
2788 IEEE TRANSACTIONS ON IMAGE PROCESSING, VOL. 22, NO. 7, JULY 2013
Classification
Feature Extraction
Preprocessing
f
1
f
4
f
3
f
2
OMT flow field
NSD flow field
Optical Flow Estimation:
- Optimal Mass Transport,
OMT (Sec. II.B)
- Non-Smooth Data,
NSD (Sec. II.C)
Essential Pixels:
Rejection of little motion
pixels (Sec. III.A)
Features: (Sec. III.B)
1. OMT transport energy
2. NSD magnitude
3. OMT source match
4. NSD directional variance
Color Transformation:
Convert RGB-frames to scalar
image weighting high fire-like
colors (Sec. II.B)
RGB-frames
Scalar-valued
frames
Feature vector
Neural net
Probability of
frame being fire
Supervised Classification:
Neural Net (Sec. IV.B)
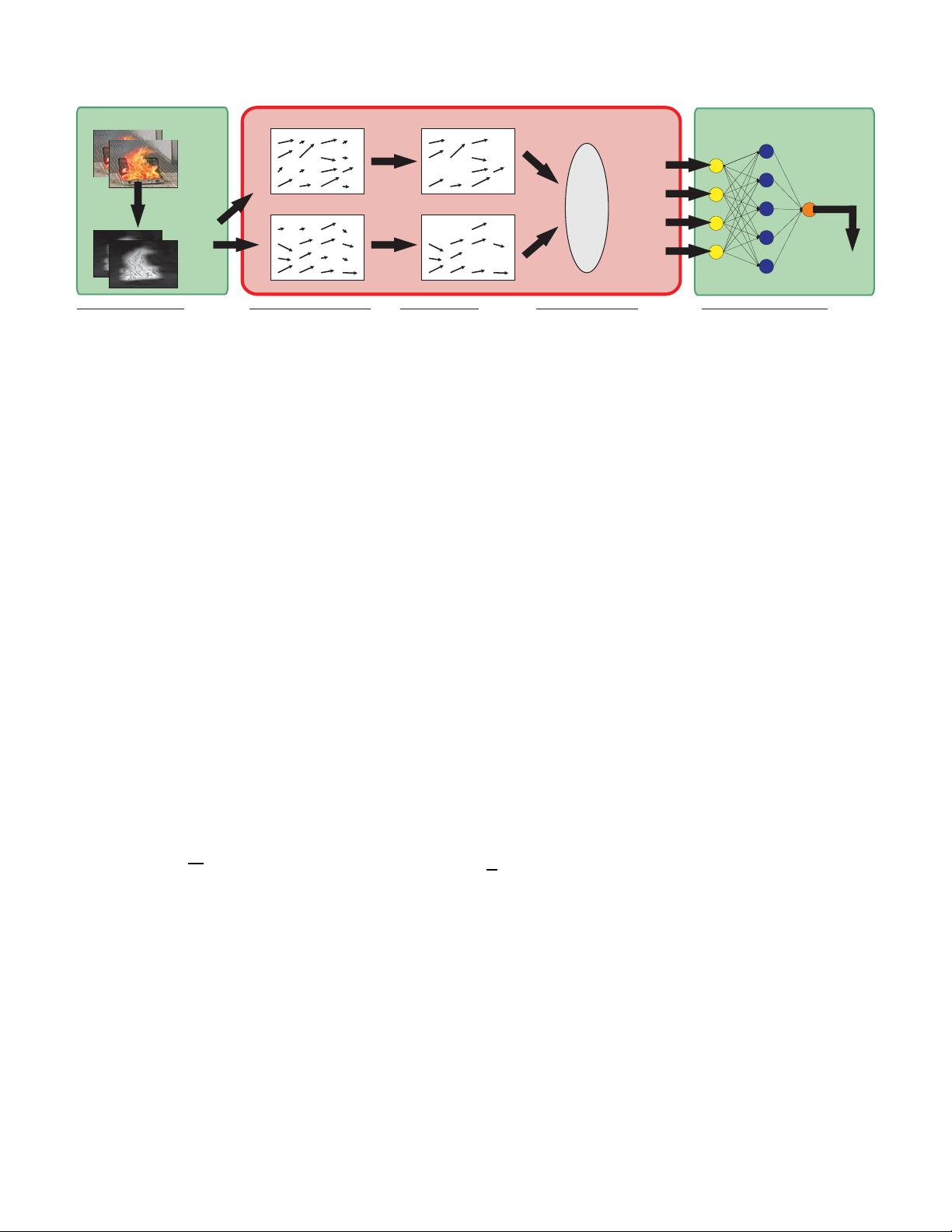
Fig. 2. The Proposed fire detection algorithm. The paper’s focus is put on the feature extraction block, where two optical flow fields (OMT and NSD) are
computed in parallel from which the 4D feature vector is built.
quantitative analysis.
II. O
PTICAL FLOW ESTIMATION
A comprehensive survey of optical flow since the pioneering
papers by Horn/Schunck [25] and Lucas/Kanade [18] from
1981 is beyond the scope of this paper. However, the short
introduction in Section II-A, should suffice to understand the
issues of classical optical flow when applied to fire detection.
To ameliorate these issues, Sections II-B and II-C propose
the use of two novel optical flow estimations—Optimal Mass
Transport (OMT) and Non-Smooth Data (NSD)—that are
specifically developed for the fire detection task.
A. Classical Optical Flow
Optical flow estimation computes correspondence between
pixels in the current and the previous frame of an image
sequence. Central to most approaches in establishing this cor-
respondence is the assumption of intensity constancy: moving
objects preserve their intensity values from frame to frame.
This assumption leads to the optical flow constraint
d
dt
I = I
x
u + I
y
v + I
t
= 0(1)
where I (x, y, t) is a sequence of intensity images with spatial
coordinates (x, y) ∈ and time variable t ∈[0, T ] (subscripts
denote partial derivatives). The flow vector (u,v) = (x
t
, y
t
)
points into the direction where the pixel (x, y) is moving.
In Eq. (1), I
x
, I
y
,andI
t
are given image quantities and the
equation is solved for u and v. This problem is ill-posed
because there are two unknowns in Eq. (1) and one equation
per pixel. This is known as the aperture problem, which states
that only the optical flow component parallel to the image
gradient can be computed.
To obtain a unique solution, the optical flow algorithms
make further assumptions on the flow field, which is tradition-
ally done by enforcing smoothness. Whereas Lucas-Kanade
optical flow [18] is an early representative of methods that
assume flow constancy for pixels in a neighborhood, this paper
follows the point-wise approach, which applies conditions per
pixel instead of constant neighborhoods. Point-wise methods
generally attempt to minimize a functional of the form
T
0
r
data
(I, u,v)+ αr
reg
(u,v)dt dx dy (2)
where the data term r
data
represents the error from the optical
flow constraint Eq. (1) and the regularization term r
reg
quanti-
fies the smoothness of the flow field. The constant α controls
regularization. In the pivotal paper by Horn-Schunck [25], the
data and regularization terms are chosen as
T
0
I
t
+ I
x
u + I
y
v
2
+ α(∇u
2
2
+∇v
2
2
) dt dx dy.
(3)
From this point, numerous advances have been achieved
mostly by changing the regularization term to be image-driven
or anisotropic. The optical flow constraint Eq. (1) remains
central to all those advances. A detailed survey on related
optical flow work can be found in [26].
B. Optimal Mass Transport (OMT) Optical Flow
Classical optical flow models based on brightness constancy,
d
dt
I = 0, are inadequate to model the appearance of fire
for two reasons. First, fire does not satisfy the intensity
constancy assumption Eq. (1), since rapid (both spatially and
temporally) change of intensity occurs in the burning process
due to fast pressure and heat dynamics. Second, smoothness
regularization may be counter-productive to the estimation
of fire motion, which is expected to have a turbulent, i.e.,
non-smooth, motion field. For these reasons, an optical flow
estimation modeling fire as a dynamic texture, the optimal
mass transport (OMT) optical flow, was introduced in [24].
A review of the OMT optical flow is given next.
1) Derivation: The optical flow problem is posed as a
generalized mass—representing image intensity I—transport
problem, where the data term enforces mass conservation.
The conservation law is written as
I
t
+∇·(uI) = 0(4)
剩余11页未读,继续阅读

dj1275660199
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


