实时路径规划算法:off-road自动驾驶与静态障碍物避免
需积分: 9 149 浏览量
更新于2024-07-18
收藏 2.97MB PDF 举报
"这篇论文关注的是『local Path Planning』,针对的是非道路环境下的自动驾驶路径规划,特别是如何避免静态障碍物。发表在2012年12月的《IEEE Transactions on Intelligent Transportation Systems》第13卷第4期,作者是Keonyup Chu、Minchae Lee和Myoungho Sunwoo,均为IEEE会员。论文的核心内容是提出了一种实时路径规划算法,旨在为自动驾驶车辆提供在存在静态障碍物情况下的最优路径。
该算法的基础是预先定义的一系列路标(waypoints),这些路标构成了一个曲线线性坐标系统,用于生成车辆行驶的可能路径候选。每个候选路径首先被转换到笛卡尔坐标系下,然后利用障碍物数据进行评估。安全性、平顺性和路径一致性是决定每个路径优先级的关键因素。通过考虑这些因素,算法能够有效地选择最安全、最平滑且连续的行驶路线。
值得一提的是,该路径规划算法被成功应用于2010年韩国现代-起亚汽车集团举办的自动驾驶车辆竞赛中的A1参赛车型。这表明了该方法在实际应用中的可行性和有效性,对于推动自动驾驶技术的发展具有重要意义。
本文的研究不仅提供了理论上的路径规划策略,还展示了其在实际自动驾驶系统中的实践效果,对提高车辆在复杂环境中自主导航的能力具有重要的参考价值。"
1602 IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS, VOL. 13, NO. 4, DECEMBER 2012
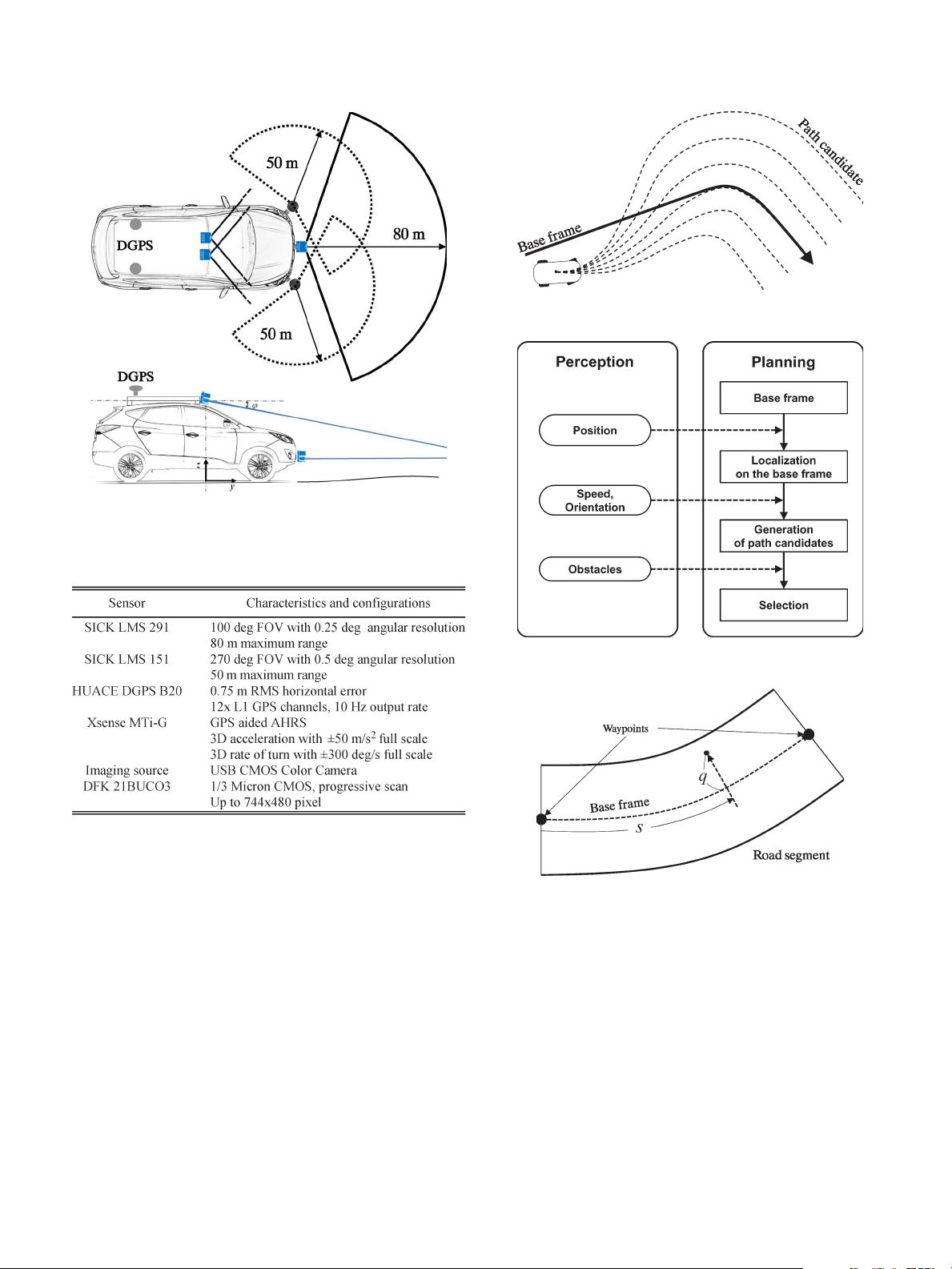
Fig. 3. Sensor installation of A1.
TABLE I
S
ENSORS INCORPORATED INTO A1
three laser-radars that were mounted on the front bumper have
different ranges: the maximum range of the center laser radar is
80 m, whereas the maximum range of the side laser radars is
50 m. Data from each laser-radar were processed to remove er-
roneous information such as ground clutter caused by the pitch
motion of the vehicle [22]. The processed obstacle data were
used to construct the cell-based local map, which is utilized by
the path planner of the A1 to evaluate the path candidates. For
the evaluation of the path candidates, the maximum distance of
path was limited to 50 m, which relies on the detection distance
of the laser scanner of the A1.
B. Structure of the Path-Planning Algorithm
The goal of the path-planning algorithm of A1 is to generate
asmoothpathfromtheinitialvehicleconfigurationtowardthe
direction of the global route. An illustration of the concept of
path planning is shown in Fig. 4. The path-planning algorithm
generates path candidates with different offsets from the base
Fig. 4. Base frame and candidate paths.
Fig. 5. Path-planning strategy.
Fig. 6. Road segment and curvilinear coordinate system.
frame. The algorithm is decomposed into the following four
components.
1) construction of the base frame;
2) localization on the base frame;
3) generation of path candidates;
4) selection.
These components are shown in Fig. 5. The base frame is
constructed by a spline, which is based on a set of waypoints
that contains the center position of the road, as shown in Fig. 6.
To utilize the road shape from the base frame, the position
of the vehicle is determined on the base frame during the
localization step. The path candidates are then generated by
the forward integration of the model using the base frame,
current vehicle speed, and orientation. From this set of paths,
one path is selected, which minimizes the cost function of the
剩余17页未读,继续阅读
2010-10-22 上传
2021-03-15 上传
2023-05-27 上传
2023-03-16 上传
2024-08-30 上传
2024-07-03 上传
2023-05-25 上传
2024-06-25 上传

lx627776548
- 粉丝: 15
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 计算机人脸表情动画技术发展综述
- 关系数据库的关键字搜索技术综述:模型、架构与未来趋势
- 迭代自适应逆滤波在语音情感识别中的应用
- 概念知识树在旅游领域智能分析中的应用
- 构建is-a层次与OWL本体集成:理论与算法
- 基于语义元的相似度计算方法研究:改进与有效性验证
- 网格梯度多密度聚类算法:去噪与高效聚类
- 网格服务工作流动态调度算法PGSWA研究
- 突发事件连锁反应网络模型与应急预警分析
- BA网络上的病毒营销与网站推广仿真研究
- 离散HSMM故障预测模型:有效提升系统状态预测
- 煤矿安全评价:信息融合与可拓理论的应用
- 多维度Petri网工作流模型MD_WFN:统一建模与应用研究
- 面向过程追踪的知识安全描述方法
- 基于收益的软件过程资源调度优化策略
- 多核环境下基于数据流Java的Web服务器优化实现提升性能
