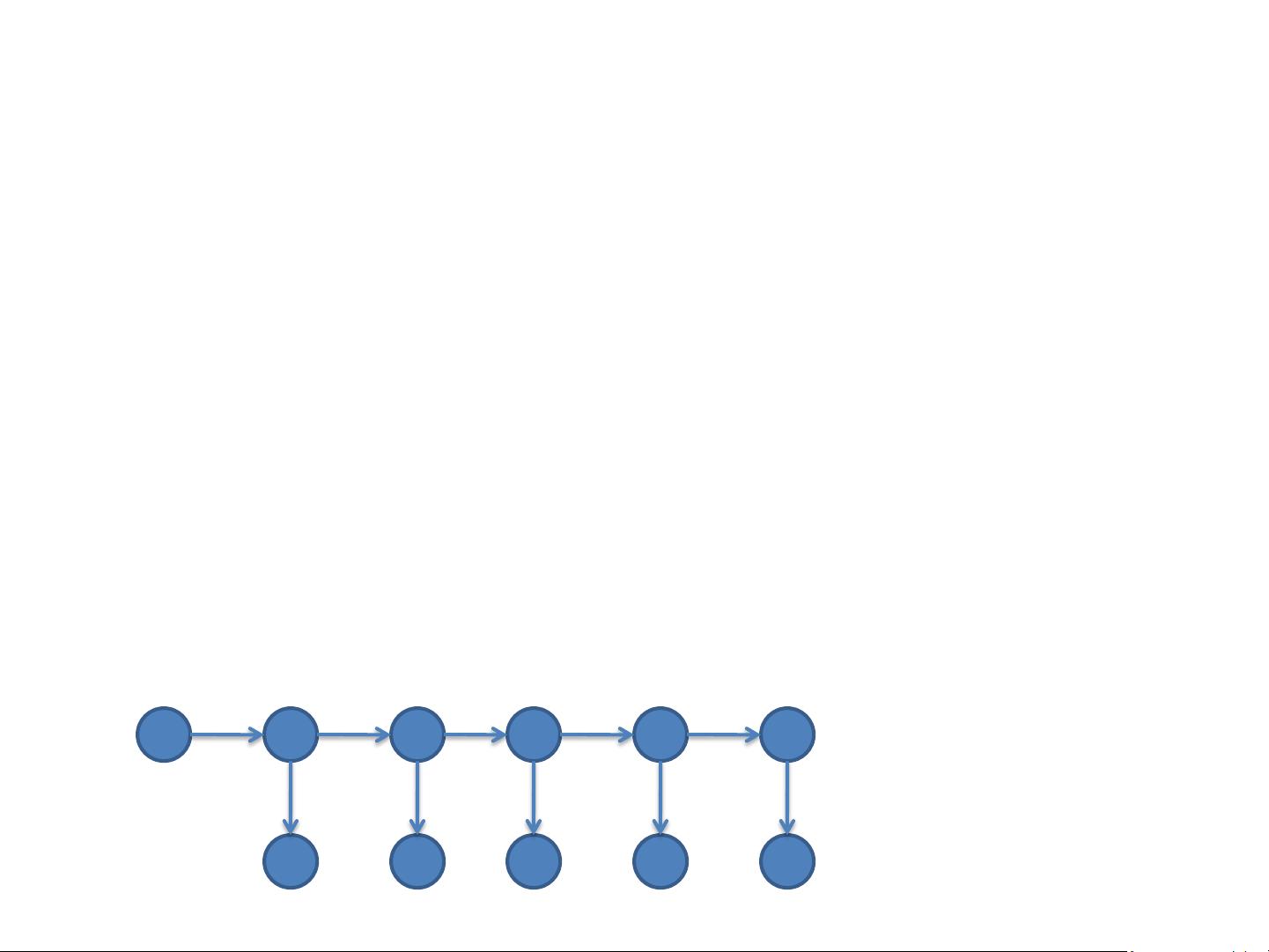
Kalman Filtering Recap
• Time update
–
• Measurement update:
–
– Compute joint distribution
– Compute conditional
X
0
X
1
X
2
X
3
X
4
X
5
Y
1
Y
2
Y
3
Y
4
Y
5
…
ttttt
WAXX
||1
1|1|1
ttttt
VCXY
),(
|1|1 tttt
YX
)|(
1|1|11|1
ttttttt
YXX y
剩余14页未读,继续阅读
2019-12-12 上传
2019-07-01 上传
2023-08-26 上传
2023-07-09 上传
2023-07-15 上传
2024-01-23 上传
2023-03-29 上传
2023-07-10 上传
2023-06-01 上传
2023-07-12 上传

qq321qq321
- 粉丝: 3
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 解决本地连接丢失无法上网的问题
- BIOS报警声音解析:故障原因与解决方法
- 广义均值移动跟踪算法在视频目标跟踪中的应用研究
- C++Builder快捷键大全:高效编程的秘密武器
- 网页制作入门:常用代码详解
- TX2440A开发板网络远程监控系统移植教程:易搭建与通用解决方案
- WebLogic10虚拟内存配置详解与优化技巧
- C#网络编程深度解析:Socket基础与应用
- 掌握Struts1:Java MVC轻量级框架详解
- 20个必备CSS代码段提升Web开发效率
- CSS样式大全:字体、文本、列表样式详解
- Proteus元件库大全:从基础到高级组件
- 74HC08芯片:高速CMOS四输入与门详细资料
- C#获取当前路径的多种方法详解
- 修复MySQL乱码问题:设置字符集为GB2312
- C语言的诞生与演进:从汇编到系统编程的革命
