动态规划精髓:揭开动态规划的思想与本质
发布时间: 2024-08-24 13:37:24 阅读量: 35 订阅数: 38 

Spring技术内幕:深入解析Spring架构与设计原理 2/2

# 1. 动态规划概述**
动态规划是一种求解最优化问题的技术,它将问题分解成较小的子问题,并通过逐步求解子问题来解决整个问题。动态规划的本质是将子问题的解存储起来,避免重复计算,从而提高效率。
动态规划通常适用于具有以下特征的问题:
- **最优化问题:**问题目标是找到最优解。
- **子问题重叠:**子问题在求解过程中会被重复计算。
- **最优子结构:**问题的最优解可以从其子问题的最优解中得到。
# 2. 动态规划的理论基础
### 2.1 动态规划的基本思想
动态规划是一种解决优化问题的算法设计范式,其基本思想是将一个复杂的问题分解成一系列子问题,然后以自底向上的方式逐步求解这些子问题,最终得到整个问题的最优解。
动态规划的本质在于:
- **子问题重叠:**子问题在求解过程中会重复出现。
- **最优子结构:**一个问题的最优解可以由其子问题的最优解组合而成。
### 2.2 动态规划的特征和适用场景
动态规划具有以下特征:
- **自底向上:**从最小的子问题开始求解,逐步解决更大的子问题。
- **记忆化:**将已求解的子问题的解存储起来,避免重复计算。
- **最优性:**每个子问题的解都是最优的,从而保证整个问题的解也是最优的。
动态规划适用于以下场景:
- **子问题重叠:**问题可以分解成子问题,且子问题之间存在重叠。
- **最优子结构:**问题的最优解可以由其子问题的最优解组合而成。
- **可行解空间有限:**问题的可行解数量有限,可以通过穷举或迭代的方式找到最优解。
### 代码示例:斐波那契数列求解
斐波那契数列是一个经典的动态规划问题。其定义如下:
```python
fib(0) = 0
fib(1) = 1
fib(n) = fib(n-1) + fib(n-2)
```
使用动态规划求解斐波那契数列的代码如下:
```python
def fib(n):
# 初始化记忆化表
memo = {0: 0, 1: 1}
# 递归求解,同时将结果存储在记忆化表中
if n not in memo:
memo[n] = fib(n-1) + fib(n-2)
return memo[n]
```
**代码逻辑分析:**
- 函数 `fib` 接受一个正整数 `n` 作为参数,返回斐波那契数列的第 `n` 项。
- 函数首先检查 `n` 是否在记忆化表 `memo` 中,如果存在,则直接返回存储的值。
- 如果 `n` 不在记忆化表中,则递归调用函数 `fib(n-1)` 和 `fib(n-2)`,并将结果存储在记忆化表中。
- 最终返回记忆化表中 `n` 对应的值。
**参数说明:**
- `n`:斐波那契数列的第 `n` 项。
**时间复杂度:**
使用记忆化后的动态规划算法,斐波那契数列的求解时间复杂度为 O(n),其中 n 为斐波那契数列的项数。
# 3.1 斐波那契数列求解
斐波那契数列是一个经典的动态规划问题,其定义如下:
```
F(n) = {
1, n = 0
1, n = 1
F(n-1) + F(n-2), n > 1
}
```
#### 递归求解
最直接的求解方法是递归,但这种方法的效率非常低,因为对于每个 n,都需要计算 F(n-1) 和 F(n-2),导致大量的重复计算。
```python
def fibonacci_recursive(n):
if n == 0 or n == 1:
return 1
else:
return fibonacci_recursive(n-1) + fibonacci_recursive(n-2)
```
#### 动态规划求解
动态规划的思想是将问题分解成子问题,并存储子问题的解,以避免重复计算。对于斐波那契数列,可以定义一个 memo 数组来存储已经计算过的结果。
```python
def fibonacci_dp(n, memo={}):
if n in memo:
return memo[n]
if n == 0 or n == 1:
return 1
else:
result = fibonacci_dp(n-1, memo) + fibonacci_dp(n-2, memo)
memo[n] = result
return result
```
#### 优化
对于斐波那契数列,还可以进一步优化动态规划算法。由于每次只用到前两个数,因此可以只用两个变量来存储状态。
```python
def fibonacci_optimized(n):
a, b = 0, 1
for _ in range(n):
a, b = b, a + b
return a
```
#### 分析
动态规划求解斐波那契数列的效率远高于递归求解,因为避免了大量的重复计算。优化后的算法的时间复杂度为 O(n),而递归求解的时间复杂度为 O(2^n)。
# 4. 动态规划的算法设计
### 4.1 状态定义和转移方程
动态规划算法的核心在于状态定义和转移方程的设计。状态定义描述了问题求解过程中需要记录的信息,而转移方程则定义了如何从已知状态推导出未知状态。
**状态定义:**
状态定义因问题而异,但通常包括以下要素:
- **子问题:**问题被分解成更小的子问题,每个子问题对应一个状态。
- **状态参数:**描述子问题所需的信息,例如数组索引、位置坐标等。
- **状态值:**子问题的最优解或中间结果。
**转移方程:**
转移方程描述了如何从已知状态推导出未知状态。它通常遵循以下形式:
```
dp[i][j] = f(dp[i-1][j], dp[i][j-1], ...)
```
其中:
- `dp[i][j]` 表示状态 `(i, j)` 的状态值。
- `dp[i-1][j]` 和 `dp[i][j-1]` 表示状态 `(i, j)` 的相邻状态。
- `f` 是一个函数,用于计算当前状态的值。
### 4.2 自底向上和自顶向下的求解方法
动态规划算法有两种求解方法:自底向上和自顶向下。
**自底向上:**
自底向上方法从最小的子问题开始,逐步推导出更大的子问题,最终得到问题的整体最优解。它遵循以下步骤:
1. 初始化所有子问题的状态值。
2. 逐层计算子问题的状态值,从最小的子问题开始。
3. 每次计算时,使用转移方程从已知状态推导出未知状态。
**自顶向下:**
自顶向下方法从问题整体出发,逐步分解成更小的子问题,并递归求解这些子问题。它遵循以下步骤:
1. 检查子问题是否已经求解过。
2. 如果没有,则分解子问题成更小的子问题。
3. 递归求解子问题。
4. 将子问题的最优解合并为当前子问题的最优解。
### 4.3 空间优化和记忆化
动态规划算法通常需要存储大量中间状态,这可能会导致空间复杂度较高。为了优化空间复杂度,可以使用以下技术:
**空间优化:**
空间优化通过减少存储的状态数量来优化空间复杂度。例如,对于斐波那契数列求解问题,只需要存储前两个状态值即可。
**记忆化:**
记忆化通过存储已经求解过的子问题的最优解来避免重复计算。当需要求解一个子问题时,首先检查它是否已经存储,如果已存储,则直接返回存储的值。
# 5.1 树形动态规划
树形动态规划是一种动态规划技术,用于解决树形结构的问题。树形结构是一种层次结构,其中每个节点都有一个父节点(除了根节点)和任意数量的子节点。
### 树形动态规划的基本思想
树形动态规划的基本思想是将树形问题分解为一系列子问题,并通过自底向上的方式解决这些子问题。对于每个子问题,我们定义一个状态,表示该子问题的最优解,并使用转移方程来计算该状态。
### 树形动态规划的应用场景
树形动态规划可以应用于各种树形结构问题,例如:
- 树形结构的最小生成树求解
- 树形结构的直径求解
- 树形结构的重心求解
- 树形结构的节点深度求解
### 树形动态规划的算法设计
树形动态规划的算法设计通常涉及以下步骤:
1. **定义状态:**定义一个状态来表示每个子问题的最优解。
2. **定义转移方程:**定义一个转移方程来计算每个状态。转移方程通常涉及子节点的状态。
3. **自底向上求解:**从树的叶子节点开始,自底向上计算每个节点的状态。
### 树形动态规划的代码示例
下面是一个求解树形结构最小生成树的树形动态规划代码示例:
```python
def min_spanning_tree(graph):
"""
求解树形结构的最小生成树。
参数:
graph:树形结构,用邻接表表示。
返回:
最小生成树的边集。
"""
# 初始化状态:每个节点的最小生成树为其自身
states = [set() for _ in range(len(graph))]
# 自底向上求解
for node in range(len(graph) - 1, -1, -1):
# 对于每个节点
for neighbor in graph[node]:
# 对于每个相邻节点
if neighbor > node:
# 如果相邻节点的编号大于当前节点
states[node].add((node, neighbor))
states[node].update(states[neighbor])
# 返回最小生成树的边集
return states[0]
```
### 树形动态规划的分析
上面的代码示例中:
- 状态:`states[node]`表示节点`node`的最小生成树的边集。
- 转移方程:对于节点`node`,其最小生成树的边集包括与`node`相邻的节点`neighbor`的最小生成树的边集,以及`(node, neighbor)`这条边。
- 自底向上求解:从叶子节点开始,自底向上计算每个节点的状态。
# 6.1 动态规划的局限性
动态规划算法虽然强大,但也有其局限性:
- **时间复杂度高:**动态规划算法通常需要遍历整个问题空间,这会导致时间复杂度较高,尤其是对于大规模问题。
- **空间复杂度高:**动态规划算法需要存储整个问题空间的中间结果,这会导致空间复杂度较高,尤其是对于状态空间较大的问题。
- **难以处理约束条件:**动态规划算法难以处理具有复杂约束条件的问题,例如不可重叠子问题或非线性转移方程。
- **难以并行化:**动态规划算法通常具有串行性,难以并行化,这限制了其在多核处理器或分布式系统上的性能。
## 6.2 动态规划的优化和创新
为了克服动态规划的局限性,研究人员一直在探索优化和创新的方法:
- **近似算法:**近似算法通过牺牲精确性来降低时间或空间复杂度,从而解决大规模问题。
- **启发式算法:**启发式算法使用启发式规则来指导搜索,从而找到问题空间中接近最优解的解。
- **并行算法:**并行算法通过将问题空间分解为多个子问题并同时求解,来提高动态规划算法的性能。
- **混合算法:**混合算法将动态规划算法与其他算法相结合,例如贪心算法或局部搜索,以提高效率和鲁棒性。
这些优化和创新方法正在不断拓展动态规划算法的适用范围,使其能够解决更复杂和更大规模的问题。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
《动态规划的基本思想与应用实战》专栏深入探讨了动态规划算法的奥秘和应用。它从入门宝典开始,揭示动态规划的思想和本质,并介绍了五大基石,掌握动态规划问题的关键要素。专栏还提供了实战演练,展示了动态规划在真实场景中的应用。此外,它深入剖析了经典问题的解决之道,解密了算法效率的奥秘,并提供了提升算法效率的必杀技。专栏还探索了动态规划的变种,揭示了算法的无限可能。它全面介绍了动态规划的应用领域,并将其与贪心算法、分治算法、回溯算法、线性规划、整数规划、图论、机器学习和数据结构等其他算法进行了比较和分析,突出了动态规划在算法竞赛中的重要性。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
JY01A直流无刷IC全攻略:深入理解与高效应用

# 摘要
本文详细介绍了JY01A直流无刷IC的设计、功能和应用。文章首先概述了直流无刷电机的工作原理及其关键参数,随后探讨了JY01A IC的功能特点以及与电机集成的应用。在实践操作方面,本文讲解了JY01A IC的硬件连接、编程控制,并通过具体
数据备份与恢复:中控BS架构考勤系统的策略与实施指南

# 摘要
在数字化时代,数据备份与恢复已成为保障企业信息系统稳定运行的重要组成部分。本文从理论基础和实践操作两个方面对中控BS架构考勤系统的数据备份与恢复进行深入探讨。文中首先阐述了数据备份的必要性及其对业务连续性的影响,进而详细介绍了不同备份类型的选择和备份周期的制定。随后,文章深入解析了数据恢复的原理与流程,并通过具体案例分析展示了恢复技术的实际应用。接着,本文探讨
【TongWeb7负载均衡秘笈】:确保请求高效分发的策略与实施
.webp)
# 摘要
本文从基础概念出发,对负载均衡进行了全面的分析和阐述。首先介绍了负载均衡的基本原理,然后详细探讨了不同的负载均衡策略及其算法,包括轮询、加权轮询、最少连接、加权最少连接、响应时间和动态调度算法。接着,文章着重解析了TongWeb7负载均衡技术的架构、安装配置、高级特性和应用案例。在实施案例部分,分析了高并发Web服务和云服务环境下负载
【Delphi性能调优】:加速进度条响应速度的10项策略分析

# 摘要
本论文首先概述了信号定位技术的基本概念和重要性,随后深入分析了三角测量和指纹定位两种主要技术的工作原理、实际应用以及各自的优势与不足。通过对三角测量定位模型的解析,我们了解到其理论基础、精度影响因素以及算法优化策略。指纹定位技术部分,则侧重于其理论框架、实际操作方法和应用场
【PID调试实战】:现场调校专家教你如何做到精准控制
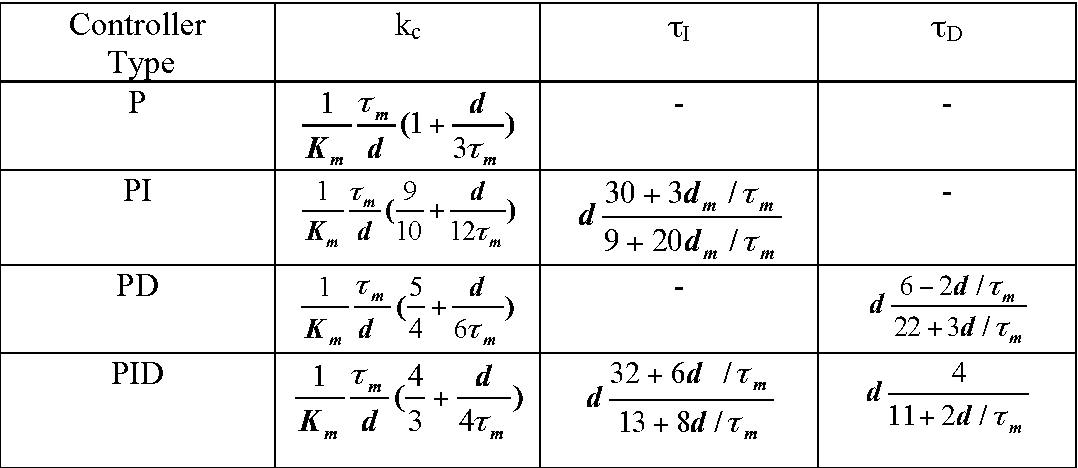
# 摘要
PID控制作为一种历史悠久的控制理论,一直广泛应用于工业自动化领域中。本文从基础理论讲起,详细分析了PID参数的理论分析与选择、调试实践技巧,并探讨了PID控制在多变量、模糊逻辑以及网络化和智能化方面的高级应用。通过案例分析,文章展示了PID控制在实际工业环境中的应用效果以及特殊环境下参数调整的策略。文章最后展望了PID控制技术的发展方
网络同步新境界:掌握G.7044标准中的ODU flex同步技术
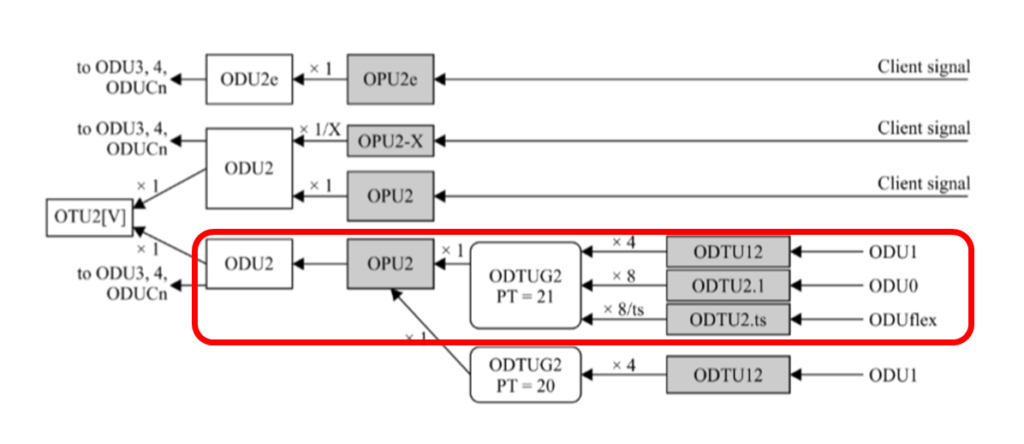
# 摘要
本文详细探讨了G.7044标准与ODU flex同步技术,首先介绍了该标准的技术原理,包括时钟同步的基础知识、G.7044标准框架及其起源与应用背景,以及ODU flex技术
字符串插入操作实战:insert函数的编写与优化
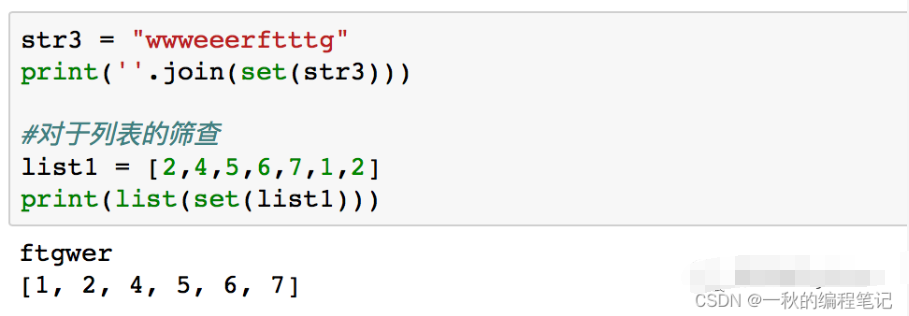
# 摘要
字符串插入操作是编程中常见且基础的任务,其效率直接影响程序的性能和可维护性。本文系统地探讨了字符串插入操作的理论基础、insert函数的编写原理、使用实践以及性能优化。首先,概述了insert函数的基本结构、关键算法和代码实现。接着,分析了在不同编程语言中insert函数的应用实践,并通过性能测试揭示了各种实现的差异。此外,本文还探讨了性能优化策略,包括内存使用和CPU效率提升,并介绍了高级数据结
环形菜单的兼容性处理

# 摘要
环形菜单作为一种用户界面元素,为软件和网页设计提供了新的交互体验。本文首先介绍了环形菜单的基本知识和设计理念,重点探讨了其通过HTML、CSS和JavaScript技术实现的方法和原理。然后,针对浏览器兼容性问题,提出了有效的解决方案,并讨论了如何通过测试和优化提升环形菜单的性能和用户体验。本
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )