Python算法与数据结构:动态规划实战应用
发布时间: 2024-09-11 15:17:18 阅读量: 84 订阅数: 63 

Python数据结构与经典算法讲解:深入解析与实战指南
# 1. 动态规划基础
## 1.1 动态规划概述
动态规划是一种通过把原问题分解为相对简单的子问题的方式来求解复杂问题的方法。它适用于具有重叠子问题和最优子结构特性的问题,通过将子问题的解缓存起来,避免重复计算,从而提高算法效率。动态规划不仅是一种算法思想,也是解决优化问题的强有力工具,在资源分配、路径规划、决策优化等多个领域都有广泛应用。
## 1.2 动态规划解决问题的思路
解决动态规划问题通常遵循以下步骤:首先,分析问题的最优子结构特性,确认能否用动态规划解决;其次,确定状态及其转移方程;然后,设定初始条件和边界条件,为递推关系的迭代计算做准备;最后,通过自底向上或自顶向下的方式实现状态的动态计算,得到问题的最优解。
## 1.3 动态规划与递归的关系
动态规划与递归有着密切的联系。递归方法通过函数调用自身来解决问题,但可能会因为重复计算相同的子问题而导致效率低下。而动态规划通过引入一个存储结构(通常是数组)来保存已经计算过的子问题的结果,避免了重复计算,这是动态规划相对于纯递归方法的一个重要优化。递归方法通常可以作为实现动态规划的手段之一,特别是在自顶向下的实现中。
# 2. 动态规划理论精讲
### 2.1 动态规划的概念和原理
#### 2.1.1 什么是动态规划
动态规划是一种算法思想,它将一个复杂问题分解成更小的子问题,并存储这些子问题的解,以避免重复计算。这种方法特别适用于具有重叠子问题和最优子结构特性的问题。动态规划通常是解决优化问题,即在一系列决策中寻找最优解。
#### 2.1.2 动态规划的特征和优势
动态规划具有以下特征:
- 重叠子问题(Overlapping Subproblems):通过递归地解决问题,相同的子问题会被多次计算。
- 最优子结构(Optimal Substructure):一个问题的最优解包含了其子问题的最优解。
动态规划的优势在于:
- 减少计算时间:通过存储已解决的子问题,动态规划避免了重复计算。
- 易于理解和实现:相比于其他优化算法,动态规划的逻辑通常更容易理解和编程实现。
### 2.2 动态规划的数学基础
#### 2.2.1 递推关系与数学模型
动态规划问题通常可以通过递推关系来表达,即当前状态的解可以由前一个或几个状态的解推导出来。递推关系通常表示为一个数学模型,形式如下:
`dp[i] = f(dp[i-1], dp[i-2], ..., dp[i-k])`
这里 `dp[i]` 表示状态i的解,`f` 是某种函数操作,而 `k` 是依赖的状态数目。
#### 2.2.2 状态转移方程的构建
构建状态转移方程是动态规划中最为关键的步骤。它描述了状态之间的转换关系,通常方程的形式为:
`dp[i][j] = Opt(dp[i-1][j], dp[i][j-1], ..., dp[i'][j'])`
其中,`Opt` 表示某种操作,比如求最大值、最小值、和等,`dp[i][j]` 是在满足特定条件下的最优解。
### 2.3 动态规划的解题步骤
#### 2.3.1 定义状态
定义状态是动态规划的第一步,它需要准确反映问题的求解过程。问题的状态通常是问题的中间结果,或者是最终结果的一部分。
#### 2.3.2 初始条件和边界条件
初始条件通常是指问题的最基本情况,即子问题的解。边界条件是指问题解决范围的限制,它规定了递推关系有效应用的起始点。
#### 2.3.3 状态转移方程的实现
状态转移方程的实现通常是通过编写代码来完成的。在编程实现过程中,需要注意数组或矩阵的下标管理、状态值的初始化、以及循环遍历的逻辑。
```python
# 示例代码块
dp = [[0 for _ in range(n)] for _ in range(m)]
for i in range(1, m+1):
for j in range(1, n+1):
dp[i][j] = max(dp[i-1][j], dp[i][j-1]) + cost[i][j]
```
在上述代码中,我们定义了一个二维数组 `dp`,它用于存储从起点到达每一个点的最大收益。`cost` 是一个二维数组,表示到达每一个点所需要支付的代价。状态转移方程是 `dp[i][j] = max(dp[i-1][j], dp[i][j-1]) + cost[i][j]`,它表示当前位置的最大收益是由其上方和左方的最大收益转移而来。
接下来,我们将深入分析动态规划在实际问题中的应用和优化策略。
# 3. 动态规划实战技巧
## 3.1 动态规划的优化策略
### 3.1.1 记忆化搜索
在进行动态规划时,一个常见的优化技巧是记忆化搜索(Memoization)。这种方法通过对已经计算过的结果进行存储,避免了重复计算,可以显著提高算法的效率。记忆化搜索通过使用一个缓存(通常是一个数组或哈希表)来保存子问题的解,当同样的子问题再次出现时,我们可以直接从缓存中获取结果,而无需重新计算。
以计算斐波那契数列为例,未经优化的递归算法的效率非常低,其时间复杂度为指数级。通过记忆化搜索,我们可以将时间复杂度降低到线性级别。
```python
def fibonacci(n, memo={}):
if n in memo:
return memo[n]
if n == 0:
return 0
elif n == 1:
return 1
else:
memo[n] = fibonacci(n - 1, memo) + fibonacci(n - 2, memo)
return memo[n]
```
在这个例子中,`memo`字典用于存储斐波那契数列中每个数字的计算结果。当函数被调用时,它首先检查当前数字是否已经在`memo`中。如果是,就直接返回结果,否则就进行递归计算并将结果保存在`memo`中。
### 3.1.2 空间优化技巧
动态规划的另一个优化策略是减少存储空间的需求。在一些情况下,我们可以通过滚动数组(Rolling Array)或者单行动态规划(Space Optimized DP)来减少空间复杂度。
滚动数组的方法适用于那些只依赖于当前行或列之前的几个状态的动态规划问题。例如,在0-1背包问题中,我们只需要前一行的状态信息就可以计算出当前行的状态,因此我们可以只保留两行的状态信息,而不是整个二维数组。
```python
# 0-1背包问题的空间优化版本
def knapsack(values, weights, capacity):
n = len(values)
dp = [[0 for _ in range(capacity + 1)] for _ in range(2)]
for i in range(1, n + 1):
for w in range(1, capacity + 1):
if weights[i-1] <= w:
dp[i % 2][w] = max(dp[(i-1) % 2][w], values[i-1] + dp[(i-1) % 2][w-weights[i-1]])
else:
dp[i % 2][w] = dp[(i-1) % 2][w]
return dp[n % 2][capacity]
```
在这个代码中,我们只使用了一个长度为`capacity + 1`的数组来存储状态,通过模运算来实现滚动更新,从而将空间复杂度降低到了`O(capacity)`。
## 3.2 动态规划的问题类型
### 3.2.1 最优子结构问题
最优子结构是动态规划中的一个核心概念,指的是问题的最优解包含其子问题的最优解。也就是说,问题可以通过组合其子问题的最优解来构造出最优解。许多动态规划问题都具有这种性质,例如背包问题、最长公共子序列(LCS)、最短路径问题等。
在解决这类问题时,我们通常定义一个状态`dp[i]`表示解决前`i`个子问题的最优解。然后,我们通过分析状态转移方程来描述状态之间的依赖关系。状态转移方程通常是问题解决的关键,它规定了如何从前一个或几个状态推导出当前状态。
### 3.2.2 背包问题
背包问题是一种典型的组合优化问题。它描述的是:给定一组物品,每种物品都有自己的重量和价值,在限定的总重量内,我们应该如何选择装入背包的物品,使得背包中的总价值最大。
背包问题有多种变体,其中最著名的是0-1背包问题。在0-1背包问题中,我们不能将物品分割,要么装入背包,要么不装,因此得名0-1。
```plaintext
给定两个整数数组 weights[] 和 values[],它们分别代表物品
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**Python数据结构训练营**
本专栏深入探讨Python数据结构的奥秘,从基础到高级,帮助初学者掌握编程的基石。专栏涵盖了广泛的主题,包括:
* 数据结构秘籍:解锁初学者编程的奥秘
* 栈与队列:掌握数据流动的艺术
* 递归技巧:数据结构中的魔法武器
* 高级数据结构:树和图算法实现
* 二叉树算法实战:构建与遍历全攻略
* 哈希表与字典:掌握数据结构核心对比
* 高级数据结构指南:B树、堆和优先队列详解
* 链表深度解析:单向与双向链表的实现艺术
* 数据结构实战小结:选择合适结构解决实际问题
* 面试数据结构必备:常见面试题与解答
* 数据结构优化宝典:降低时间与空间复杂度
* 算法与数据结构:动态规划实战应用
* 算法与数据结构:贪心算法精解
* 算法与数据结构:回溯法解题全攻略
* 深入理解数据结构:内存管理与性能优化技巧
* 自定义数据结构实战:从理论到实践
通过深入浅出的讲解和丰富的代码示例,本专栏将帮助您构建坚实的数据结构基础,为您的编程之旅奠定坚实的基础。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【PHPWord:自动化交叉引用与目录】:一键生成文档结构

# 摘要
本文详细介绍了PHPWord库在处理Word文档时的基础和高级功能,覆盖了从基础文档结构的概念到自动化文档功能的实现。文章首先阐述了PHPWord的基本使用,包括文档元素的创建与管理,如标题、段落、图片、表格、列表和脚注。随后,深入讨论了自动化交叉引用与目录生成的方法,以及如何在实际项目中运用P
伺服电机调试艺术:三菱MR-JE-A调整技巧全攻略

# 摘要
伺服电机在现代自动化和机器人技术中发挥着核心作用,其性能和稳定性对于整个系统的运行至关重要。本文从伺服电机的基础知识和调试概述开始,详细介绍了三菱MR-JE-A伺服驱动器的安装步骤、
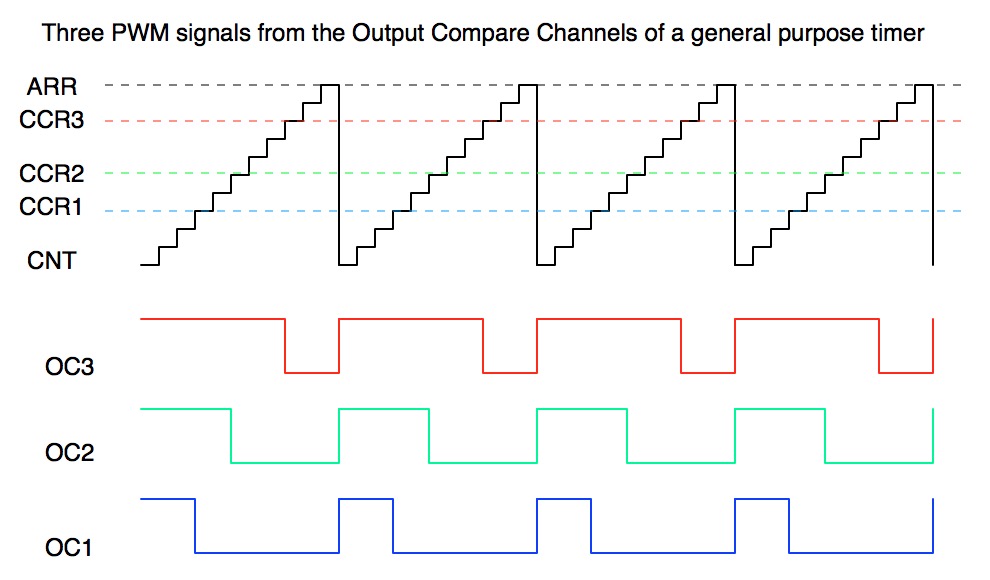
深入STM32 PWM控制:5大策略教你高效实现波形调整
# 摘要
PWM(脉冲宽度调制)控制技术是微控制器应用中一种重要的信号处理方法,尤其在STM32微控制器上得到了广泛应用。本文首先概述了PWM控制的基本概念,介绍了PWM的工作原理、关键参数以及与微控制器的交互方式。接着,本文深入探讨了PWM波形调整的实践技巧,包括硬件定时器配置、软件算法应用,以及调试与优化的策略。文章进一步阐述了PWM控制在进阶应用中的表现,如多通道同步输出
版本控制基础深度解析:项目文档管理演进全攻略
# 摘要
版本控制作为软件开发过程中的核心组成部分,确保了代码的有序管理与团队协作的高效性。本文首先概述了版本控制的重要性,并对其理论基础进行了详细解析,包括核心概念的定义、基本术语、分类选择以及工作流程。随后,文章提供了针对Git、SVN和Mercurial等不同版本控制系统的基础操作指南,进一步深入到高级技巧与应用,如分支管理策
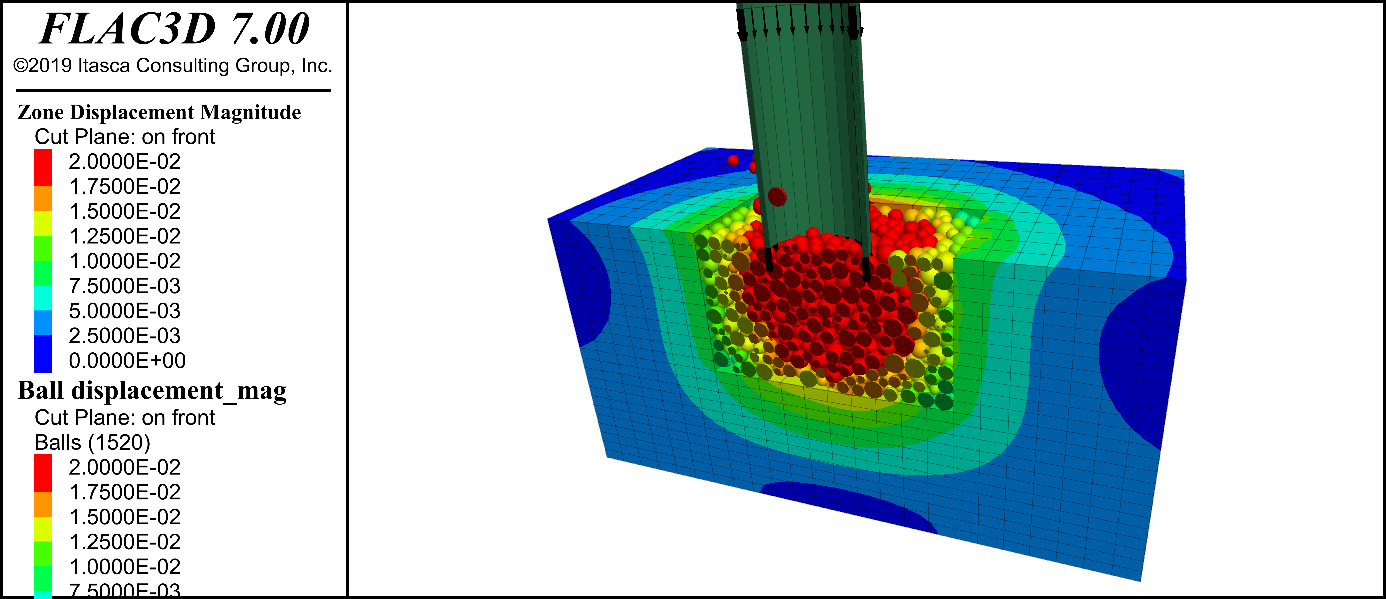
【Flac3D命令进阶技巧】:工作效率提升的7大秘诀,专家级工作流
# 摘要
本文详细探讨了Flac3D命令的高级功能及其在工程建模与分析中的应用。首先,文章介绍了Flac3D命令的基本与高级参数设置,强调了参数定义、使用和效果,以及调试和性能优化的重要性。其次,文章阐述了通过Flac3D命令建立和分析模型的过程,包括模型的建立、修改、分析和优化方法,特别是对于复杂模型的应用。第三部分深入探讨了Flac3D命令的脚本编程、自定义功能和集成应用,以及这些高级应用如何提高工作效率和分析准确性。最后,文章研究了Flac3D命令
【WPS与Office转换PDF实战】:全面提升转换效率及解决常见问题

# 摘要
本文综述了PDF转换技术及其应用实践,涵盖从WPS和Office软件内直接转换到使用第三方工具和自动化脚本的多种方法。文章不仅介绍了基本的转换原理和操作流程,还探讨了批量转换和高级功能的实现,同时关注转换
犯罪地图分析:ArcGIS核密度分析的进阶教程与实践案例
# 摘要
犯罪地图分析是利用地理信息系统(GIS)技术对犯罪数据进行空间分析和可视化的重要方法,它有助于执法机构更有效地理解犯罪模式和分布。本文首先介绍了犯罪地图分析的理论基础及其重要性,然后深入探讨了ArcGIS中的核密度分析技术,包括核密度估计的理论框架、工具操作以及高级设置。随后,文章通过实践应用,展现了如何准备数据、进行核密度分析并应用于实际案例研究中。在此基础上,进一
【Tetgen实用技巧】:提升你的网格生成效率,精通复杂模型处理

# 摘要
Tetgen是一款功能强大的网格生成软件,广泛应用于各类工程和科研领域。本文首先介绍了Tetgen的基本概念、安装配置方法,进而解析了其核心概念,包括网格生成的基础理论、输入输出格式、主要功能模块等。随后,文章提供了提升Tetgen网格生成效率的实用技巧,以及处理复杂模型的策略和高级功能应用。此外,本文还探讨了Tetgen在有限元分析、计算
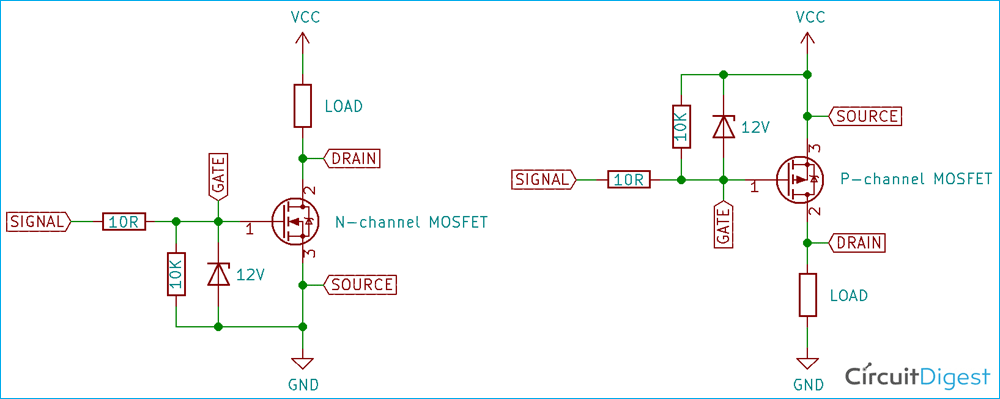
【MOSFET开关特性】:Fairchild技术如何通过节点分布律优化性能
# 摘要
本文深入探讨了MOSFET开关特性的基础理论及其在Fairchild技术中的应用,重点分析了节点分布律在优化MOSFET性能中的作用,包括理论基础和实现方法。通过对比Fairchild技术下的性能数据和实际应用案例研究,本文揭示了节点分布律如何有效提升MOSFET的开关速度与降低功耗。最后,本文展望了MOS
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )