
lens object
film
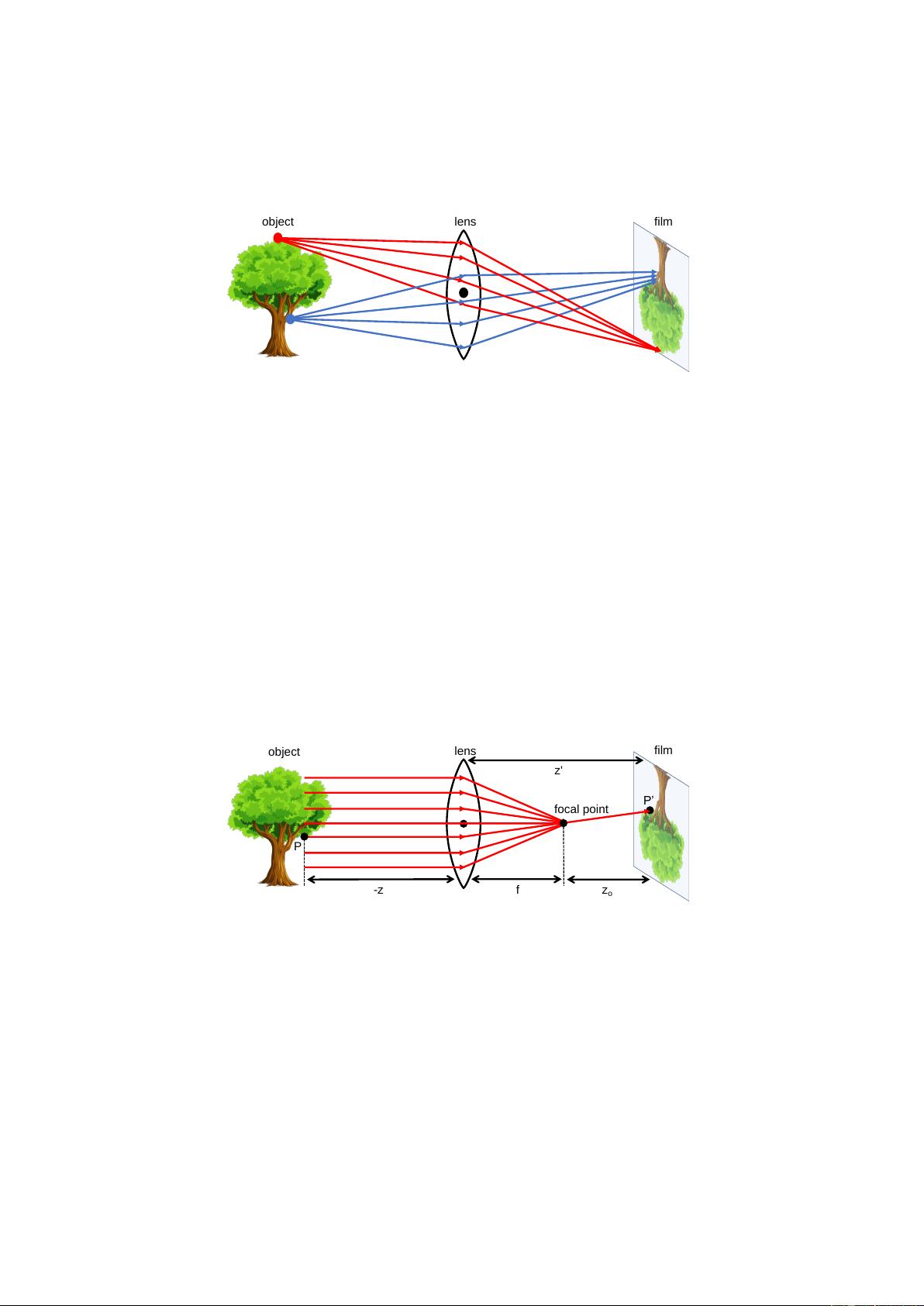
Figure 4: A setup of a simple lens model. Notice how the rays of the top
point on the tree converge nicely on the film. However, a point at a different
distance away from the lens results in rays not converging perfectly on the
film.
in the image plane. Therefore, the problem of the majority of the light rays
blocked due to a small aperture is removed (Figure 4). However, please note
that this property does not hold for all 3D points, but only for some specific
point P . Take another point Q which is closer or further from the image
plane than P . The corresponding projection into the image will be blurred
or out of focus. Thus, lenses have a specific distance for which objects are
“in focus”. This property is also related to a photography and computer
graphics concept known as depth of field, which is the effective range at
which cameras can take clear photos.
lens
film
object
z'
z
o
-z
f
P
P’
focal point
Figure 5: Lenses focus light rays parallel to the optical axis into the fo-
cal point. Furthermore, this setup illustrates the paraxial refraction model,
which helps us find the relationship between points in the image plane and
the 3D world in cameras with lenses.
Camera lenses have another interesting property: they focus all light rays
traveling parallel to the optical axis to one point known as the focal point
(Figure 5). The distance between the focal point and the center of the lens
is commonly referred to as the focal length f. Furthermore, light rays
4
剩余15页未读,继续阅读

白菜888
- 粉丝: 7
- 资源: 74
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


