
S260 CHINESE OPTICS LETTERS / Vol. 5, Supplement / May 31, 2007
Lidar signal de-noising based on discrete wavelet transform
Xiaofeng Li (
) and Ye Huang (
ÛÛÛ
)
Anhui Institute of Optics and Fine Mechanics, Chinese Academ y of Sciences, Hefei 230031
Lidar is an efficient tool for remote monitoring, but the effective range is often limited by signal-to-noise
ratio (SNR). The reason is that noises or fluctuations always strongly affect the measured results. So the
weak signal detection is a basic and important problem in the lidar systems. Through the power spectral
estimation, we find that digital filters are not suitable for processing lidar signal buried in noise. We present
a new method of the lidar signal acquisition based on discrete wavelet transform for the improvement of
SNR to increase the effective range of lidar measurements. Performance of the method is investigated by
detecting the simulating and real signals in white noise. The results of Butterworth filter, which is a kind
of finite impulse response filter, are also demonstrated for comparison. The experiment results show that
the approach is superior to the traditional methods.
OCIS co des: 280.3640, 060.4510, 010.3640.
Lidar is most widely used in atmospheric research in en-
vironments. Lidar can be used to study the high cir-
rus clouds over equatorial regions
[1]
, high-latitude polar
stratospheric clouds
[2]
, stratospheric ozone
[3]
and strato-
spheric aerosols
[4]
. Lidar is the unique detector, which
can provide us remote or selective sensing of about 20
different gaseous compounds in the atmosphere.
Lidar transmits electromagnetic radiation and mea-
sures the radiation that is scattered back to receiver. The
backscattered radiation detected by a lidar can be de-
scribed by the lidar equation. For a simple backscattered
lidar, the lidar equation can be written as
p
r
(λ
L
)=
C
R
2
h
2
O(R)
β(λ
L,R
)
4π
exp
−2
R
0
k
e
(λ
L
,R
)dR
, (1)
where p
r
(λ
L
) is the power returned to the lidar at the
laser wavelength λ
1
; C is the lidar constant; R is the
range; h = c × t
p
with t
p
being the pulse duration and c
the speed of light. The term O(R) describes the overlap
between the laser beam and the receiver field of view
and it is equal to 1 for ranges where there is complete
overlap of the laser and the receiver’s field of view. In
addition, β(λ
L,R
) stands for the combined aerosol and
molecular backscatter coefficient and k
e
(λ
L
,R) denotes
extinction coefficients at the laser wavelength λ. For an
elastic backscatter (one wavelength) lidar, this combined
backscattering can be obtained by solving the lidar equa-
tion following the method suggested by Ref. [4].
The main limitation of the effective range of lidar sys-
tem is caused by the fact that the signal-to-noise ratio
(SNR) falls rapidly with an increase of the distance R,
which involves all types of lidars
[5]
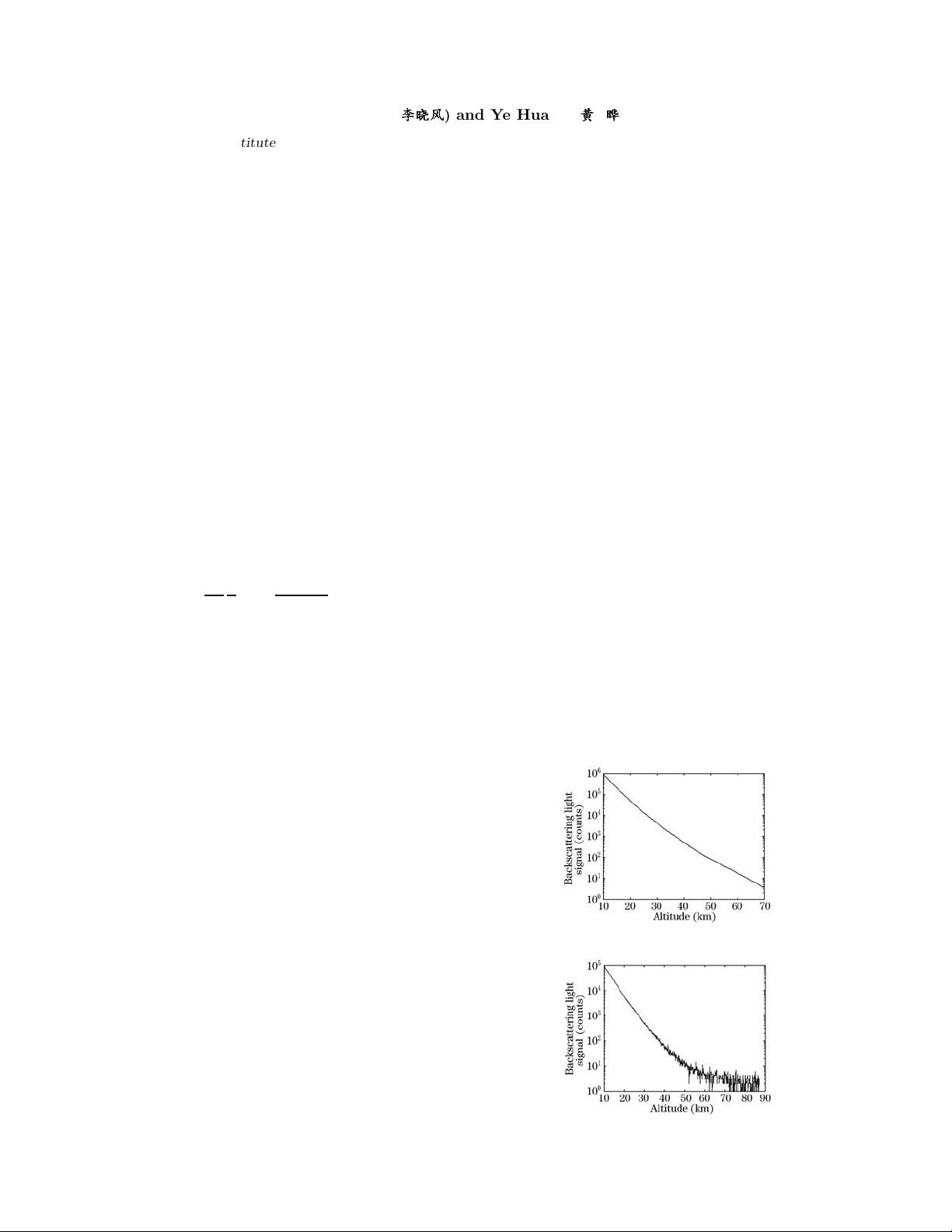
.Figure1showsa
simulating lidar signal without noise and illustrates the
characteristic of ideal lidar signal. Figure 2 shows a
real lidar signal, which backscattered by molecular and
aerosol, recorded someday by our own lidar system lo-
cated in Anhui Institute of Optics and Fine Machine
(AIOFM), Hefei, China.
In practice, several efficient procedures should be ap-
plied in order to improve the quality of lidar data. The
signal, p
r
(λ
L
), has to be achieved by averaging several
hundreds or thousands of lasers pulses. This averaging
is necessary to reduce random noise and interferences
as well as to increase the precision of digitalization. By
moving average method
[5]
, the signal is only smoothed
over the distance. So it cannot eliminate nonsensical
values (especially negative values) produced by noise.
One of the most important problems that have to be
solved with the applications of digital filters is the cor-
rect choice of the filter type and the filter parameters.
The most difficult choice is that of the cut-off frequency
of the filter. It is often selected arbitrarily or adopted
a certain theoretical model
[6−8]
. The wavelet transform
(WT) has recently become a data analysis tool in many
applications like estimation, classification, and compres-
sion. The wavelet expansions tend to concentrate the
signal energy into a relatively small number of large
coefficients. This energy concentrate property of the
WT makes the wavelet domain appropriate for signal
estimation. In this paper, we present a new method,
which based on discrete WT (DWT), to process lidar
signal de-noising and increase the effective range of li-
dar measurements. Smoothing removes high frequency
and retains low ones, de-noising attempts to remove
whatever noise is present and retain whatever signal
Fig. 1. Simulating lidar signal without noise.
Fig. 2. Real lidar signal with noise.
1671-7694/2007/S1S260-04
c
2007 Chinese Optics Letters
下载后可阅读完整内容,剩余3页未读,立即下载

weixin_38663733
- 粉丝: 3
- 资源: 902
 我的内容管理
展开
我的内容管理
展开







最新资源
- 李兴华Java基础教程:从入门到精通
- U盘与硬盘启动安装教程:从菜鸟到专家
- C++面试宝典:动态内存管理与继承解析
- C++ STL源码深度解析:专家级剖析与关键技术
- C/C++调用DOS命令实战指南
- 神经网络补偿的多传感器航迹融合技术
- GIS中的大地坐标系与椭球体解析
- 海思Hi3515 H.264编解码处理器用户手册
- Oracle基础练习题与解答
- 谷歌地球3D建筑筛选新流程详解
- CFO与CIO携手:数据管理与企业增值的战略
- Eclipse IDE基础教程:从入门到精通
- Shell脚本专家宝典:全面学习与资源指南
- Tomcat安装指南:附带JDK配置步骤
- NA3003A电子水准仪数据格式解析与转换研究
- 自动化专业英语词汇精华:必备术语集锦
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


