"ROS机器人操作系统基础教程,适合ROS初学者,详细讲解ROS基础知识,包括ROS文件系统、软件包创建与编译。"
ROS机器人操作系统(Robot Operating System,简称ROS)是一个开源操作系统,专为机器人设备和软件开发设计。这篇教程旨在帮助初学者全面了解并掌握ROS的基础知识。
一、ROS文件系统和软件包简介
ROS的文件系统结构是其核心组成部分之一,它以一种有组织的方式管理着所有软件包和相关资源。主要包含以下几个关键概念:
1. 软件包集(Stacks):软件包集是一组具有共同功能的软件包集合,如ROS中的导航软件包集,提供了路径规划和导航功能。
2. 软件包(Packages):ROS中的基本代码组织单元,包含程序库、可执行文件、脚本等,每个软件包都有自己的作用和功能。
3. package.xml:每个软件包都包含一个package.xml文件,记录软件包的元信息,如版本、作者、依赖关系等。
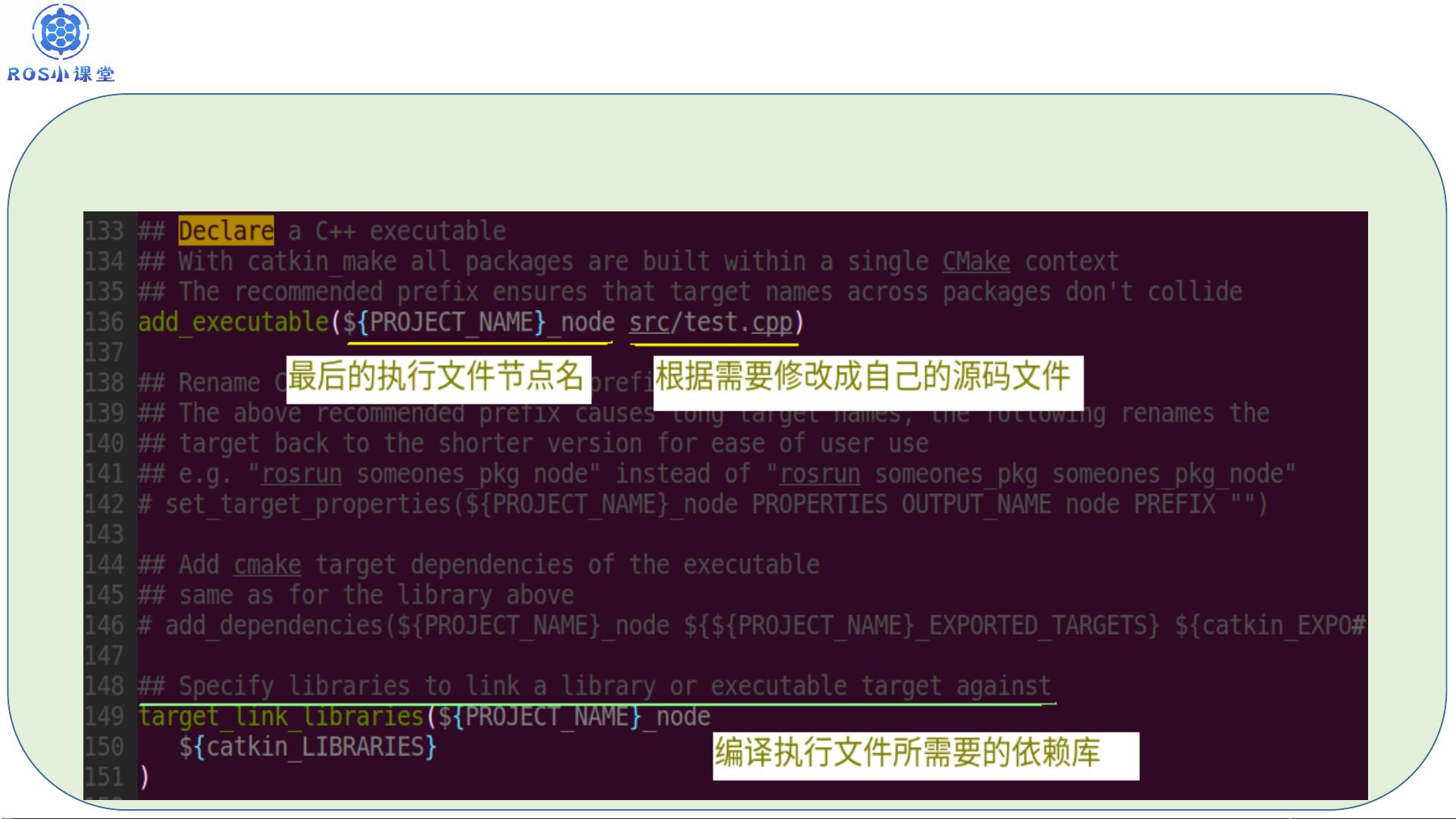
4. CMakeLists.txt:这是编译配置文件,指导cmake构建工具生成Makefile,进而编译和链接源代码。
二、创建和编译ROS软件包
学习ROS时,理解如何创建和管理软件包至关重要:
1. 工作空间(Workspace):工作空间是存放多个软件包的地方,可以独立编译和管理。
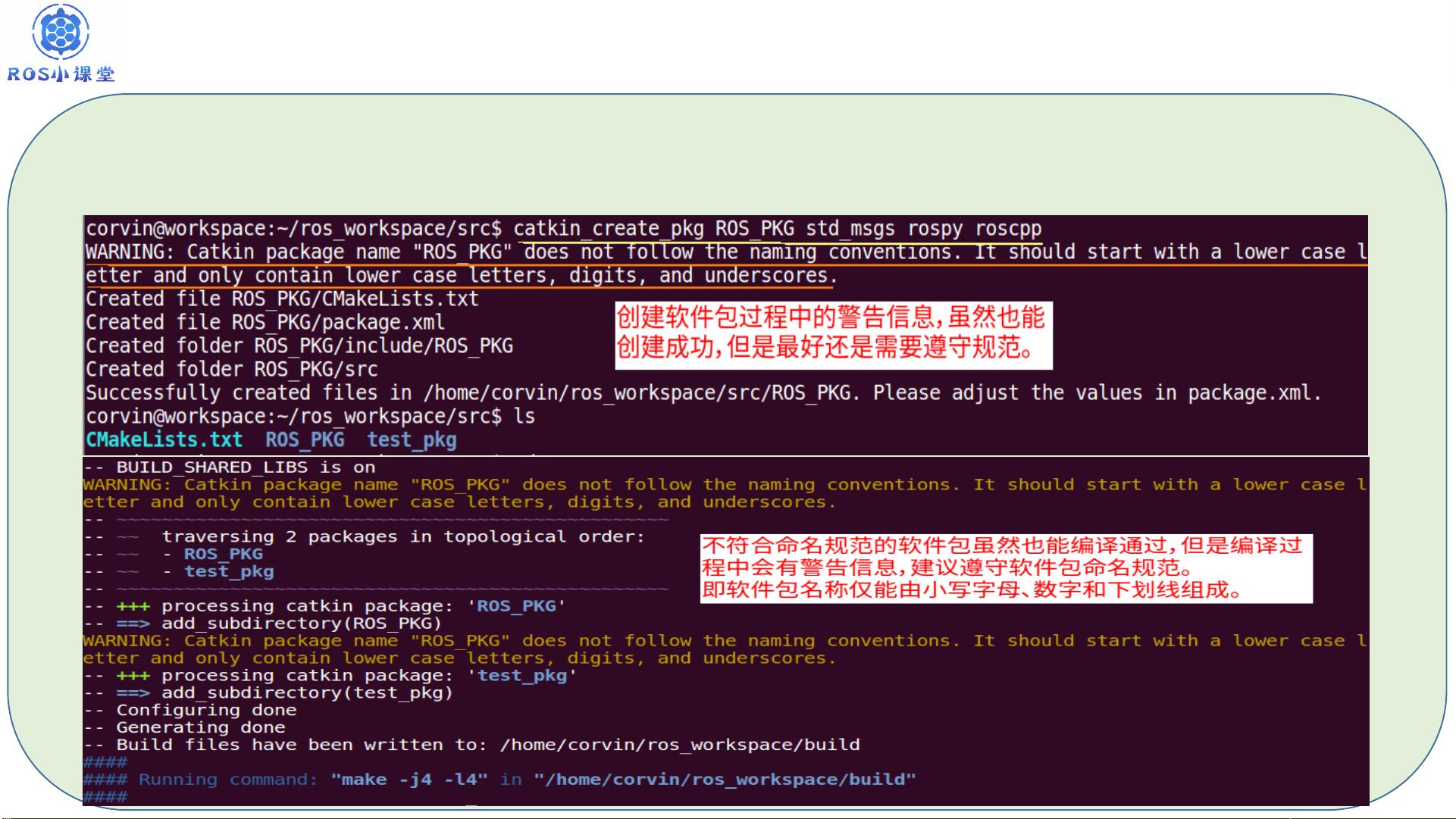
2. 创建软件包:首先,需要创建一个新的工作空间,然后在工作空间内创建软件包,通过roscreate-pkg或catkin_create_pkg命令完成。
3. 软件包依赖:在package.xml中定义软件包的依赖,包括编译时依赖和运行时依赖。
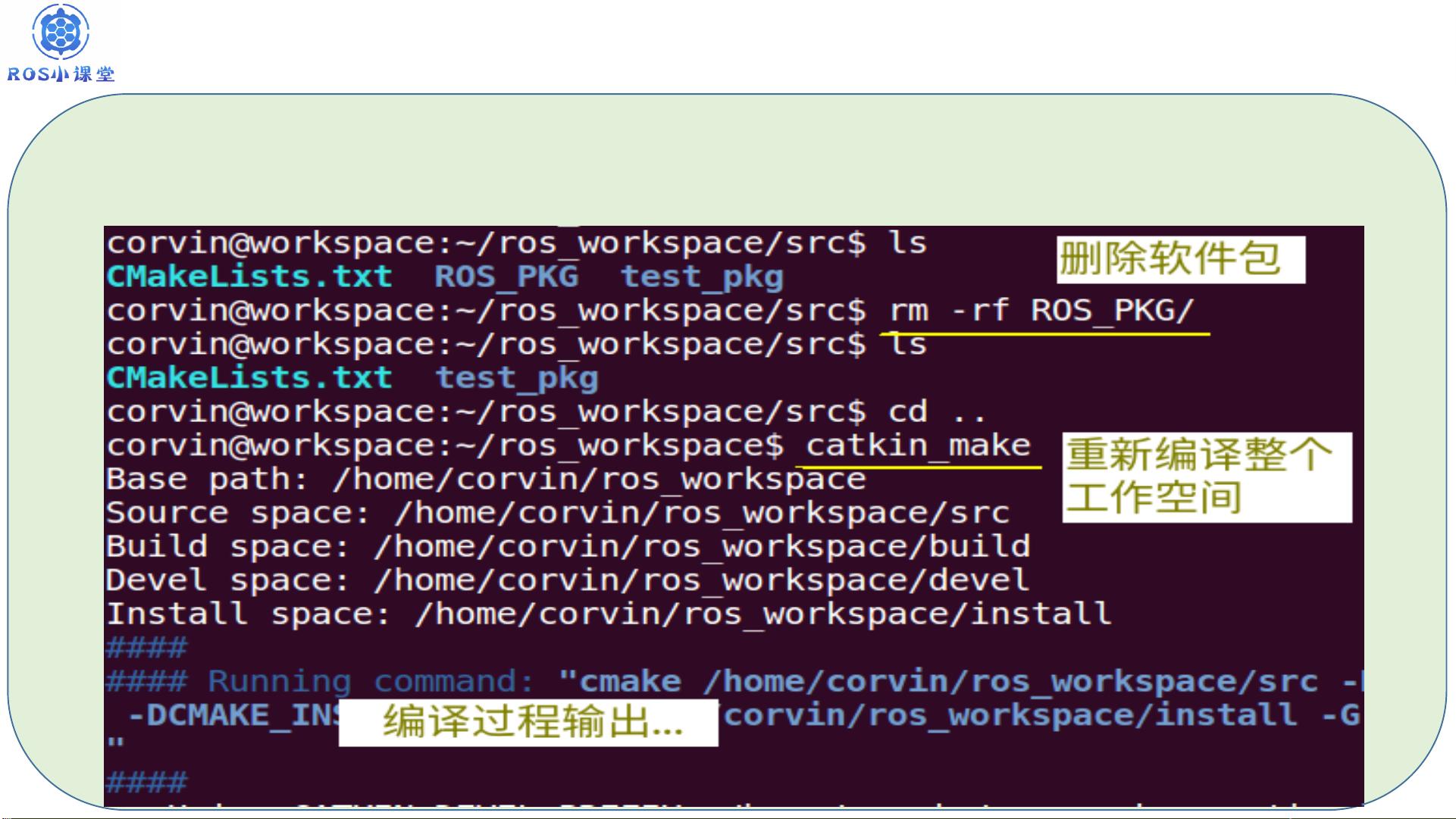
4. 删除软件包:使用rm或rmdir命令可以从工作空间中移除不需要的软件包。
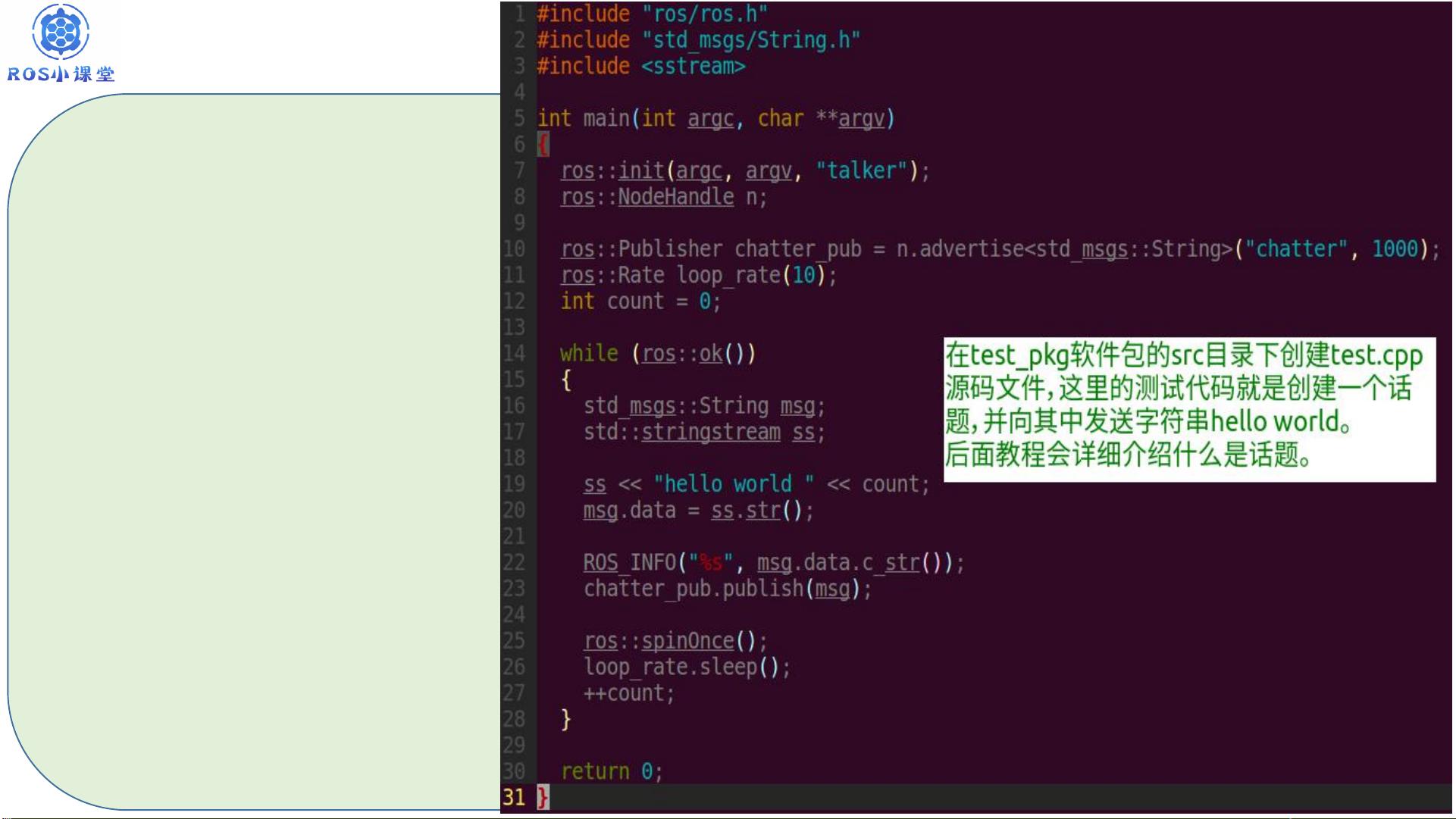
5. 编写代码:在软件包的src目录下编写ROS相关的代码,如节点(Nodes)、消息(Messages)、服务(Services)等。
6. 编译软件包:通过catkin_make或catkin build命令编译整个工作空间或单个软件包,将源代码转化为可执行文件。
7. 运行节点:使用rosrun命令运行编译后的节点,执行ROS系统的特定任务。
三、编译工具catkin
catkin是ROS中用于构建和管理软件包的工具,它简化了CMakeLists.txt的编写,并能处理复杂的项目依赖关系。catkin的工作流程如下:
1. gcc是GNU编译器,用于编译单个源文件。
2. make工具则用于管理和编译多源文件项目,它根据makefile中的指令进行编译和链接。
3. makefile定义了编译规则,但编写复杂的makefile可能很困难且易出错。
4. cmake是跨平台的自动化构建系统,它可以生成特定平台的makefile或IDE项目文件,简化了大型项目的构建过程。
ROS的学习始于对文件系统和软件包的理解,以及如何创建、编译和运行这些软件包。这个基础教程将引导初学者逐步熟悉ROS环境,为更深入的机器人编程打下坚实基础。


 我的内容管理
展开
我的内容管理
展开









