

Chapter 1
Introduction
A fundamental motivation of machine learning (ML) is to discover solutions to significant real-
world problems. An important class of such problems requires discovering behavior policies for
autonomous agents such as vehicles, robots, and game characters automatically. Consider for ex-
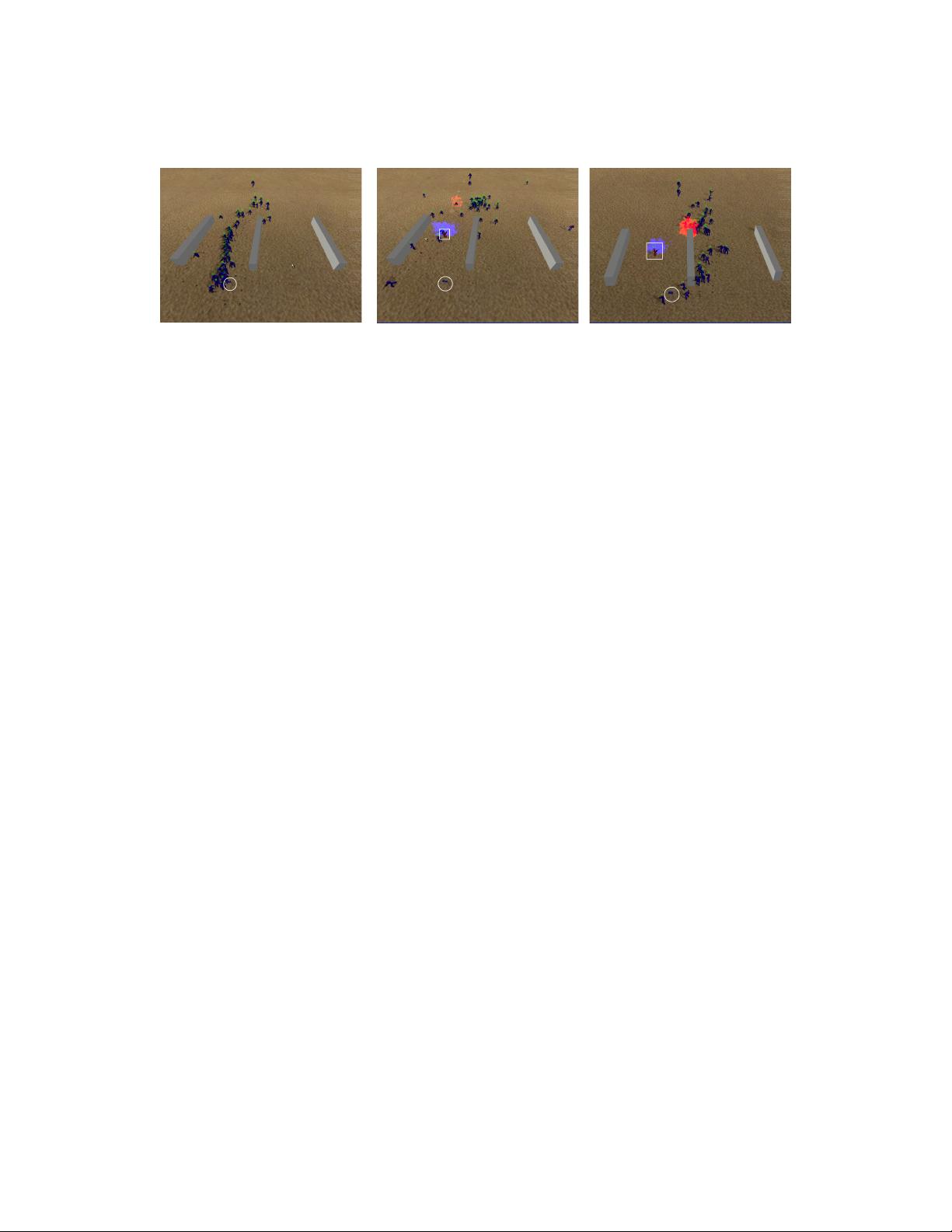
ample the challenging goal of creating a video game in which characters learn on their own to
adapt to the player’s behavior (figure 1.1). As soon as human players begin to exploit characters’
weakness, they could change their strategies and the game would become challenging again. Such
a technology would allow the game to remain interesting far longer than today’s games, and such
games could even be used effectively to train people in various interactive real world tasks.
ML is necessary for such a system: Without learning, developers would need to script all
possible contingencies into the system a priori, and have the system switch among them in reaction
to players’ behavior. In addition, many sophisticated strategies are difficult to program or even
envision, and would only be possible to achieve through learning. Learning adds flexibility not only
in games, but in many real-world scenarios, such as automated driving, military tactics, and robot
control.
Sophisticated behaviors are difficult to discover in part because they are likely to be ex-
tremely complex, perhaps requiring the optimization of thousands or even millions of parameters.
Searching through such high-dimensional space is intractable even for the most powerful methods.
This dissertation describes a method for discovering complex neural network-controlled behaviors
by gradually building up to a solution in an evolutionary process called complexification. The high-
dimensional space of the final solution is only encountered at the very end of the search.
This chapters begins by motivating complexification, then briefly describes the approach,
and concludes with an overview of the results and contributions of the dissertation.
1



剩余179页未读,继续阅读

liuxinbjut
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


