"MPU6050中文版使用说明书提供了关于如何使用MPU6050六轴惯性导航模块的详细指南,包括通信协议、数据解析代码和硬件连接方法。该模块集成高精度陀螺仪和加速度计,通过串口输出测量数据,简化了对I2C协议的开发。内部设有电压稳定电路,兼容3.3V/5V系统,具有先进的数字滤波技术和动态卡尔曼滤波算法,以确保高精度姿态解算。模块尺寸小巧,适合嵌入式应用,提供串口和I2C接口,数据输出频率可达100Hz。"
MPU6050是一款高精度的六轴惯性测量单元(IMU),包含3轴陀螺仪和3轴加速度计,用于检测设备的角速度和线性加速度。这款模块通过处理器读取MPU6050的数据并处理,然后通过串行通信接口(如UART)以串口(TTL电平)输出,便于用户接收和解析。模块内部的电压稳定电路使得它能适应不同电压的嵌入式系统,同时优化的PCB设计减少了外部干扰,提高了测量精度。
在性能参数方面,MPU6050支持3V至6V的工作电压,功耗小于10mA,尺寸仅为15.24mm x 15.24mm x 2mm。焊盘间距符合标准,便于焊接。模块能够测量三个维度的加速度(±2g)和角速度(±250°/s),并提供高分辨率的输出:加速度为6.1e-5g,角速度为7.6e-3°/s。其稳定性分别达到0.001g和0.02°/s,而姿态测量的稳定度更是高达0.01°,这意味着在动态环境中也能得到准确的三维姿态信息。
数据输出频率有两种选项:100Hz(波特率115200bps)和20Hz(波特率9600bps)。模块还保留了I2C接口,允许高级用户访问底层传感器数据。通信接口包括VCC(模块电源)、RX(串行数据输入)、TX(串行数据输出)、GND(接地)、SCL(I2C时钟线)和SDA(I2C数据线)。
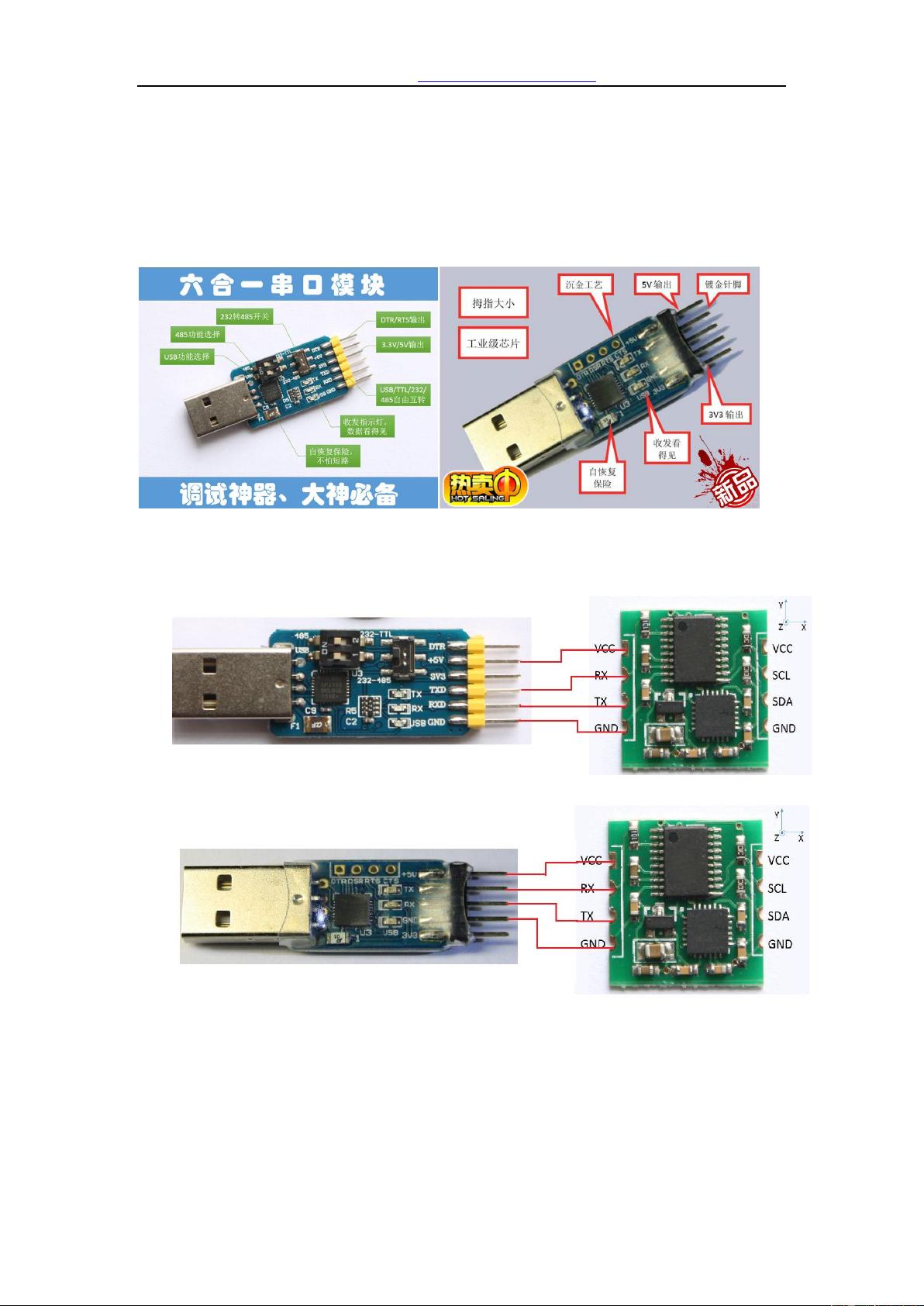
硬件连接时,MPU6050可与计算机或其他设备通过USB转串口模块进行连接。例如,用户可以使用USB转TTL电平的串口模块,将模块的VCC、RX、TX、GND、SCL和SDA对应连接到转换模块的相应引脚。
MPU6050中文版使用说明书提供了一个全面的指南,帮助用户理解和应用这款高性能的六轴IMU模块,无论是初学者还是高级开发者,都能从中获取必要的信息以实现精确的运动追踪和姿态测量。