ROS报错解决:manipulation_msgs与household_msgs缺失及环境变量问题
 已收录资源合集
已收录资源合集
下载需积分: 0 | DOCX格式 | 1.76MB |
更新于2024-08-04
| 108 浏览量 | 举报
"这篇文档是关于ROS (Robot Operating System) 报错问题的解决方法,主要聚焦于胡春旭的《ROS机器人开发实践》一书中的第十章MoveIt!示例。作者在尝试运行`roslaunch marm_description view_arm.launch`时遇到了问题,并提供了相应的解决方案。"
在ROS开发过程中,报错是常见的情况,尤其是在执行特定的包或功能时。本文档列举了在执行`MoveIt!`时遇到的两个主要问题以及它们的解决步骤。
问题A涉及找不到`manipulation_msgs`包。这个问题可以通过将该包克隆到工作空间的`src`目录下并重新编译来解决。首先,使用`git clone`命令从GitHub仓库(https://github.com/ros-interactive-manipulation/manipulation_msgs.git)克隆`manipulation_msgs`到你的`catkin_ws/src`目录。然后在工作空间中执行`catkin_make`进行编译。
问题B与问题A类似,找不到`household_msgs`包。解决方法同样是将其从GitHub(https://github.com/ros-interactive-manipulation/household_objects_database_msgs.git)克隆到`src`目录,并执行编译过程。
值得注意的是,仅通过`source devel/setup.bash`命令设置的环境变量可能只在当前终端会话中有效。如果在新的终端窗口中运行命令,这些环境变量不会被加载。为了解决这个问题,需要编辑用户的`.bashrc`文件(使用`gedit ~/.bashrc`打开),并在文件末尾添加两行代码,指定你的ROS工作空间路径(例如`~/catkin_ws_cha10`)以及更新`ROS_PACKAGE_PATH`。保存修改后,重启`.bashrc`(使用`source ~/.bashrc`),然后检查ROS路径是否已正确添加。
在问题描述的最后部分,提到了尝试运行`rosrun moveit_setup_assistant moveit_setup_assistant`命令时遇到了 `[registerPublisher]` 错误,但这里没有提供具体的解决方法。通常,这个错误可能是因为缺少依赖、环境变量未设置或者网络问题。解决这类问题通常需要检查依赖项是否安装完整,确保所有必要的ROS节点和服务都能正常启动和通信。
通过理解和解决这些ROS报错,开发者可以更好地掌握如何调试和优化ROS系统,这对于进行ROS相关的机器人开发至关重要。不断积累和学习这类问题的解决方案,能有效提高开发效率,减少因错误而浪费的时间。
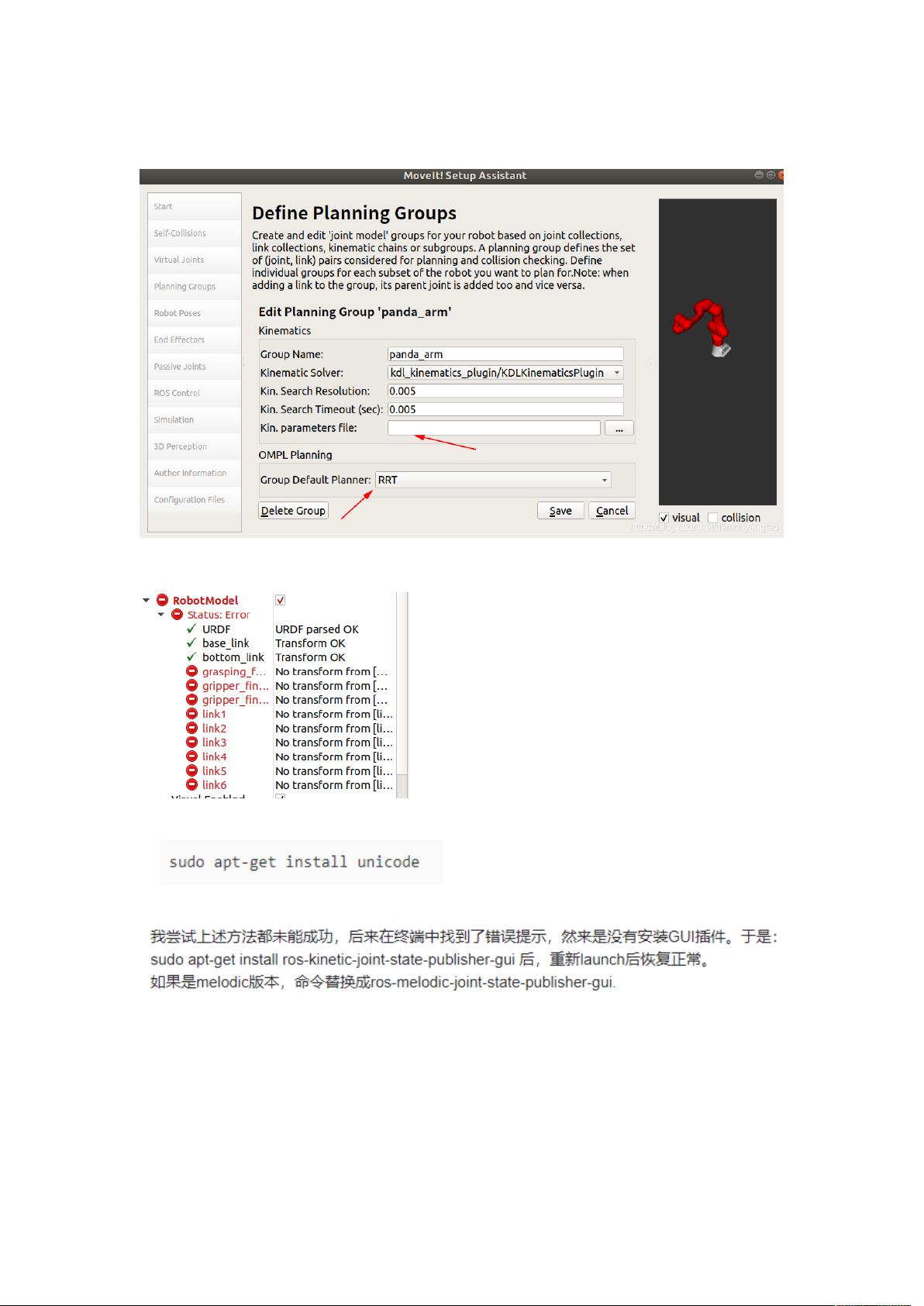
在规划组 planning groups 的机器人运动链定义中,OMPL planning 要选择 RRT。即要给定规
划的方式。
(3)启动 RVIZ 时,机器人无法加载 transform,即无法读取连杆间的转换关系。
三个内容:
A.
B.
C.在.launch 文件中添加如下两个节点:
<node pkg="robot_state_publisher" type="robot_state_publisher"
name="robot_state_publisher"></node>
<node name="joint_state_publisher" pkg="joint_state_publisher"
type="joint_state_publisher" ></node>
剩余12页未读,继续阅读
相关推荐



呆呆美要暴富
- 粉丝: 37
 我的内容管理
展开
我的内容管理
展开







最新资源
- Node.js基础代码示例解析
- MVVM Light工具包:跨平台MVVM应用开发加速器
- Halcon实验例程集锦:C语言与VB的实践指南
- 维美短信API:团购网站短信接口直连解决方案
- RTP转MP4存储技术解析及应用
- MySQLFront客户端压缩包的内容分析
- LSTM用于PTB数据库中ECG信号的心电图分类
- 飞凌-MX6UL开发板QT4.85看门狗测试详解
- RepRaptor:基于Qt的RepRap gcode发送控制器
- Uber开源高性能地理数据分析工具kepler.gl介绍
- 蓝色主题的简洁企业网站管理系统模板
- 深度解析自定义Launcher源码与UI设计
- 深入研究操作系统中的磁盘调度算法
- Vim插件clever-f.vim:深度优化f,F,t,T按键功能
- 弃用警告:Meddle.jl中间件堆栈使用风险提示
- 毕业设计网上书店系统完整代码与论文
