PID调节器赋能机器人精准控制:工业机器人中的应用实践
发布时间: 2024-07-09 10:18:04 阅读量: 81 订阅数: 46 
# 1. PID调节器原理与理论**
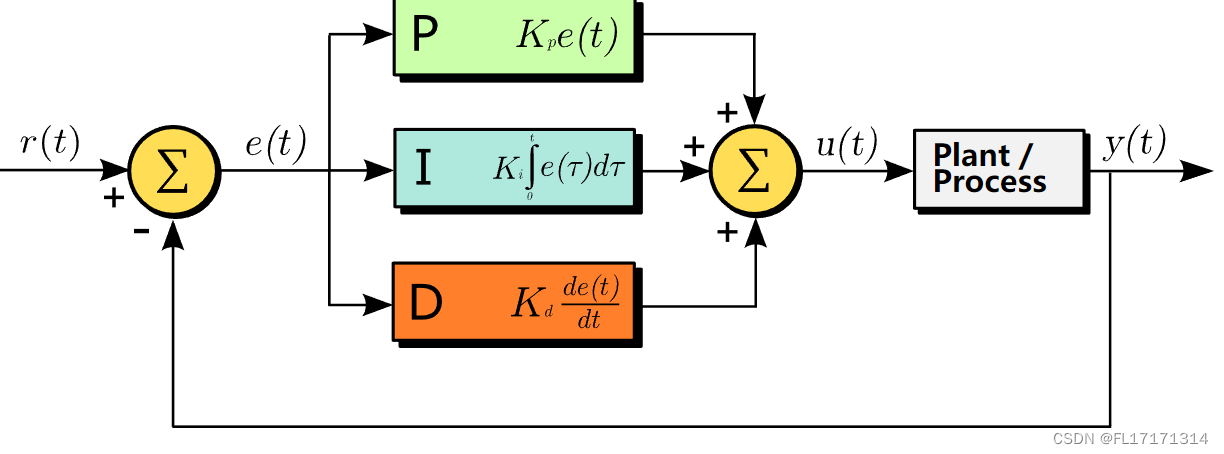
PID调节器(比例-积分-微分调节器)是一种广泛应用于工业机器人控制的反馈控制算法。它通过测量系统的输出与期望值之间的误差,并根据误差的比例、积分和微分值来调整控制信号,从而使系统输出接近期望值。
PID调节器的基本原理如下:
* **比例控制:**根据误差的比例大小调整控制信号,以快速响应误差。
* **积分控制:**根据误差的积分值调整控制信号,以消除稳态误差。
* **微分控制:**根据误差的微分值调整控制信号,以预测误差的变化趋势,提高系统的响应速度。
PID调节器的参数包括比例系数(Kp)、积分时间(Ti)和微分时间(Td),这些参数需要根据系统的特性进行调整,以获得最佳的控制效果。
# 2. PID调节器在工业机器人中的应用
PID调节器在工业机器人中的应用十分广泛,主要应用于机器人关节控制和末端执行器控制两个方面。
### 2.1 PID调节器在机器人关节控制中的应用
机器人关节控制是机器人运动控制的基础,主要包括位置控制、速度控制和力矩控制。
**2.1.1 位置控制**
位置控制是指控制机器人关节运动到指定位置。PID调节器通过测量关节当前位置与目标位置之间的误差,并根据误差大小和变化率调整关节的驱动扭矩,从而使关节运动到目标位置。
```python
def position_control(target_position, current_position, kp, ki, kd):
"""
位置控制算法
参数:
target_position: 目标位置
current_position: 当前位置
kp: 比例增益
ki: 积分增益
kd: 微分增益
"""
# 计算误差
error = target_position - current_position
# 计算比例项
p_term = kp * error
# 计算积分项
i_term = ki * error * dt
# 计算微分项
d_term = kd * (error - previous_error) / dt
# 计算控制量
control_signal = p_term + i_term + d_term
# 更新上一次误差
previous_error = error
return control_signal
```
**2.1.2 速度控制**
速度控制是指控制机器人关节运动到指定速度。PID调节器通过测量关节当前速度与目标速度之间的误差,并根据误差大小和变化率调整关节的驱动扭矩,从而使关节运动到目标速度。
```python
def velocity_control(target_velocity, current_velocity, kp, ki, kd):
"""
速度控制算法
参数:
target_velocity: 目标速度
current_velocity: 当前速度
kp: 比例增益
ki: 积分增益
kd: 微分增益
"""
# 计算误差
error = target_velocity - current_velocity
# 计算比例项
p_term = kp * error
# 计算积分项
i_term = ki * error * dt
# 计算微分项
d_term = kd * (error - previous_error) / dt
# 计算控制量
control_signal = p_term + i_term + d_term
# 更新上一次误差
previous_error = error
return control_signal
```
**2.1.3 力矩控制**
力矩控制是指控制机器人关节输出的力矩。PID调节器通过测量关节当前力矩与目标力矩之间的误差,并根据误差大小和变化率调整关节的驱动电流,从而使关节输出目标力矩。
```python
def torque_control(target_torque, current_torque, kp, ki, kd):
"""
力矩控制算法
参数:
target_torque: 目标力矩
current_torque: 当前力矩
kp: 比例增益
ki: 积分增益
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《PID 调节器实战指南》专栏深入探讨了 PID 调节器的原理、应用和优化策略。从参数调优秘诀到稳定性提升策略,再到抗干扰性提升秘籍,专栏提供了全面的指南,帮助读者掌握 PID 控制。此外,专栏还展示了 PID 调节器在工业自动化、过程控制、机器人控制、电网稳定、飞行器运行、环境控制、汽车控制、智能家居、工业机器人、伺服系统、温度控制、压力控制、液位控制和速度控制等领域的广泛应用。通过深入剖析实际案例,专栏提供了宝贵的见解和实践指南,帮助读者在各种应用场景中有效利用 PID 调节器,提升控制性能,保障系统稳定,优化工艺流程,并实现智能控制。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JT-808协议调试指南:一文搞定终端设备常见问题

参考资源链接:[SpaceClaim导入导出支持的文件类型与操作](https://wenku.csdn.net/doc/1yxj2iqphb?spm=1055.2635.3001.10343)
# 1. JT-808协议概述及关键特性
## 1.1 协议背景与发展
JT-808协议,全称为《车辆终端通信
【系统管理必修课】:ATEQ F610_F620_F670系统备份与恢复指南

参考资源链接:[FANUC机器人TCP/IP通信设置手册](https://wenku.csdn.net/doc/6401acf8cce7214c316edd05?spm=1055.2635.3001.10343)
# 1. FANUC机器人与数据库集成概述
## 1.1 集成背景与需求分析
在现代制造业中,机器人与数据库的集成变得越来越重要。FANUC机器人作为工业自动化领域的领头羊,其与数据库的高效集成能够帮助企业实现数据驱动的智能化生
【Star CCM+仿真数据管理策略】:组织与检索项目数据,提升数据处理效率
参考资源链接:[STAR-CCM+用户指南:版本13.02官方文档](https://wenku.csdn.net/doc/2x631xmp84?spm=1055.2635.3001.10343)
# 1. Star CCM+仿真数据管理概
VW80808-1高并发处理指南:优化系统应对大量请求的高级技巧(并发处理)
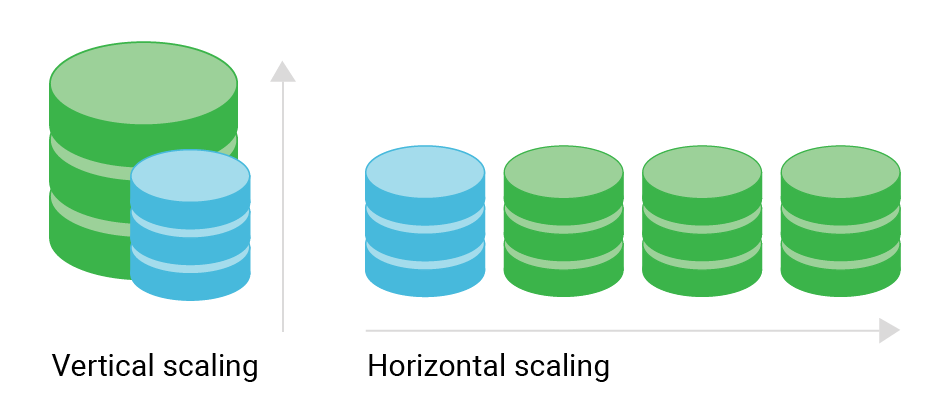
参考资源链接:[VW80808-1中文版:2020电子组件标准规范](https://wenku.csdn.net/doc/3obrzxnu87?spm=1055.2635.3001.10343)
# 1. 高并发处理概述
在互联网技术迅猛发展的今天,高并发处理已经成为衡量一个系统性能的重要指标。高并发处理指的是在极短的时间内处理数以万计甚至更多的并发请
【自动编译问题排查】:IDEA编译错误,快速诊断与解决
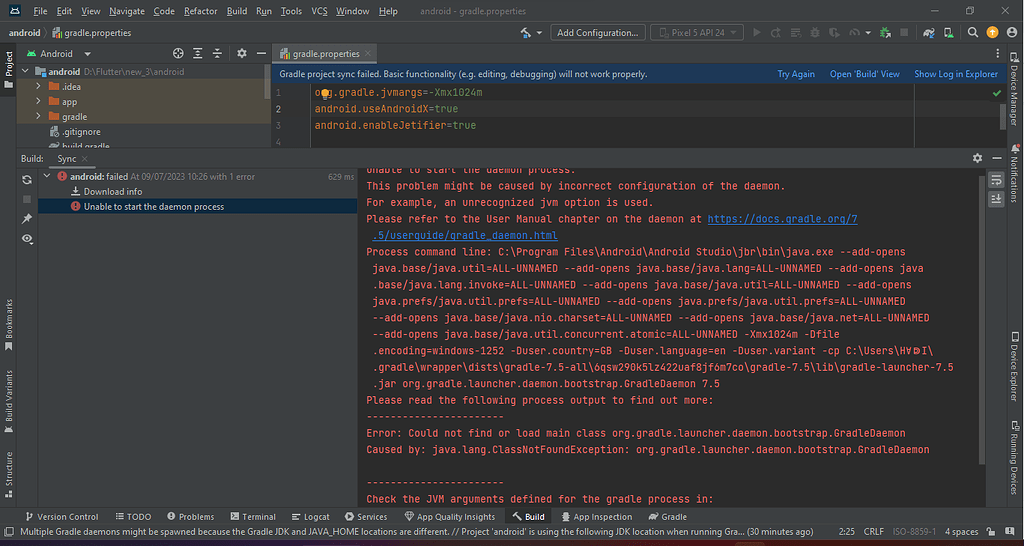
参考资源链接:[IDEA 开启自动编译设置步骤](https://wenku.csdn.net/doc/646ec8d7d12cbe7ec3f0b643?spm=1055.2635.3001.10343)
# 1. 理解IDEA中的自动编译机制
在使用现代集成开发环境(IDE)如IntelliJ IDEA进行
【ST7796S色彩校准】:精确调校显示色彩的5个步骤

参考资源链接:[ST7796S参考手册](https://wenku.csdn.net/doc/6412b74ebe7fbd1778d49d33?spm=1055.2635.3001.10343)
# 1. ST7796S显示技术简介
ST7796S作为一款广泛应用于小尺寸显示屏的驱动IC,它以其高效能与高性能在显示技术领域占有一席之地。本章节将简要介绍ST
ALINT-PRO进阶技巧:设计质量飞跃的秘诀

参考资源链接:[ALINT-PRO中文教程:从入门到精通与规则详解](https://wenku.csdn.net/doc/646727e05928463033d773
LabView SDK调用海康摄像头:深入了解接口协议,提升你的实战能力!

参考资源链接:[LabView调用海康摄像头SDK实现监控与功能](https://wenku.csdn.net/doc/4jie0j0s20?spm=1055.2635.3001.10343)
# 1. 海康摄像头与LabView SDK简介
在现代监控系统中,海康摄像头凭借其高质量的视频捕获和处理能力,在业界备受推崇。与此同时,LabView作为一个功能强大的图形化编
航空航天领域的比例谐振控制前沿研究:探索未来技术

参考资源链接:[比例谐振PR控制器详解:从理论到实践](https://wenku.csdn.net/doc/5ijacv41jb?spm=1055.2635.3001.10343)
# 1. 比例谐振控制在航空航天领域的概述
## 1.1 航空航天控制需求的特殊性
在航空航天领域,控制系统的精确性和可靠性是至关重要的。由于航空航天环境的严酷
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )