YOLOv8网络结构图代码实现解析:深入理解模型构建过程,掌握核心技术
发布时间: 2024-07-20 03:46:42 阅读量: 108 订阅数: 42 
# 1. YOLOv8网络结构概述
YOLOv8作为YOLO系列目标检测算法的最新版本,在准确性和速度方面取得了显著提升。其网络结构主要由Backbone、Neck和Head三个部分组成。
### Backbone网络:CSPDarknet53
Backbone网络负责提取图像特征,YOLOv8采用改进的CSPDarknet53作为Backbone网络。CSPDarknet53在Darknet53的基础上引入了CSP(Cross Stage Partial)结构,通过将特征图分为两部分并交替处理,实现了更快的推理速度和更高的特征提取能力。
### Neck网络:PANet
Neck网络用于融合不同尺度的特征图,YOLOv8采用PANet(Path Aggregation Network)作为Neck网络。PANet通过自底向上的路径和自顶向下的路径,将不同尺度的特征图进行融合,增强了模型的多尺度检测能力。
# 2. YOLOv8模型构建原理
### 2.1 Backbone网络:CSPDarknet53
#### 2.1.1 CSPDarknet53的架构和特点
CSPDarknet53是YOLOv8中使用的Backbone网络,它是一种深度卷积神经网络,具有以下特点:
- **CSP结构:**CSP(Cross Stage Partial)结构将网络分为多个阶段,每个阶段包含多个卷积层。在每个阶段中,一部分特征图直接跳过,而另一部分特征图则通过卷积层处理。这种结构可以减少计算量,同时保持模型的精度。
- **深度可分离卷积:**CSPDarknet53使用了深度可分离卷积,它将卷积操作分解为深度卷积和逐点卷积。这种分解可以减少模型的参数数量,同时保持模型的性能。
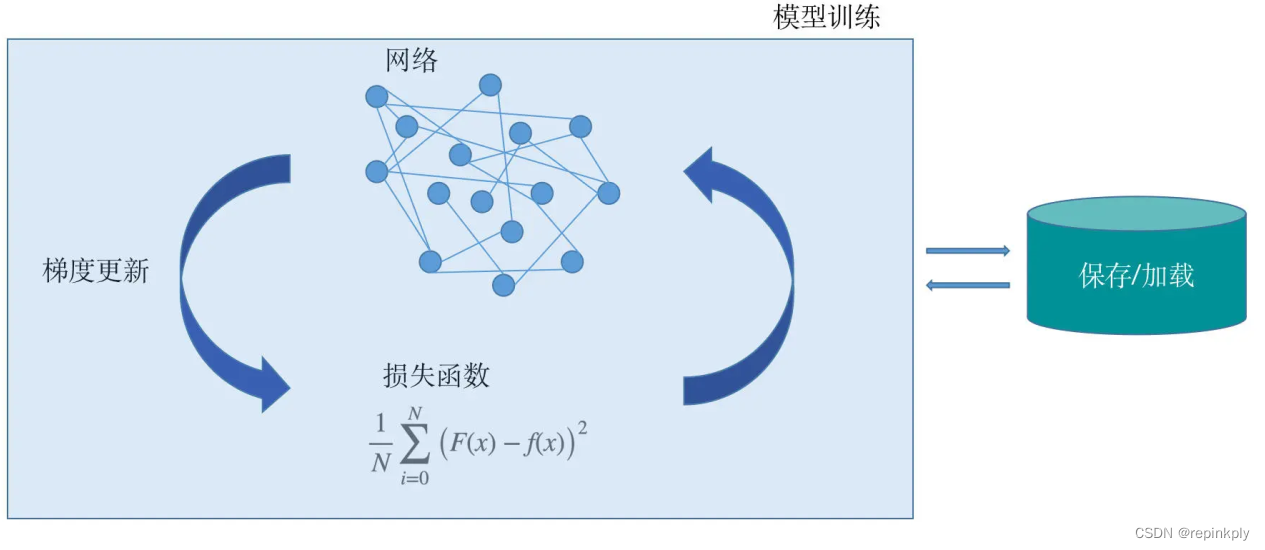
- **残差连接:**CSPDarknet53使用了残差连接,它将每个阶段的输入特征图与输出特征图相加。这种连接可以缓解梯度消失问题,并提高模型的训练稳定性。
#### 2.1.2 CSPDarknet53的实现代码解析
```python
import torch
from torch import nn
class CSPDarknet53(nn.Module):
def __init__(self):
super(CSPDarknet53, self).__init__()
# 定义CSP阶段
self.stage1 = nn.Sequential(
nn.Conv2d(3, 32, 3, 1, 1, bias=False),
nn.BatchNorm2d(32),
nn.LeakyReLU(0.1),
nn.MaxPool2d(2, 2)
)
self.stage2 = nn.Sequential(
nn.Conv2d(32, 64, 3, 1, 1, bias=False),
nn.BatchNorm2d(64),
nn.LeakyReLU(0.1),
nn.Conv2d(64, 64, 1, 1, 0, bias=False),
nn.BatchNorm2d(64),
nn.LeakyReLU(0.1),
)
self.stage3 = nn.Sequential(
nn.Conv2d(64, 128, 3, 2, 1, bias=False),
nn.BatchNorm2d(128),
nn.LeakyReLU(0.1),
nn.Conv2d(128, 128, 1, 1, 0, bias=False),
nn.BatchNorm2d(128),
nn.LeakyReLU(0.1),
)
# ...
def forward(self, x):
# 逐个通过CSP阶段
x = self.stage1(x)
x
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 YOLOv8 网络结构图专栏!本专栏深入剖析了 YOLOv8 的创新架构,揭示了其性能提升的秘诀。从原理到实战,我们将全面解读 YOLOv8 的设计精髓,并探索其与前代模型的演进之路。通过核心模块的分析,您将了解 YOLOv8 性能优化的奥秘。此外,我们还提供了实战应用指南、常见问题解答和性能优化技巧,帮助您充分利用 YOLOv8 的潜力。本专栏还探讨了 YOLOv8 与其他目标检测模型的对比,以及它在不同场景下的应用,拓展其泛化能力。通过分享实战经验和模型压缩技术,我们将助力您高效部署 YOLOv8,赋能边缘设备。最后,我们还将探索 YOLOv8 在自动驾驶、医疗影像等领域的跨领域应用,拓展其价值。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
探索与利用平衡:强化学习在超参数优化中的应用
# 1. 强化学习与超参数优化的交叉领域
## 引言
随着人工智能的快速发展,强化学习作为机器学习的一个重要分支,在处理决策过程中的复杂问题上显示出了巨大的潜力。与此同时,超参数优化在提高机器学习模型性能方面扮演着关键角色。将强化学习应用于超参数优化,不仅可实现自动化,还能够通过智能策略提升优化效率,对当前AI领域的发展产生了深远影响。
## 强化学习与超参数优化的关系
强化学习能够通过与环境的交互来学
机器学习性能评估:时间复杂度在模型训练与预测中的重要性
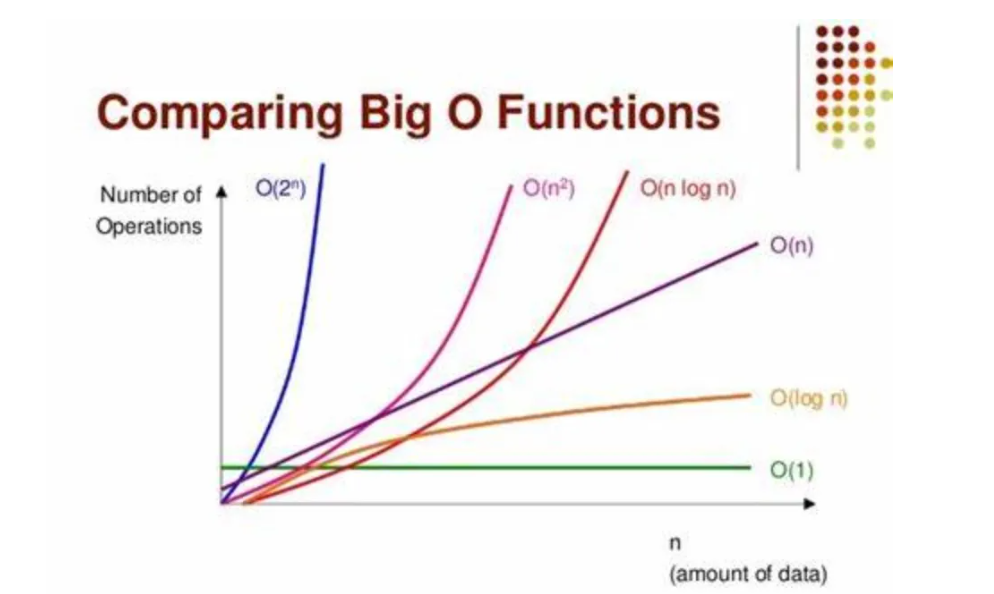
# 1. 机器学习性能评估概述
## 1.1 机器学习的性能评估重要性
机器学习的性能评估是验证模型效果的关键步骤。它不仅帮助我们了解模型在未知数据上的表现,而且对于模型的优化和改进也至关重要。准确的评估可以确保模型的泛化能力,避免过拟合或欠拟合的问题。
## 1.2 性能评估指标的选择
选择正确的性能评估指标对于不同类型的机器学习任务至关重要。例如,在分类任务中常用的指标有
贝叶斯优化:智能搜索技术让超参数调优不再是难题
# 1. 贝叶斯优化简介
贝叶斯优化是一种用于黑盒函数优化的高效方法,近年来在机器学习领域得到广泛应用。不同于传统的网格搜索或随机搜索,贝叶斯优化采用概率模型来预测最优超参数,然后选择最有可能改进模型性能的参数进行测试。这种方法特别适用于优化那些计算成本高、评估函数复杂或不透明的情况。在机器学习中,贝叶斯优化能够有效地辅助模型调优,加快算法收敛速度,提升最终性能。
接下来,我们将深入探讨贝叶斯优化的理论基础,包括它的工作原理以及如何在实际应用中进行操作。我们将首先介绍超参数调优的相关概念,并探讨传统方法的局限性。然后,我们将深入分析贝叶斯优化的数学原理,以及如何在实践中应用这些原理。通过对
时间序列分析的置信度应用:预测未来的秘密武器
# 1. 时间序列分析的理论基础
在数据科学和统计学中,时间序列分析是研究按照时间顺序排列的数据点集合的过程。通过对时间序列数据的分析,我们可以提取出有价值的信息,揭示数据随时间变化的规律,从而为预测未来趋势和做出决策提供依据。
## 时间序列的定义
时间序列(Time Series)是一个按照时间顺序排列的观测值序列。这些观测值通常是一个变量在连续时间点的测量结果,可以是每秒的温度记录,每日的股票价
【目标变量优化】:机器学习中因变量调整的高级技巧
# 1. 目标变量优化概述
在数据科学和机器学习领域,目标变量优化是提升模型预测性能的核心步骤之一。目标变量,又称作因变量,是预测模型中希望预测或解释的变量。通过优化目标变量,可以显著提高模型的精确度和泛化能力,进而对业务决策产生重大影响。
## 目标变量的重要性
目标变量的选择与优化直接关系到模型性能的好坏。正确的目标变量可以帮助模
【Python预测模型构建全记录】:最佳实践与技巧详解
# 1. Python预测模型基础
Python作为一门多功能的编程语言,在数据科学和机器学习领域表现得尤为出色。预测模型是机器学习的核心应用之一,它通过分析历史数据来预测未来的趋势或事件。本章将简要介绍预测模型的概念,并强调Python在这一领域中的作用。
## 1.1 预测模型概念
预测模型是一种统计模型,它利用历史数据来预测未来事件的可能性。这些模型在金融、市场营销、医疗保健和其
极端事件预测:如何构建有效的预测区间
# 1. 极端事件预测概述
极端事件预测是风险管理、城市规划、保险业、金融市场等领域不可或缺的技术。这些事件通常具有突发性和破坏性,例如自然灾害、金融市场崩盘或恐怖袭击等。准确预测这类事件不仅可挽救生命、保护财产,而且对于制定应对策略和减少损失至关重要。因此,研究人员和专业人士持
【实时系统空间效率】:确保即时响应的内存管理技巧

# 1. 实时系统的内存管理概念
在现代的计算技术中,实时系统凭借其对时间敏感性的要求和对确定性的追求,成为了不可或缺的一部分。实时系统在各个领域中发挥着巨大作用,比如航空航天、医疗设备、工业自动化等。实时系统要求事件的处理能够在确定的时间内完成,这就对系统的设计、实现和资源管理提出了独特的挑战,其中最为核心的是内存管理。
内存管理是操作系统的一个基本组成部
模型参数泛化能力:交叉验证与测试集分析实战指南

# 1. 交叉验证与测试集的基础概念
在机器学习和统计学中,交叉验证(Cross-Validation)和测试集(Test Set)是衡量模型性能和泛化能力的关键技术。本章将探讨这两个概念的基本定义及其在数据分析中的重要性。
## 1.1 交叉验证与测试集的定义
交叉验证是一种统计方法,通过将原始数据集划分成若干小的子集,然后将模型在这些子集上进行训练和验证,以
【复杂度理论基础】:一文读懂P vs NP问题与计算复杂性
# 1. 计算复杂性理论概述
在现代计算机科学领域中,计算复杂性理论(Computational Complexity Theory)是研究算法解决问题的难易程度的一个重要分支。它的核心是定义和分类问题的复杂度类别,以及研究这些类别之间可能存在的关系。复杂性理论通过分析算法的效率和资源消耗
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )