FP-Radar:浏览器指纹的长期监测与早期预警系统
版权申诉
160 浏览量
更新于2024-07-07
收藏 974KB PDF 举报
"FP-Radar Longitudinal Measurement and Early Detection of Browser Fingerprinting"
浏览器指纹追踪是一种无状态的跟踪技术,它通过结合多个不同Web API暴露的信息来创建一个独特的标识符,以此来追踪用户在网络上的行为。过去十年间,追踪者已经滥用了许多现有的和新提出的Web API来增强浏览器指纹。然而,现有的方法主要限于在特定时间点检测特定的指纹技术,无法系统地发现利用不同Web API的新颖或演变中的浏览器指纹技术。
在本文中,作者提出了FP-Radar,这是一种基于机器学习的方法,它利用过去十年来对顶级100K网站上Web API使用的纵向测量数据,用于早期检测新型和演进的浏览器指纹技术。研究表明,FP-Radar能够早期发现已知API(例如,WebGL、Sensor)新引入属性的滥用,以及新API的潜在利用,这使得它在对抗不断变化的隐私侵犯策略方面具有显著优势。
FP-Radar的工作原理可能包括以下几个关键步骤:
1. 数据收集:系统定期抓取并记录顶级网站上所有Web API的使用情况,包括API调用的频率、参数和返回值等信息。
2. 特征工程:通过对收集到的数据进行分析,提取出与浏览器指纹关联的关键特征,如API的使用模式、组合和变化趋势。
3. 模型训练:使用历史数据训练机器学习模型,使模型能够识别出与浏览器指纹相关的异常行为。
4. 实时监测:在模型训练完成后,FP-Radar会对新的Web API使用情况进行实时监测,通过对比模型预测的正常行为,识别出可能的指纹追踪技术。
5. 早期预警:一旦检测到潜在的新型指纹技术,系统会发出预警,以便研究人员和开发者可以及时采取措施,限制这些技术的滥用。
6. 动态更新:FP-Radar的机器学习模型会随着新数据的流入而不断更新,以适应Web API和浏览器指纹技术的快速演变。
FP-Radar提供了一个全面且动态的解决方案,它不仅能够检测当前的浏览器指纹追踪技术,还能预见未来可能出现的威胁,对于提升网络隐私保护能力具有重要意义。这样的工具对于监管机构、浏览器开发商以及关心在线隐私的普通用户都具有极高的价值。
FP-Radar: Longitudinal Measurement and Early Detection of Browser Fingerprinting 5
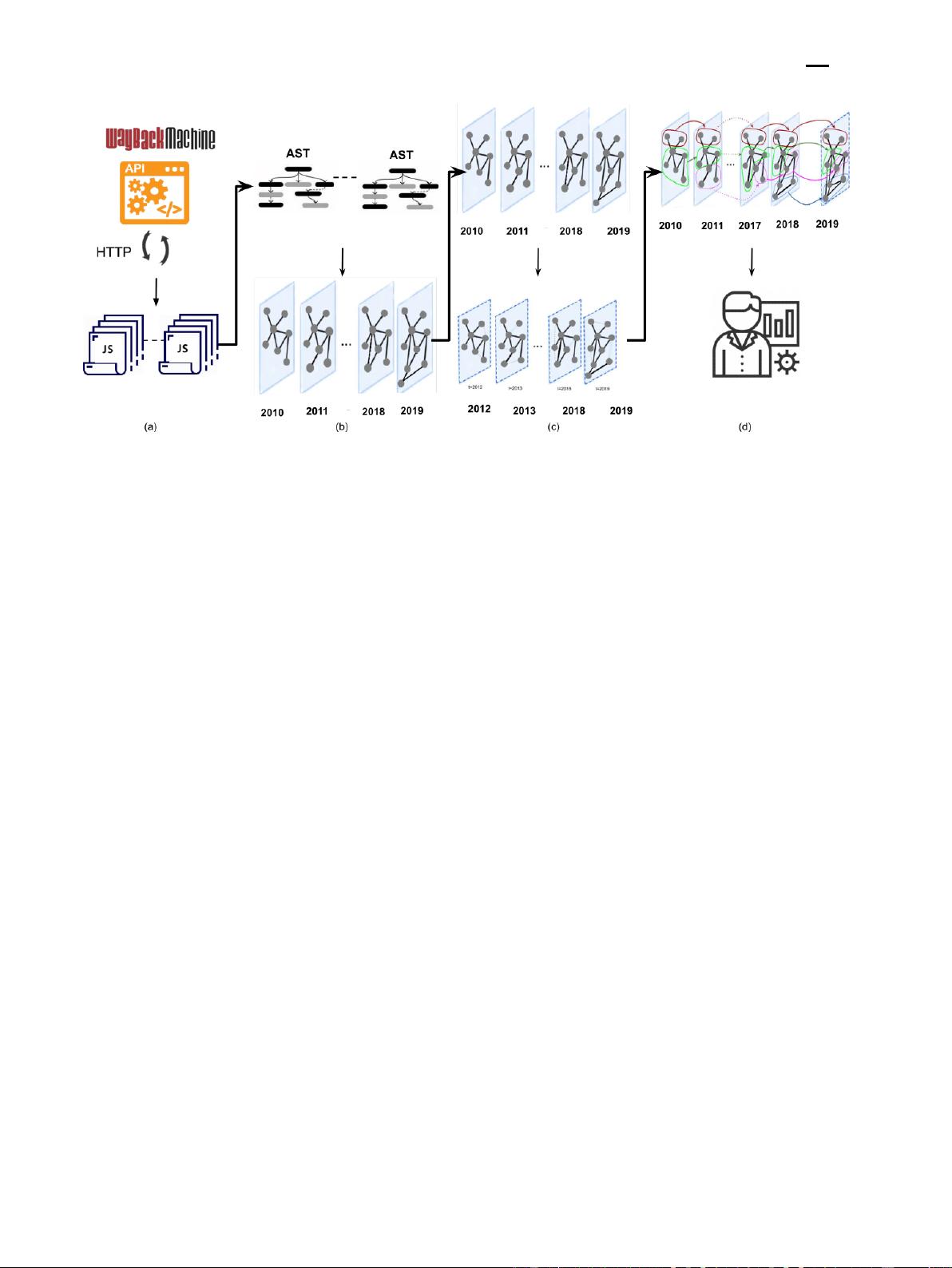
Fig. 2. FP-Radar: (a) We use the Wayback Machine to crawl historical snapshots of scripts present on Alexa top-100K websites from
2010 to 2019, (b) We first create AST representation of crawled scripts to extract web API keywords, we then model the temporal
co-occurrence of web APIs in scripts in a graph representation, (c) We leverages the temporal graph representation to predict future
co-occurrence of web API keywords, (d) We first leverage the predicted co-occurrence to cluster web APIs based on their functionality,
we then analyze the temporal clusters to detect abuse of specific API keywords for browser fingerprinting.
Wayback Machine crawl statistics. Despite the
aforementioned completeness issues in the Wayback Ma-
chine’s crawls, we are able to longitudinally crawl yearly
snapshots of almost 100K scripts from the Wayback Ma-
chine over the last decade (2010–2019). Based on clas-
sification of [103], this includes 1,658 fingerprinting and
92,193 non-fingerprinting scripts from our initial live
crawl. Note that we use a two step process to crawl the
Wayback Machine: we first fetch the URLs that point
to the historical snapshots of scripts [105] and then send
requests for those URLs to gather their script content.
The first step returns URLs with the timestamp and
the hash digest of the script content. The timestamps
enables us to crawl scripts that are one year apart from
each other and the hash digest helps us avoid crawling
duplicate scripts in the second step.
We acknowledge that FP-Radar’s longitudinal
data collection misses a substantial number of scripts
due to the completeness issues in the Wayback Ma-
chine. Specifically, with reference to our initial live crawl,
we note that FP-Radar is unable to crawl snapshots
of 43.09% of the scripts from the Wayback Machine.
While not ideal, we do not observe any bias in the miss-
ing scripts. Specifically, both fingerprinting and non-
fingerprinting scripts are missed with roughly the same
proportion, i.e., 43.60% and 46.74%, respectively. More-
over, despite the missing data, FP-Radar’s longitudi-
nal data collection is able to capture the overall trend
of increasing adoption of browser fingerprinting over the
years. Specifically, we observe fingerprinting scripts on
1.16% and 3.70% of the top-100K websites in 2016 and
2018, respectively. This corroborates with the findings of
prior studies of browser fingerprinting, which reported
that 1.43% of the top-million [25] and 3.69% of the top-
100K [17] websites conduct browser fingerprinting in
2016 and 2018, respectively. Thus, we conclude that FP-
Radar’s longitudinal data collection using the Wayback
Machine is sufficient for us to retrospectively study the
evolution of browser fingerprinting and draw meaningful
conclusions. We discuss alternates to the Wayback Ma-
chine and ideas to improve completeness of longitudinal
crawls in Section 5.
3.1.2 Graph Representation
To model guilt by association, we represent web API co-
occurrence in a graph. Specifically, we model API key-
words as nodes and include an edge between the nodes
if the API keywords co-occur in the same script. We
further weigh the edges based on the normalized co-
occurrence frequency.
API keyword extraction. To extract API keywords
from scripts, we model script text in abstract syn-
tax trees (ASTs) that normalize scripts for developer
剩余20页未读,继续阅读
2018-08-30 上传
2023-06-12 上传
2023-05-13 上传
2023-03-30 上传
2023-07-12 上传
2023-07-11 上传
2023-04-10 上传
2023-04-05 上传
2023-05-14 上传


易小侠
- 粉丝: 6547
- 资源: 9万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
