
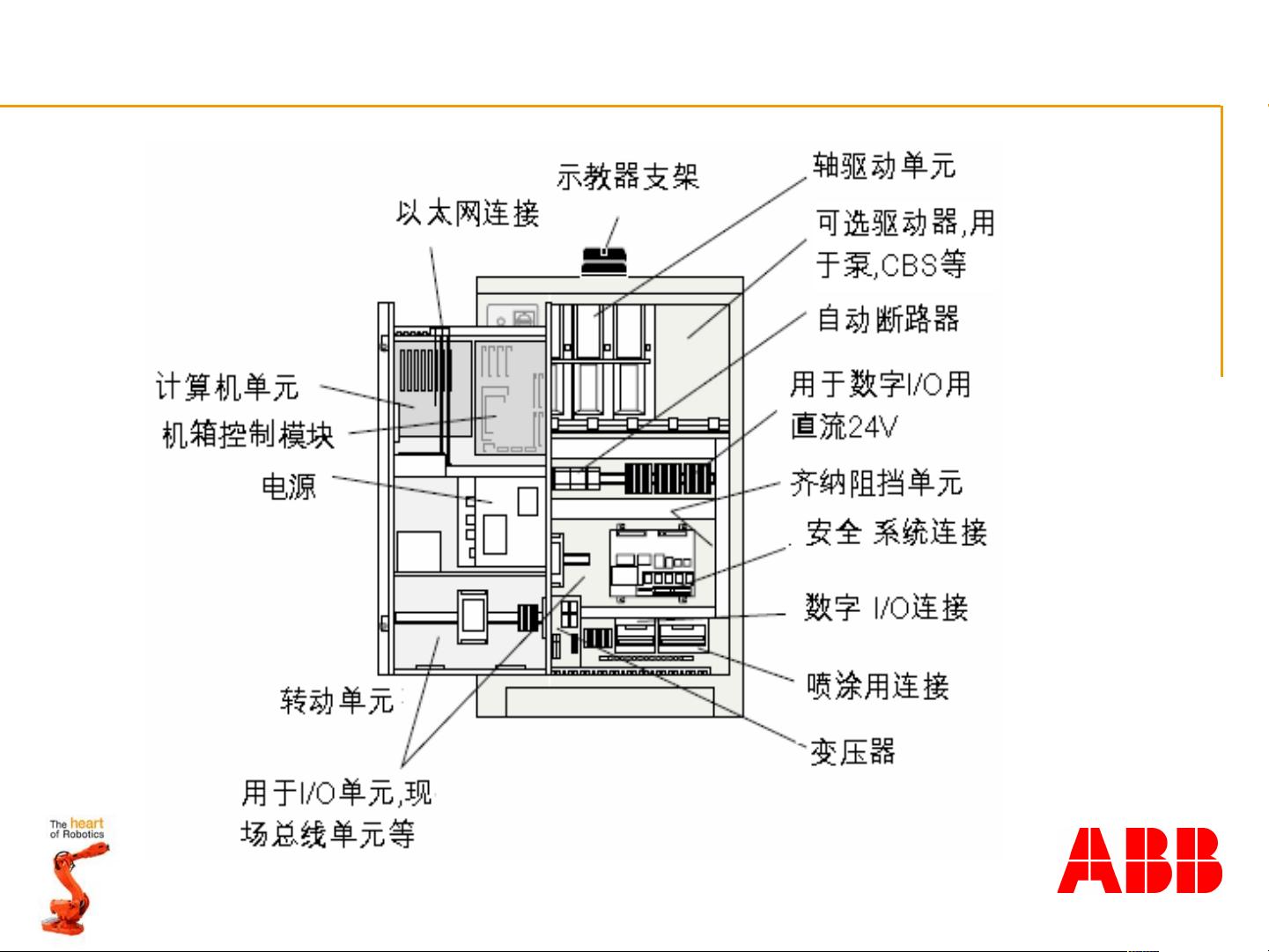
ATMA - 7
控制柜元件位置 --- 紧凑型控制柜
剩余36页未读,继续阅读

智慧安全方案
- 粉丝: 3759
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型矿用本安直流稳压电源设计:双重保护电路
- 煤矿掘进工作面安全因素研究:结构方程模型
- 利用同位素位移探测原子内部新型力
- 钻锚机钻臂动力学仿真分析与优化
- 钻孔成像技术在巷道松动圈检测与支护设计中的应用
- 极化与非极化ep碰撞中J/ψ的Sivers与cos2φ效应:理论分析与COMPASS验证
- 新疆矿区1200m深孔钻探关键技术与实践
- 建筑行业事故预防:综合动态事故致因理论的应用
- 北斗卫星监测系统在电网塔形实时监控中的应用
- 煤层气羽状水平井数值模拟:交替隐式算法的应用
- 开放字符串T对偶与双空间坐标变换
- 煤矿瓦斯抽采半径测定新方法——瓦斯储量法
- 大倾角大采高工作面设备稳定与安全控制关键技术
- 超标违规背景下的热波动影响分析
- 中国煤矿选煤设计进展与挑战:历史、现状与未来发展
- 反演技术与RBF神经网络在移动机器人控制中的应用
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


