基于单片机的智能铁甲虫机器人控制与仿真设计
版权申诉
42 浏览量
更新于2024-06-23
收藏 1.21MB DOC 举报
本文主要探讨了机械机器人模拟仿真设计,特别是在学校实验室中常见的6脚柱状铁甲虫机器人(HexRod HD Hexapod Robot)的应用与控制系统设计。该研究以单片机(51单片机)为核心技术,结合电子电路知识,旨在构建一个智能移动机器人的控制系统,使得机器人能够在实际环境中实现智能移动、步态调整以及自主避障功能。
首先,硬件部分的构建是基础。文章详细描述了机器人结构,包括六足设计,每足的驱动机制以及传感器的集成,如用于感知环境的红外或超声波传感器,这些传感器是实现智能避障的关键组件。通过这些传感器,机器人能够实时获取周围环境的信息,做出相应的决策和行动。
软件设计是整个控制系统的核心,利用51单片机处理传感器数据,解析指令,并控制电机驱动机器人移动。设计中包含了基本的编程逻辑,如状态机控制,以实现机器人的步行模式和速度控制。同时,软件也需处理用户输入,比如通过按钮开关来临时改变机器人的运动路径或停止运动。
然而,实验过程中发现,由于机器人自身的质量较重,电机提供的动力有限,导致机器人移动速度相对较慢,动作不够流畅。这提示我们在设计时需要考虑到机器人的负载能力和动力系统的选择,以提升其性能。
本文的研究重点在于理论知识的实践应用,强调了将单片机、传感器技术和控制算法有效地整合,以实现具有自主性和智能化的机器人行为。尽管存在一些挑战,但通过不断的优化和改进,机械机器人模拟仿真设计在未来有望在诸多领域如制造业、医疗、服务等得到广泛应用,进一步推动科技进步。

单有这些硬件是不够的,机器人的大脑还无法运行。只有在程序的控制下,
它才能按我们的要求去工作。可以说程序就是机器人的灵魂了。而程序是由编程
语言所编写的。
编程语言是一个控制器能够接受的语言类型,一般有 C 语言,汇编语言或
者 basic 语言等,这些通常能被高级一点的控制器直接执行,因为在高级控制器
里面内置了编译器能够直接把一些高级语言翻译成机器码。微处理器将执行这些
机器码,并对机器人进行控制。
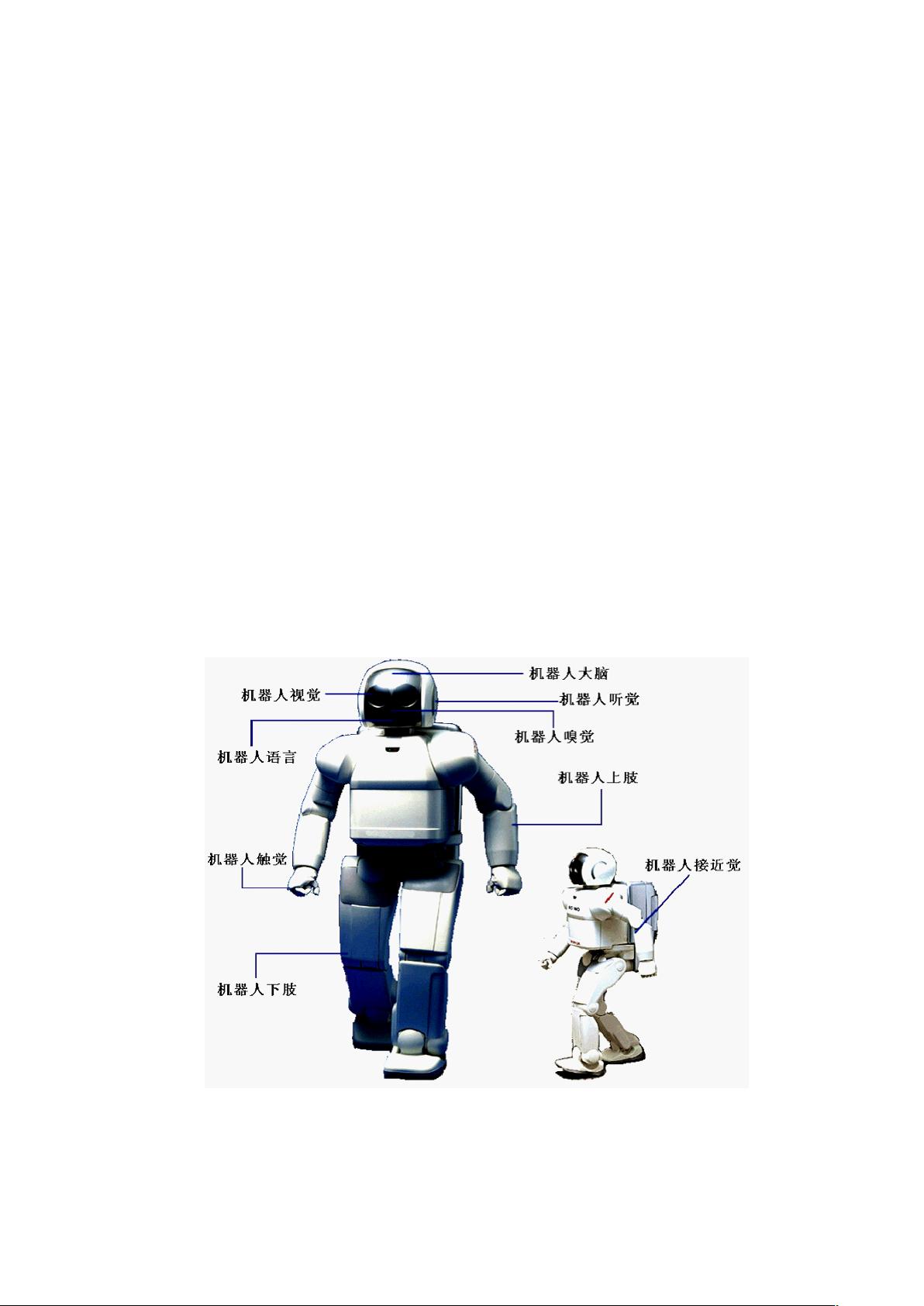
1.2.2 机器人传感器技术
机器人是由计算机控制的复杂机器,它具有类似人的肢体及感官功能;动作
程序灵活;有一定程度的智能;在工作时可以不依赖人的操纵。机器人传感器在
机器人的控制中起了非常重要的作用,正因为有了传感器,机器人才具备了类似
人类的知觉功能和反应能力。其主要有:光电传感器、红外传感器、力传感器、
超声波传感器、位置传感器和姿态传感器等等。下面我将就几种常用传感器进行
介绍:
1、光电传感器:采用光电元件作为检测元件的传感器。它首先把被测量的
变化转换成光信号的变化,然后借助光电元件进一步将光信号转换成电信号。光
电传感器一般由光源、光学通路和光电元件三部分组成。
2、红外传感器:红外传感器是用来测量距离和感知周围情况的。因为发射
出去的红外信号在一定距离内遇到物体就会反射回来。通过发送红外线信号,并
接收反射回来的信号,机器人就可以感知前方或身体周围的情况,做出相应的调
整(如:倒退或绕行等)。
3、力传感器:能感受外力并转换成可用输出信号的传感器,比如机械手的
应用,当你放一个东西到机械手的时候,机械手自动抓住它,它就需要力传感器
检测东西抓的紧不紧。典型的力传感器是微动开关和压敏传感器。
4、超声波传感器:利用超声波检测技术,将感受的被测量转换成可用输出
信号的传感器。超声波是一种振动频率高于声波的机械波,由换能晶片在电压的
激励下发生振动产生的,它具有频率高、波长短、绕射现象小,特别是方向性好、
能够成为射线而定向传播等特点。

剩余51页未读,继续阅读
2022-06-30 上传
2023-07-11 上传
2023-07-11 上传
2021-09-16 上传
2022-06-23 上传
2023-02-27 上传
2021-09-21 上传

老帽爬新坡
- 粉丝: 93
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
