
西南交通大学本科毕业设计(论文) 第 6 页
2.1.2 坐标系在固定参考坐标系中的表示
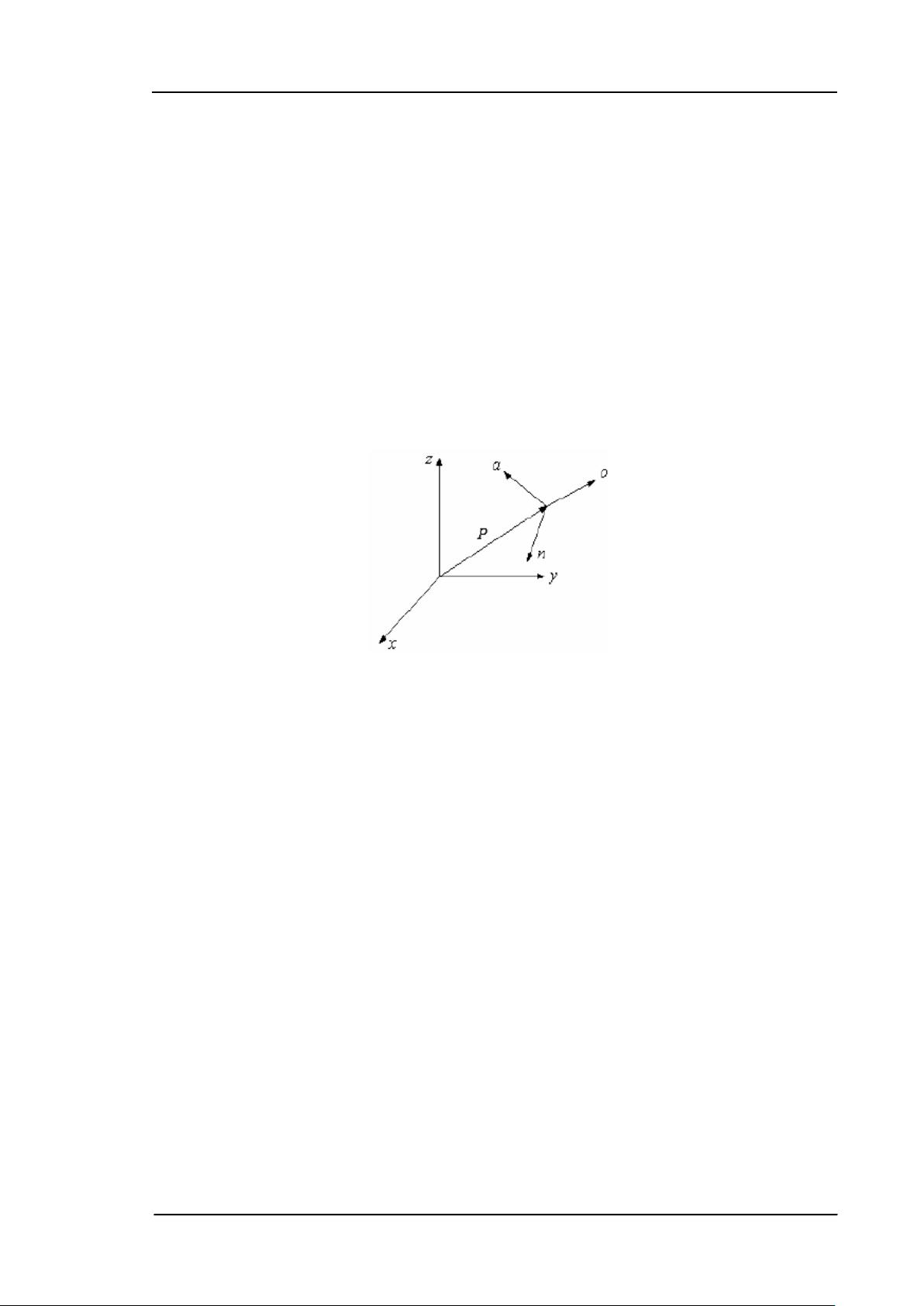
当一个坐标系位于另一个坐标系中时,如图 2-2 所示,通常用三个互相垂直的单
位向量 n、o、a 表示,这三个变量分别代表法线(normal)、指向(orientation)与
接近(approach)向量(如图 2-2 所示)。每一个单位向量都可以由它所在参考坐标
系中的三个分量表示,这样,坐标系 F 就可以表示为由四个向量组成的矩阵:
=
0 0 0 1
x x x x
y y y y
z z z z
n o a p
n o a p
n o a p
é ù
ê ú
ê ú
ê ú
ê ú
ê ú
ë û
F
(2-3)
图 2-2 一个坐标系在另一个坐标系中的表示
式(2-3)中前三个列向量取 w=0,表明该坐标系三个单位向量 n、o、a 的方向。
而第四个列向量中 w=1,表示该坐标系相对于参考坐标系的位置。
2.2 坐标系的变换
坐标系的变换包括绕固定参考坐标系的变换和绕运动参考坐标系的变换。
2.2.1 齐次变换
空间中一个坐标系相对于固定的参考坐标系的运动称为齐次变换。齐次变换可以
是平移运动,可以是旋转运动,也可以是平移与旋转的复合运动。
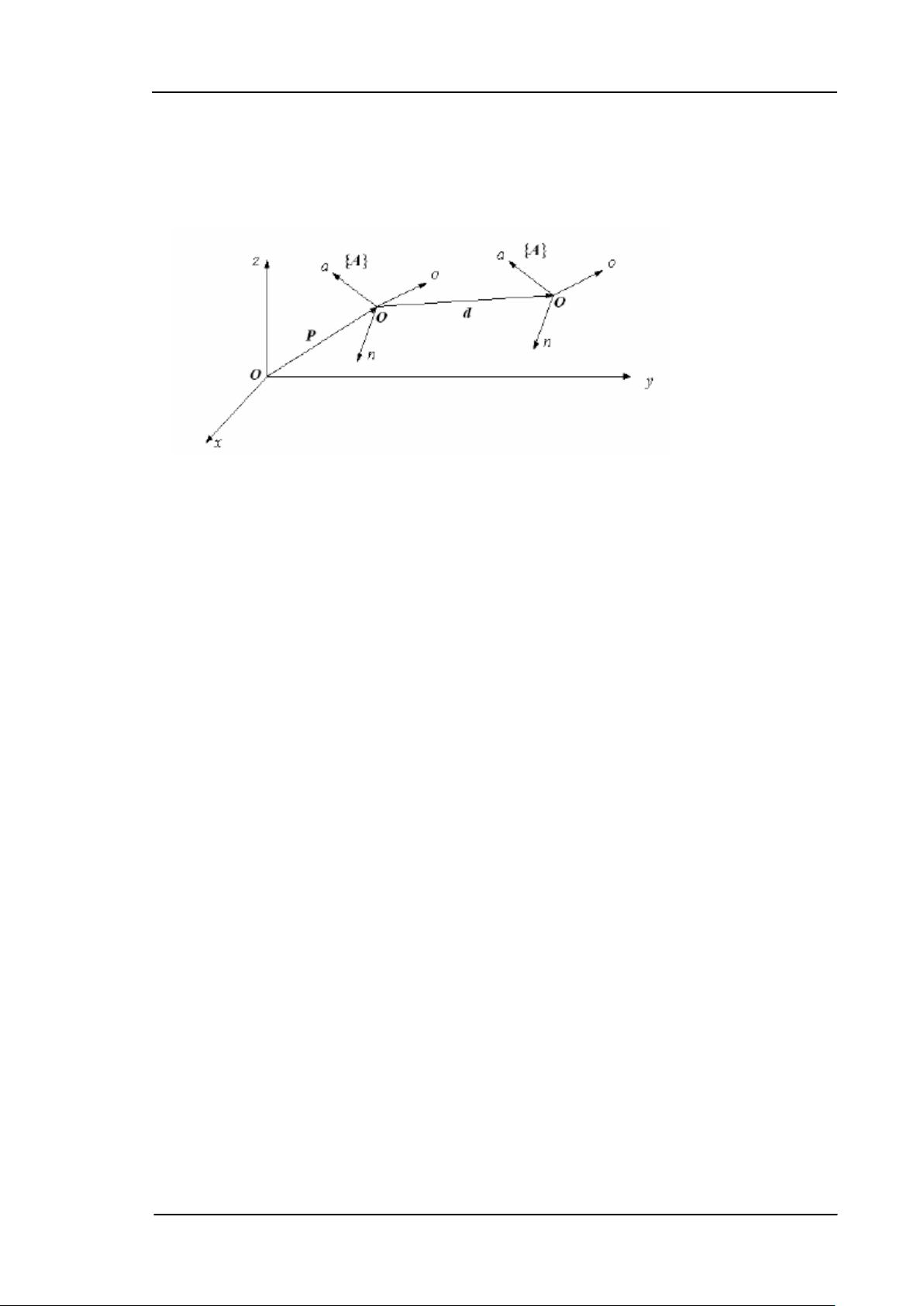
(1) 纯平移齐次变换
如果一个坐标系(它可能表示的是一个物体)在空间运动中相对于固定参考坐标
系的姿态不发生变化,即该坐标系的三个单位向量方向不变,只改变它的坐标原点位
置,则称这种运动为平移运动。如图 2-3 所示,坐标系{A}沿平移向量 d 平移到新
的位置:


剩余83页未读,继续阅读

南抖北快东卫
- 粉丝: 78
- 资源: 5588

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
展开
我的内容管理
展开







最新资源
- 51单片机驱动DS1302时钟与LCD1602液晶屏万年历设计
- React 0.14.6版本源码分析与组件实践
- ChatGPT技术解读与应用分析白皮书
- 米-10直升机3D模型图纸下载-3DM格式
- Tsd Music Box v3.02:全面技术项目源码资源包
- 图像隐写技术:小波变换与SVD数字水印的Matlab实现
- PHP图片上传类源码教程及资源下载
- 掌握图像压缩技术:Matlab实现奇异值分解SVD
- Matlab万用表识别数字仪表教程及源码分享
- 三栏科技博客WordPress模板及丰富技术项目源码资源下载
- 【Matlab】图像隐写技术的改进LSB方法源码教程
- 响应式网站模板系列:右侧多级滑动式HTML5模板
- POCS算法超分辨率图像重建Matlab源码教程
- 基于Proteus的51单片机PWM波频率与占空比调整
- 易捷域名查询系统源码分享与学习交流平台
- 图像隐写术:Matlab实现SVD数字水印技术及其源码
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


