ROS入门教程:掌握机器人操作系统基础
"ROS基础知识教程,包括ROS的核心框架、命令行工具、ROS包和Catkin工作空间等内容。ROS是一个分布式进程框架,旨在提供硬件抽象、驱动程序管理、进程间消息传递和程序包管理。它不依赖特定编程语言,支持多种如C++、Python等,并具有点对点设计、模块化、精简集成、方便测试和丰富的工具包等特点。ROS广泛支持各种操作系统,如Ubuntu,并有众多机器人和传感器的支持,如激光雷达、摄像头、力矩传感器等。"
ROS(Robot Operating System)是一个开放源代码的软件平台,专为开发机器人应用而设计。它的核心框架是一个分布式的进程框架,允许不同的组件或节点以松散耦合的方式运行,相互之间通过消息传递进行通信。ROS不被视为一个完整的操作系统,而是提供了硬件抽象层、设备驱动、工具和库,以及一个用于构建和分发机器人软件的生态系统。
ROS的命令行工具是其基础操作的关键部分,如`roslaunch`用于启动多个节点,`rostopic`用于查看和交互话题,`rosnode`用于管理节点,以及`rosrun`用于运行ROS包中的可执行文件。掌握这些工具的使用是学习ROS的第一步。
ROS包是ROS中的基本组织单元,包含源代码、消息定义、服务定义、节点、配置文件等。它们通过`package.xml`文件进行描述,并且可以被其他包依赖。Catkin工作空间是ROS项目通常使用的构建系统,用于管理和构建ROS包。
ROS的一个显著特点是其点对点的设计,每个节点都可以独立运行并与其他节点直接通信,这种设计增强了系统的灵活性和可扩展性。同时,ROS不依赖特定的编程语言,允许开发者使用C++、Python等多种语言编写节点,促进了代码的复用和模块化。
ROS的精简与集成体现在其封装和模块化的特性上。复杂的驱动程序和算法被封装成可重用的模块,而模块化的结构使得各个部分可以独立编译和测试。测试方面,ROS提供模拟器(如Gazebo)和数据回放功能,使得开发者能够在没有实际硬件的情况下进行软件测试。
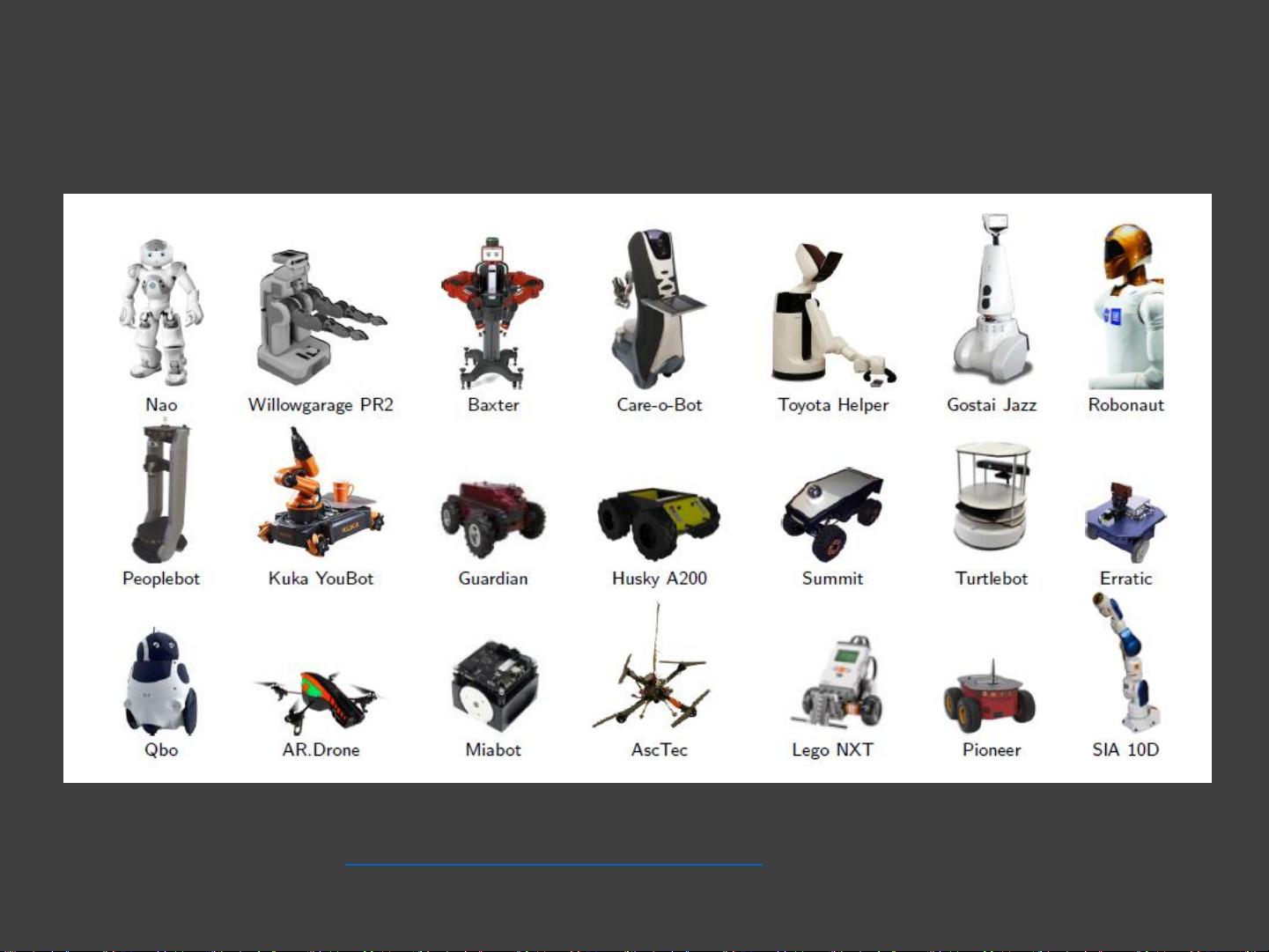
ROS还拥有丰富的工具包,如可视化工具Rviz、图形分析工具rxgraph、日志查看器roslog等,这些工具极大地简化了开发和调试过程。此外,ROS广泛支持各种操作系统,如Ubuntu(推荐使用14.04 LTS及其对应的ROS版本),并且与多种机器人硬件平台和传感器兼容,包括1D/2D/3D激光雷达、摄像头、力矩传感器、IMU/GPS等,使得ROS成为机器人开发的首选平台。

2018-04-27 上传
2018-05-06 上传
2024-09-26 上传
2024-09-26 上传
2023-05-24 上传
2024-10-06 上传
2023-07-28 上传
2023-05-24 上传
2023-06-08 上传

若谷虚怀
- 粉丝: 64
- 资源: 240
 我的内容管理
展开
我的内容管理
展开







最新资源
- 前端面试必问:真实项目经验大揭秘
- 永磁同步电机二阶自抗扰神经网络控制技术与实践
- 基于HAL库的LoRa通讯与SHT30温湿度测量项目
- avaWeb-mast推荐系统开发实战指南
- 慧鱼SolidWorks零件模型库:设计与创新的强大工具
- MATLAB实现稀疏傅里叶变换(SFFT)代码及测试
- ChatGPT联网模式亮相,体验智能压缩技术.zip
- 掌握进程保护的HOOK API技术
- 基于.Net的日用品网站开发:设计、实现与分析
- MyBatis-Spring 1.3.2版本下载指南
- 开源全能媒体播放器:小戴媒体播放器2 5.1-3
- 华为eNSP参考文档:DHCP与VRP操作指南
- SpringMyBatis实现疫苗接种预约系统
- VHDL实现倒车雷达系统源码免费提供
- 掌握软件测评师考试要点:历年真题解析
- 轻松下载微信视频号内容的新工具介绍
