PID调节器助力飞行器平稳运行:航空航天领域的应用解析
发布时间: 2024-07-09 10:01:32 阅读量: 86 订阅数: 47 
# 1. PID调节器的基本原理**
PID(比例-积分-微分)调节器是一种广泛应用于控制系统的反馈控制器。其基本原理是通过测量系统输出与期望输出之间的误差,并根据误差的比例、积分和微分值来调整控制输出,从而使系统输出接近期望输出。
**PID调节器的结构**
PID调节器的结构如下图所示:
```mermaid
graph LR
subgraph PID控制器
A[比例] --> B[积分]
B --> C[微分]
C --> D[输出]
end
```
**PID调节器的参数**
PID调节器有三个参数:比例系数(Kp)、积分时间(Ti)和微分时间(Td)。这些参数决定了调节器的响应速度和稳定性。
* **比例系数(Kp):**控制输出与误差成正比。Kp越大,调节器响应越快,但稳定性越差。
* **积分时间(Ti):**控制输出与误差的积分成正比。Ti越大,调节器消除稳态误差的能力越强,但响应速度越慢。
* **微分时间(Td):**控制输出与误差的微分成正比。Td越大,调节器对误差变化的响应越灵敏,但稳定性越差。
# 2. PID调节器在航空航天领域的应用
### 2.1 飞行器姿态控制
#### 2.1.1 俯仰角控制
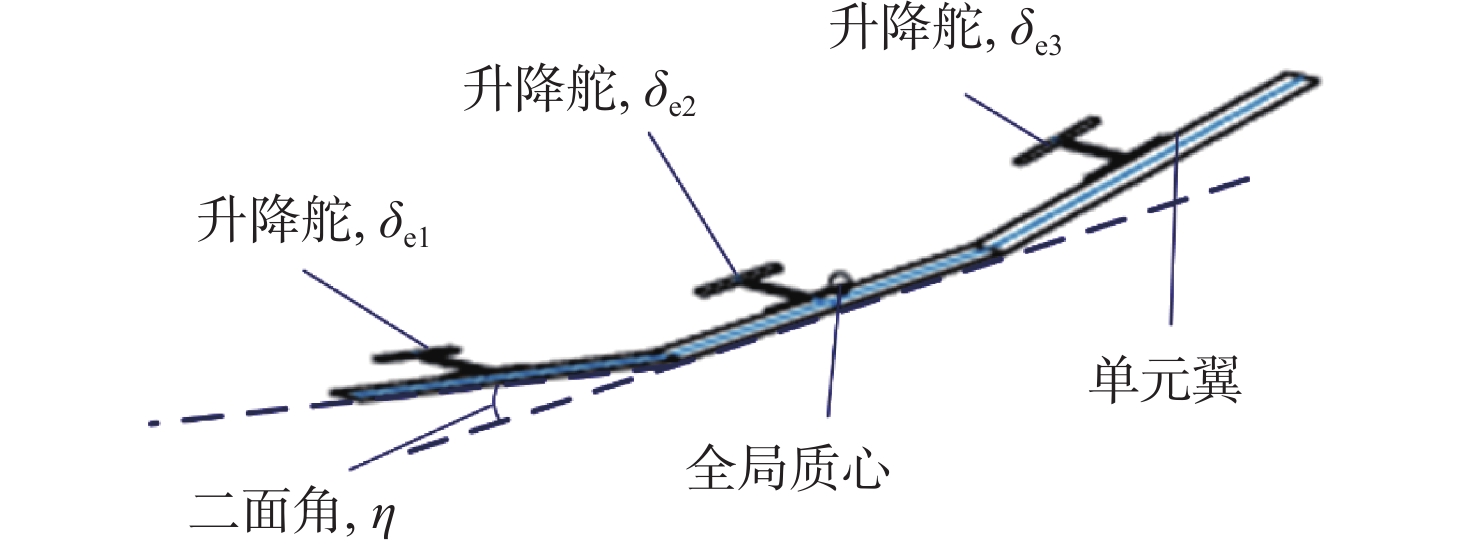
PID调节器在飞行器俯仰角控制中发挥着至关重要的作用。俯仰角是指飞行器相对于水平面的纵向倾斜角,其控制对于维持飞行器的稳定性和机动性至关重要。
**PID控制原理:**
PID调节器通过测量俯仰角偏差(实际俯仰角与期望俯仰角之间的差值),并根据偏差的大小和变化率,计算出控制输出(升降舵偏角)。控制输出作用于飞行器,从而调整俯仰角,使其接近期望值。
**参数整定:**
PID调节器的参数(比例增益、积分时间、微分时间)需要根据飞行器特性和控制要求进行整定。常用的参数整定方法包括:
- **Ziegler-Nichols方法:**基于阶跃响应,快速估算PID参数。
- **试错法:**通过反复调整参数,优化控制性能。
- **优化算法:**使用遗传算法或粒子群优化算法,自动搜索最优参数。
**代码示例:**
```python
import control
# 飞行器俯仰角控制系统模型
plant = control.TransferFunction([1], [1, 2, 1])
# PID控制器参数
Kp = 1.2
Ki = 0.5
Kd = 0.1
# PID控制器
controller = control.PID(Kp, Ki, Kd)
# 闭环系统
closed_loop = control.feedback(controller, plant)
# 仿真
t = np.linspace(0, 10, 100)
y, t = control.step_response(closed_loop, t)
# 绘制俯仰角响应
plt.plot(t, y)
plt.xlabel('Time (s)')
plt.ylabel('Pitch Angle (rad)')
plt.show()
```
**逻辑分析:**
- `plant`变量表示飞行器俯仰角控制系统的传递函数模型。
- `Kp`、`Ki`、`Kd`变量分别表示PID调节器的比例增益、积分时间、微分时间。
- `controller`变量创建了PID控制器对象。
- `closed_loop`变量表示PID控制器与飞行器模型的闭环系统。
- `step_response`函数对闭环系统进行阶跃响应仿真,返回系统输出`y`和时间`t`。
- `plt.plot`函数绘制了俯仰角响应曲线。
### 2.1.2 滚转角控制
滚转角是指飞行器相对于水平面的横向倾斜角,其控制对于维持飞行器的稳定性和机动性至关重要。
**PID控制原理:**
PID调节器在飞行器滚转角控制中也扮演着重要角色。其原理与俯仰角控制类似,通过测量滚转角偏差,计算出控制输出(副翼偏角),作用于飞行器,调整滚转角。
**参数整定:**
滚转角控制的PID参数整定方法与俯仰角控制类似,包括Ziegler-Nichols方法、试错法和优化算法。
**代码示例:**
```python
# 飞行器滚转角控制系统模型
pl
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《PID 调节器实战指南》专栏深入探讨了 PID 调节器的原理、应用和优化策略。从参数调优秘诀到稳定性提升策略,再到抗干扰性提升秘籍,专栏提供了全面的指南,帮助读者掌握 PID 控制。此外,专栏还展示了 PID 调节器在工业自动化、过程控制、机器人控制、电网稳定、飞行器运行、环境控制、汽车控制、智能家居、工业机器人、伺服系统、温度控制、压力控制、液位控制和速度控制等领域的广泛应用。通过深入剖析实际案例,专栏提供了宝贵的见解和实践指南,帮助读者在各种应用场景中有效利用 PID 调节器,提升控制性能,保障系统稳定,优化工艺流程,并实现智能控制。
专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【物联网解决方案】:LAN9252芯片在智能连接中的关键作用及配置技巧

参考资源链接:[MicroChip LAN9252:集成EtherCAT控制器的手册概述](https://wenku.csdn.net/doc/6412b46fbe7fbd1778d3f958?spm=1055.2635.30
AMS1117与其他稳压器比较:精挑细选的决策指南
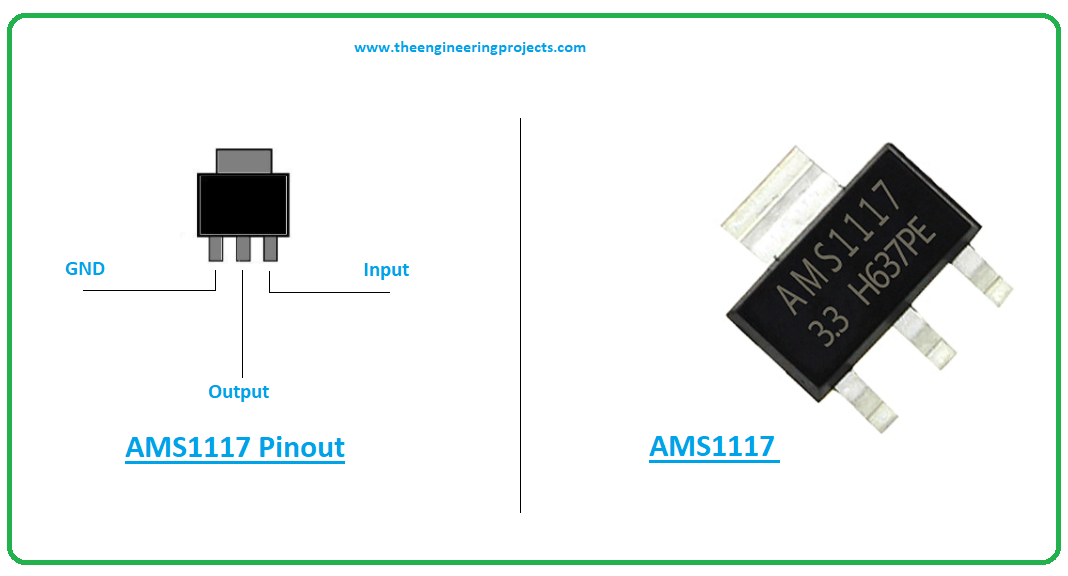
参考资源链接:[AMS1117稳压芯片的芯片手册](https://wenku.csdn.net/doc/646eba3fd12cbe7ec3f097d2?spm=1055.2635.3001.10343)
# 1. 稳压器基础知识回顾
## 1.1 稳压器工作原理
稳压器是一种电子设备,其作用是将不稳定的电压调整为稳定的输出电压。它们通常通
【汇川机器人编程进阶】:掌握高级编程技巧的6大策略
参考资源链接:[汇川机器人系统编程指令详解](https://wenku.csdn.net/doc/1qr1cycd43?spm=1055.2635.3001.10343)
# 1. 汇川机器人编程概述
## 1.1 汇川技术与机器人编程的融合
汇川技术作为工业自动化领域的佼佼者,其在机器人编程领域的应用日益增长。机器人编程不仅仅局限于传统的编码任务,还涉及到了控制逻辑、通信协议以及与工业设备的协调一
【S7-1200 CAN通信调试秘籍】:故障定位与性能分析指南

参考资源链接:[西门子S7-1200 CAN总线通信教程:从组态到编程详解](https://wenku.csdn.net/doc/5f5h0svh9g?spm=1055.2635.3001.10343)
# 1. S7-1200 PLC和CAN通信基础
## 1.1 PLC与CAN通信简介
可编程逻辑控制器(PLC)在工业自动化领域扮演着核心角色,S7-1200 PLC是西门子生产的一款适用于小型自
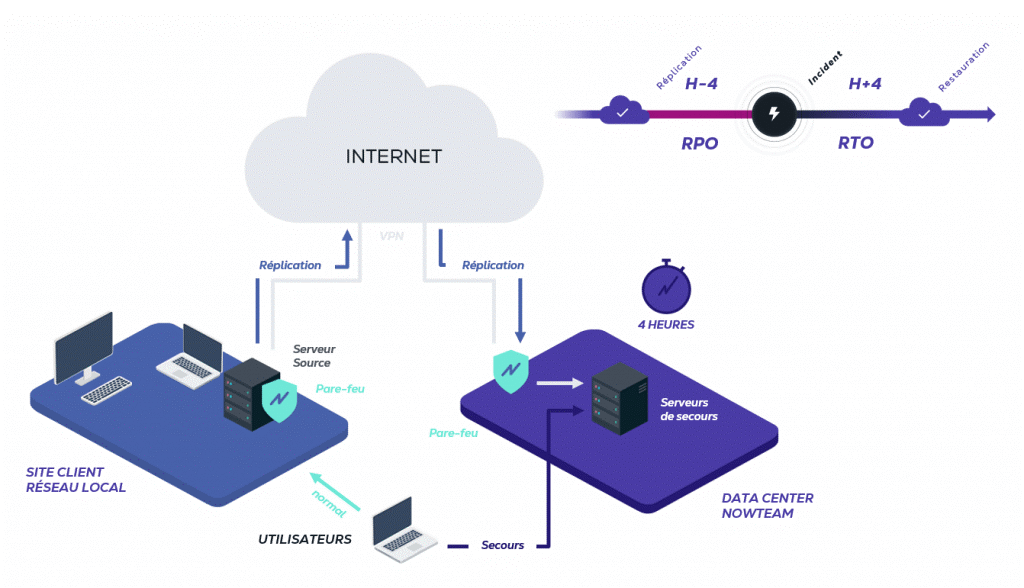
VT System高可用性部署:构建无中断业务连续性的终极攻略
参考资源链接:[VT System中文使用指南全面解析与常见问题](https://wenku.csdn.net/doc/3xg8i4jone?spm=1055.2635.3001.10343)
# 1. VT System高可用性架构概述
在信息技术飞速发展的今天,系统停机时间的代价变得越来越昂贵。因此,高可用性(High Availability,简称HA)成为了衡量关键系统稳定性
【性能调优实战】:从输出类型出发优化MySQL Workbench性能

参考资源链接:[ANSYS Workbench后处理:结果查看技巧与云图、切片详解](https://wenku.csdn.net/doc/6412b69abe7fbd1778d474ed?spm=1055.2635.3001.10343)
# 1. MySQL Workbench性能问题概述
在当今数字化转型不断深化的背景下,数据库的性能直接关系到企业应用系统的响应速度和用户体验。MySQL Workbench 作为一
【GEE数据融合艺术】
参考资源链接:[Google Earth Engine中文教程:遥感大数据平台入门指南](https://wenku.csdn.net/doc/499nrqzhof?spm=1055.2635.3001.10343)
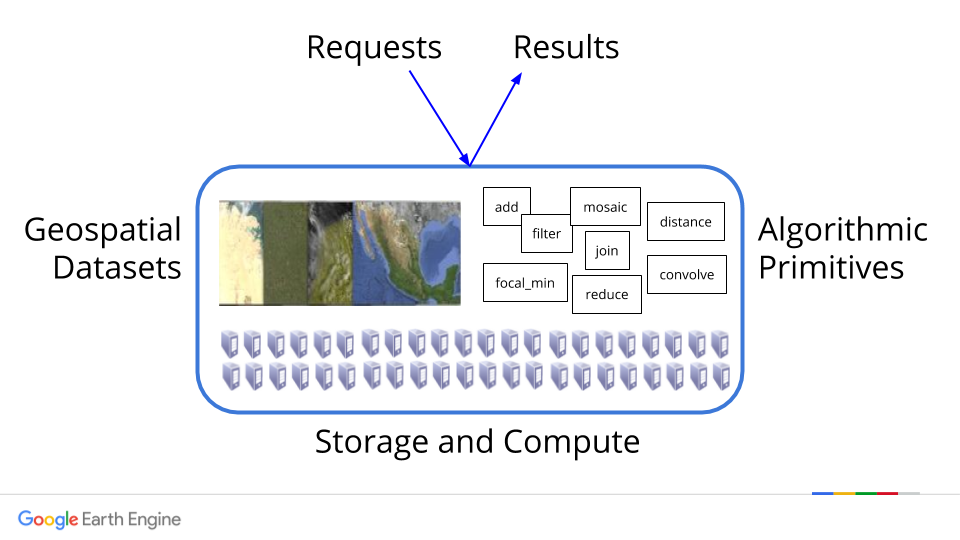
# 1. GEE数据融合的基础概念
## 1.1 GEE简介
Google Earth Engine(GEE)是一个云计算平台,提供对海量卫星影像和地理信
【DHCP服务指南】:迈普交换机命令行配置与故障排除的4个关键点
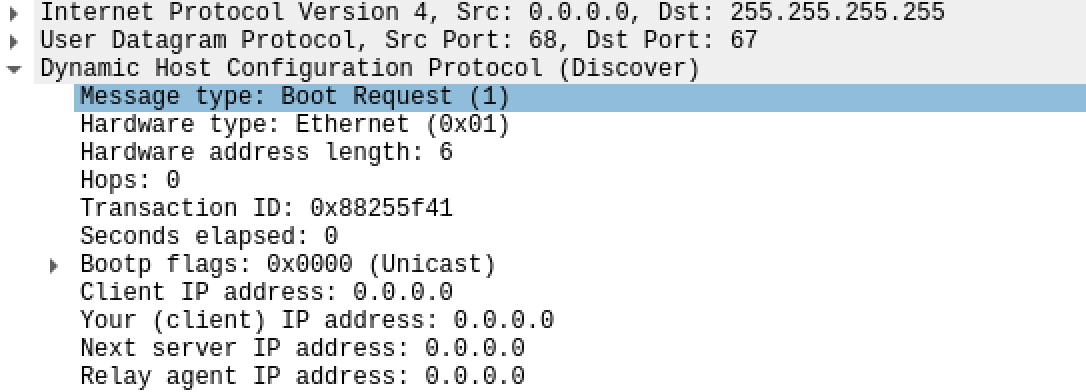
参考资源链接:[迈普交换机命令指南:模式切换与维护操作](https://wenku.csdn.net/doc/6412b79abe7fbd1778d4ae1b?spm=1055.2635.3
MATLAB Simulink模块测试策略:确保模块可靠性的7个关键方法

参考资源链接:[Matlab Simulink电力线路模块详解:参数、应用与模型](https://wenku.c
【TI杯赛题缓存机制大揭秘】:提升算法效率的关键

参考资源链接:[2020年TI杯模拟专题邀请赛赛题-A题单次周期信号再现装置](https://wenku.csdn.net/doc/6459dc3efcc539136824a4c0?spm=1055.2635.3001.10343)
# 1. 缓存机制的基本概念
缓存机制是计算机系统中用来提高数据访问效率的一种技术。在数据处理和信息传递过程中,缓存被用来暂存频繁使用或最近使用过的数据,以减
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送1年
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )