自动驾驶定位:三维几何变换与坐标系详解
需积分: 5 15 浏览量
更新于2024-08-05
1
收藏 6.5MB PDF 举报
本篇进阶课程⑭深入探讨了Apollo自动定位技术中的核心概念——三维几何变换和坐标系。主要内容包括以下几个关键知识点:
1. 加速度计:在自动驾驶系统中,加速度计是重要的传感器之一,用于测量车辆的加速度,这对于确定车辆运动状态和定位至关重要。通过加速度数据,系统能够估计车辆的速度和位置变化。
2. 欧拉角:三维空间中的旋转通常使用欧拉角来描述,这是一种常见的旋转顺序组合方式,如XYZ、ZYX或ZXZ等。欧拉角虽然直观,但存在 gimbal lock(极轴锁定)问题,可能导致旋转描述不连续。
3. 陀螺仪:陀螺仪用于测量物体在三个轴上的角速度,是实现精确姿态控制的关键。它在定位系统中用于校正由于地球自转引起的误差。
4. 旋转矩阵:三维旋转可以用3×3矩阵表示,包括X、Y、Z轴的旋转矩阵RX、RY、RZ,这些矩阵组合起来形成一个总的旋转矩阵,能够描述任意方向的旋转。
5. 四元数:四元数是一种高效的旋转表示方法,相比于欧拉角,四元数避免了极轴锁定问题,计算更方便,尤其在处理连续旋转时表现优越。它由四个实数构成,常用于游戏开发和计算机图形学等领域。
6. 坐标系分类:空间坐标系分为左手坐标系和右手坐标系,如地心惯性坐标系(ECI,惯性参照系)和地心地球固坐标系(ECEF,地球坐标系)。ECI坐标系固定不动,而ECEF坐标系随地球自转移动,如WGS84坐标系常用于地理信息系统。
7. 刚体的位置和朝向:在自动驾驶中,汽车被视为刚体,其位置由相对于参考坐标系的三维平移向量表示,而朝向则通过刚体原点的定向来定义。刚体坐标系是基于车辆内部某个点建立的,便于局部运动分析。
通过理解和掌握这些知识点,学习者能够更好地理解Apollo自动定位技术中的数学模型和传感器融合算法,从而提高定位精度和系统的鲁棒性。
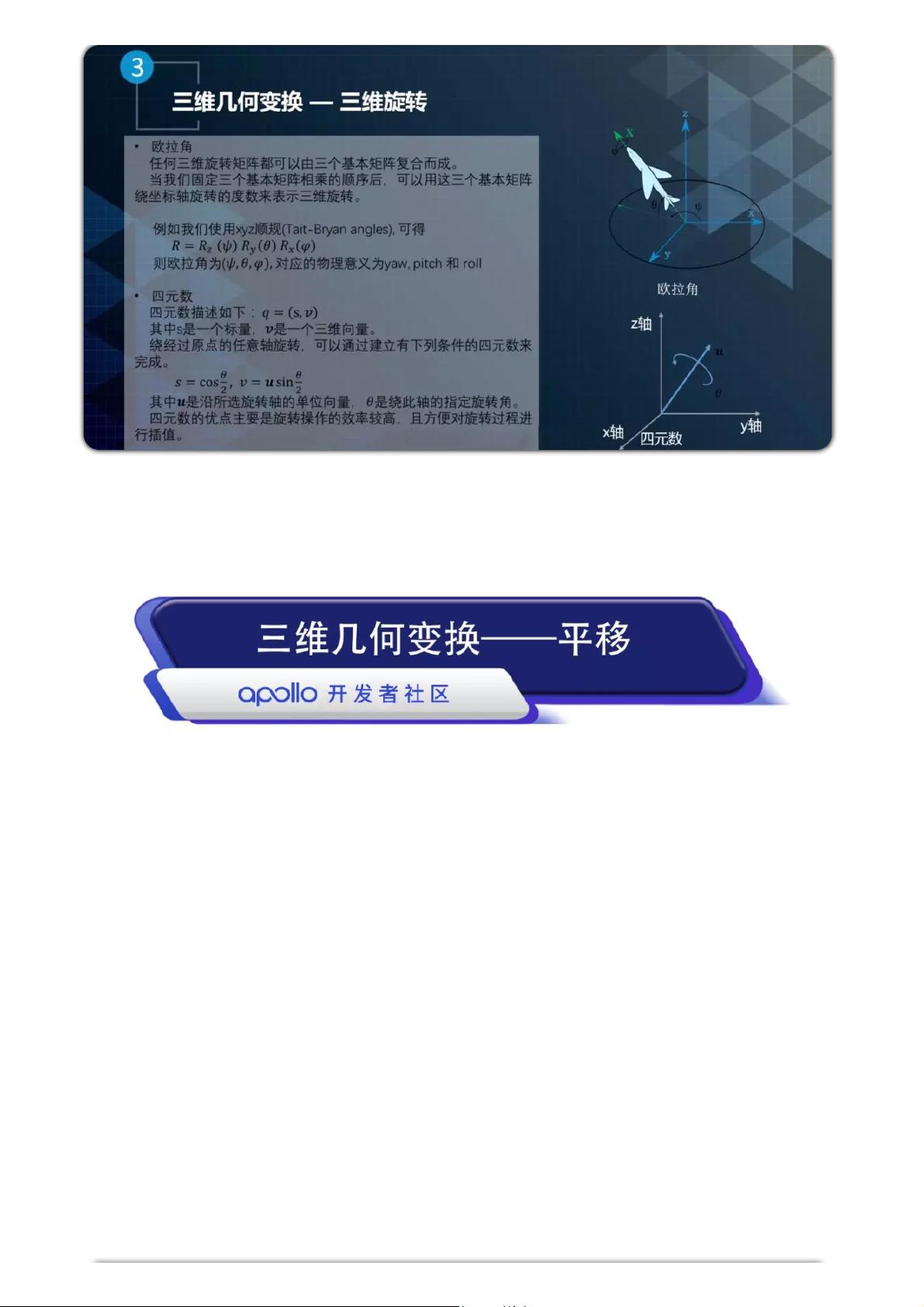
三维旋转
平移是当前点相对于坐标原点的位置变化,通常由当前位置的坐标表示,由一个3x1的向量表示,
如下所示。
剩余13页未读,继续阅读
2022-04-17 上传
2023-05-08 上传
2023-07-16 上传
2023-07-28 上传
2023-06-08 上传
2023-07-16 上传
2023-07-04 上传
2023-06-08 上传

疯狂的机器人
- 粉丝: 8846
- 资源: 152
 我的内容管理
展开
我的内容管理
展开







最新资源
- Hadoop生态系统与MapReduce详解
- MDS系列三相整流桥模块技术规格与特性
- MFC编程:指针与句柄获取全面解析
- LM06:多模4G高速数据模块,支持GSM至TD-LTE
- 使用Gradle与Nexus构建私有仓库
- JAVA编程规范指南:命名规则与文件样式
- EMC VNX5500 存储系统日常维护指南
- 大数据驱动的互联网用户体验深度管理策略
- 改进型Booth算法:32位浮点阵列乘法器的高速设计与算法比较
- H3CNE网络认证重点知识整理
- Linux环境下MongoDB的详细安装教程
- 压缩文法的等价变换与多余规则删除
- BRMS入门指南:JBOSS安装与基础操作详解
- Win7环境下Android开发环境配置全攻略
- SHT10 C语言程序与LCD1602显示实例及精度校准
- 反垃圾邮件技术:现状与前景
