PID调节器稳定液位:液位控制中的应用实践
发布时间: 2024-07-09 10:36:43 阅读量: 98 订阅数: 57 

PLC的PID液位控制
# 1. PID调节器简介及原理
PID调节器(Proportional-Integral-Derivative Controller)是一种广泛应用于工业控制领域的反馈控制算法。它通过测量被控对象的输出值,计算出与期望值之间的误差,并根据误差的比例、积分和微分值来调整控制器的输出,从而达到控制目标。
PID调节器的基本原理如下:
* **比例项(P)**:与误差成正比,用于快速响应误差变化。
* **积分项(I)**:与误差的积分值成正比,用于消除稳态误差。
* **微分项(D)**:与误差变化率成正比,用于预测误差变化趋势,提高控制系统的稳定性。
# 2. PID调节器在液位控制中的应用
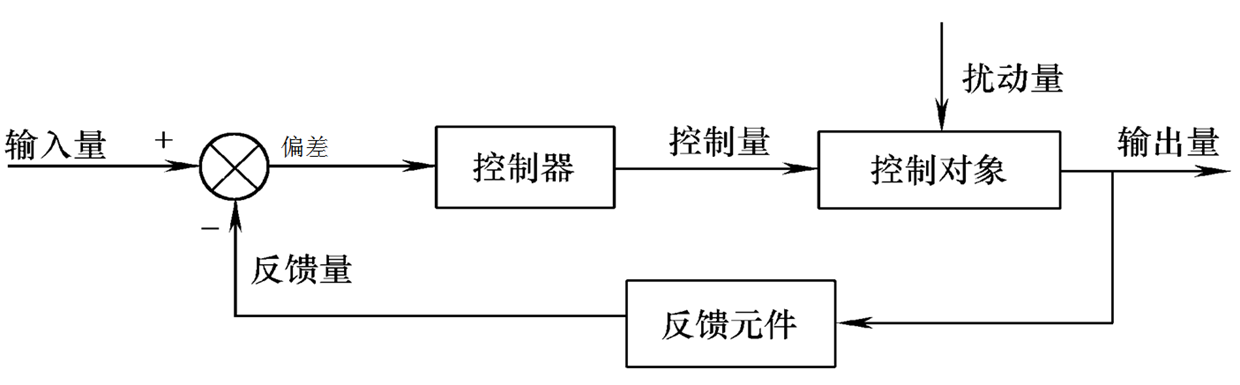
### 2.1 液位控制系统的组成和原理
液位控制系统是一种自动控制系统,用于控制容器或管道中的液位。其主要组成部分包括:
- **液位传感器:**测量容器或管道中液位的传感器,如浮子式液位传感器、电容式液位传感器等。
- **控制器:**接收液位传感器信号,并根据PID调节算法计算控制输出的装置,如PLC、单片机等。
- **执行器:**接收控制器输出信号,并执行控制动作的装置,如电磁阀、调节阀等。
液位控制系统的基本原理是:
1. 液位传感器检测容器或管道中的液位,并将信号发送给控制器。
2. 控制器根据PID调节算法计算控制输出,并发送给执行器。
3. 执行器执行控制动作,如打开或关闭阀门,以调节液体的流入或流出,从而控制液位。
### 2.2 PID调节器的参数整定方法
PID调节器是液位控制系统中常用的控制器,其参数整定方法有以下几种:
- **经验法:**根据经验和工程实践,选择合适的PID参数。
- **齐格勒-尼科尔斯法:**通过阶跃响应法或频率响应法,确定PID参数。
- **模型法:**建立液位控制系统的数学模型,并通过模型参数识别技术,确定PID参数。
### 2.3 PID调节器在液位控制中的仿真与实验
为了验证PID调节器在液位控制中的性能,可以进行仿真和实验。
**仿真:**
使用MATLAB、Simulink等仿真软件,建立液位控制系统的仿真模型。通过仿真,可以分析PID参数对系统性能的影响,并优化PID参数。
**实验:**
搭建实际的液位控制系统,并使用PID调节器进行控制。通过实验,可以验证PID调节器的控制效果,并进一步优化PID参数。
```python
# 液位控制系统仿真代码
import numpy as np
import matplotlib.pyplot as plt
# 系统参数
Kp = 1.0 # 比例增益
Ki = 0.1 # 积分增益
Kd = 0.01 # 微分增益
T = 0.1 # 采样时间
# 液位传感器模拟
liquid_level = 0.0 # 初始液位
# 控制器模拟
error = 0.0 # 误差
integral = 0.0 # 积分
derivative = 0.0 # 微分
# 仿真时间
t = np.arange(0, 100, T)
# 仿真过程
for i in range(len(t)):
# 计算误差
error = setpoint - liquid_level
# 计算积分
integral += error * T
# 计算微分
derivative = (error - prev_error) / T
# 计算控制输出
output = Kp * error + Ki * integral + Kd * derivative
# 执行控制动作
liquid_level += output * T
# 更新前一次误差
prev_error = error
# 绘制液位曲线
plt.plot(t, liquid_level)
plt.xlabel('Time (s)')
plt.ylabel('Liquid Level (m)')
plt.show()
```
**实验:**
```python
# 液位控制系统实验代码
import RPi.GPIO as GPIO
import time
# GPIO引脚定义
liquid_level_sensor_pin = 17 # 液位传感器引脚
valve_pin = 18 # 阀门引脚
# 初始化GPIO
GPIO.setmode(GPIO.BCM)
GPIO.setup(liquid_level_sensor_pin, GPIO.IN)
GPIO.setup(valve_pin, GPIO.OUT)
# PID参数
Kp = 1.0 # 比例增益
Ki = 0.1 # 积分增益
Kd = 0.01
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《PID 调节器实战指南》专栏深入探讨了 PID 调节器的原理、应用和优化策略。从参数调优秘诀到稳定性提升策略,再到抗干扰性提升秘籍,专栏提供了全面的指南,帮助读者掌握 PID 控制。此外,专栏还展示了 PID 调节器在工业自动化、过程控制、机器人控制、电网稳定、飞行器运行、环境控制、汽车控制、智能家居、工业机器人、伺服系统、温度控制、压力控制、液位控制和速度控制等领域的广泛应用。通过深入剖析实际案例,专栏提供了宝贵的见解和实践指南,帮助读者在各种应用场景中有效利用 PID 调节器,提升控制性能,保障系统稳定,优化工艺流程,并实现智能控制。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【儒略日的演化】:探索其历史渊源及在现代的10种应用

# 摘要
儒略日是一种用于记录时间的天文系统,具有悠久的历史背景和数学定义。本文首先介绍了儒略日的定义及其历史沿革,随后详细探讨了儒略日的转换原理与计算方法,包括基本原理、不同年代的计算方法以及与儒略周期的关系。接着,文章分析了儒略日在天文学、历史学以及计算机科学中的具体应用,重点阐述了星历表编纂、天体观测、历史校准和时间数据处理等方面的作用。最后,通过现代技术产品和日常生
Landsat8数据处理秘籍:从入门到精通的10个实用技巧

# 摘要
Landsat 8数据因其高分辨率和广泛覆盖范围在地学研究和环境监测中具有重要应用。本文对Landsat 8数据处理的全过程进行了系统性概述,从基础操作到高级分析,涵盖了数据获取、导入、基础图像处理、裁剪、重投影、辐射定标、大气校正、分类、变化检测技术等关键步骤。进一步
【揭秘FastICA算法】:15分钟精通独立成分分析(ICA)在数据降维中的秘密

# 摘要
独立成分分析(ICA)是一种统计技术,用于从多个信号中分离出统计独立的源信号。本文首先概述了ICA的基本概念和其算法理论基础,深入探讨了ICA的数学模型构建,独立性假设,以及ICA与主成分分析(PCA)的区别。随后,文章详细解析了FastICA算法的步骤、数学推导、代码实现,并对其优化目标与求解方法进行了分析。在数
【Python图像处理大揭秘】:10个技巧助你高效检测空图像
# 摘要
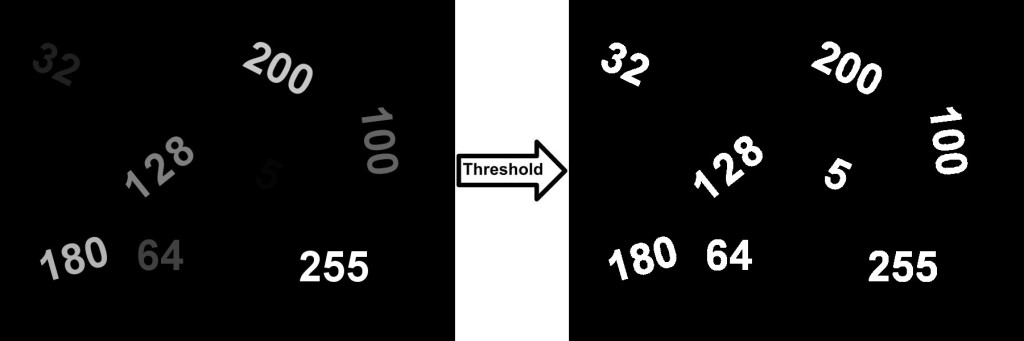
本文系统地介绍了Python在图像处理领域的基础知识和高级技术。首先阐述了图像处理的基础知识,包括基本操作、色彩空间转换以及阈值处理和边缘检测算法。接着,针对空图像检测,探讨了其定义、分类、检测标准和自动化检测流程的构建。文章进一步探讨了利用机器学习和深度学习技术进行图像识别与分类,并关注了实时图像处理反馈机制的实现。最后,通过案例研究
PFC2D_VERSION_3.1用户反馈深度解析:如何持续改进与优化
# 摘要
本文对PFC2D_VERSION_3.1软件的用户反馈进行了全面的分析和总结。文章首先概述了用户反馈的收集方法和分类技术,然后深入探讨了常见问题的分析,包括错误报告、用户体验及功能需求。接着,文章讨论了将用户反馈转化为产品改进的流程,包括改进计划的制定、实施和优化。最后,本文探讨了用户反馈驱动的产
【MXM3.0信号完整性优化秘籍】:PCB布局与布线技巧,提升信号质量
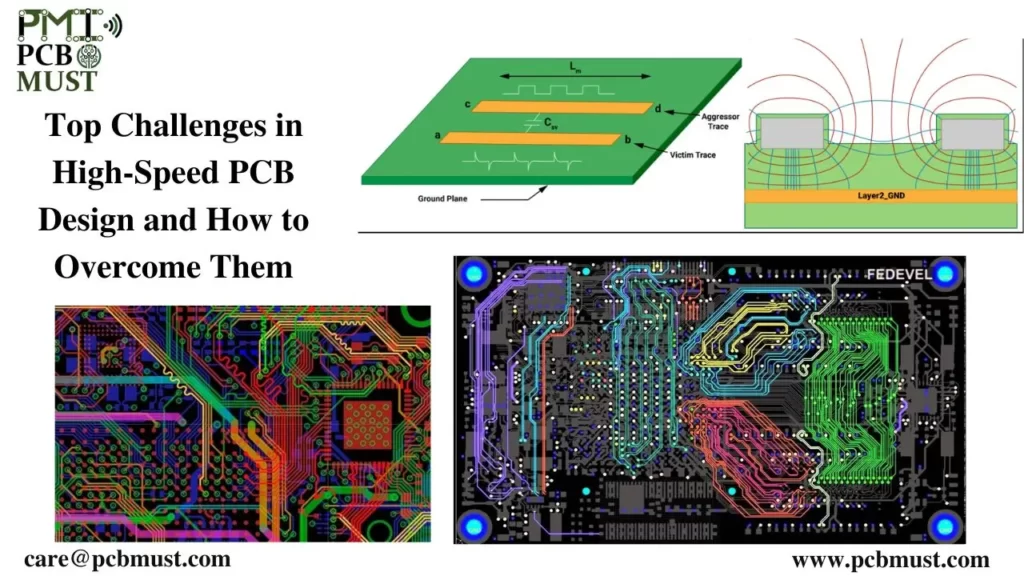
# 摘要
信号完整性是电子工程领域内确保高速电路板(PCB)设计质量和性能的关键因素。本文深入探讨了信号完整性基础知识、PCB布局技巧、布线高级技巧、以及仿真和测试方法,旨在提升设计工程师在实际应用中的布局与布线技能。通过对信号完整性在PCB布局中的角色、高速信号布线策略、去耦合与阻抗控制、差分信号布线、串扰与反射
SetGO实战演练:打造ABB机器人的动作序列
# 摘要
本文旨在介绍SetGO编程环境的基础入门和高级应用技巧,重点是ABB机器人的动作和控制。通过深入探讨ABB机器人的基本动作指令、控制结构、任务序列编程,以及SetGO在传感器集成、视觉系统集成和复杂动作中的应用,本文提供了实际项目案例分析,展示如何实现自动化装配线、物料搬运与排序以及质量检测与包装的自动化。同时,本文还探讨
数字电路设计者的必备:异或门与非门转换的权威指南
# 摘要
异或门与非门是数字电路设计中的基础逻辑元件,对于构建复杂的数字系统至关重要。本文首先介绍了异或门与非门的基本概念和基础理论,然后深入探讨了它们的工作原理和在数字电路中的应用。接着,本文着重讲解了异或门与非门之间的转换技巧,包括使用逻辑表达式转换方法和仿真工具。此外,本文通过实验实践展示了这些转换技巧的应用,并对现代电子设计及未来技术中异或门与非门的潜在应用进行了展望。最后
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )