
459
which is a subclass of the VisualServo class and implements the controller out-
lined above. The object constructor takes a CentralCamera object as its argu-
ment, and drives this camera to achieve the desired pose relative to the target. Many
additional options can be passed to this class constructor. The display methods shows
the coordinates of the world points, the initial camera pose, and the desired target
relative pose. The simulation is run by
>> pbvs.run();
which repeatedly calls the step method to execute a single time step. The simu-
lation animates both the image plane of the camera and the 3-dimensional visu-
alization of the camera and the world points as shown in Fig. 15.4. The simu-
lation completes after a defined number of iterations or when ξ
∆
falls below some
threshold.
The simulation results are stored within the object for later analysis. We can plot
the path of the target features in the image, the Cartesian velocity versus time or
Cartesian position versus time
>> pbvs.plot_p();
>> pbvs.plot_vel();
>> pbvs.plot_camera();
which are shown in Fig. 15.5. We see that the feature points have followed a curved
path in the image, and that the camera's translation and orientation have converged
smoothly on the desired values.
15.2
l
Image-Based Visual Servoing
IBVS differs fundamentally from PBVS by not estimating the relative pose of the tar-
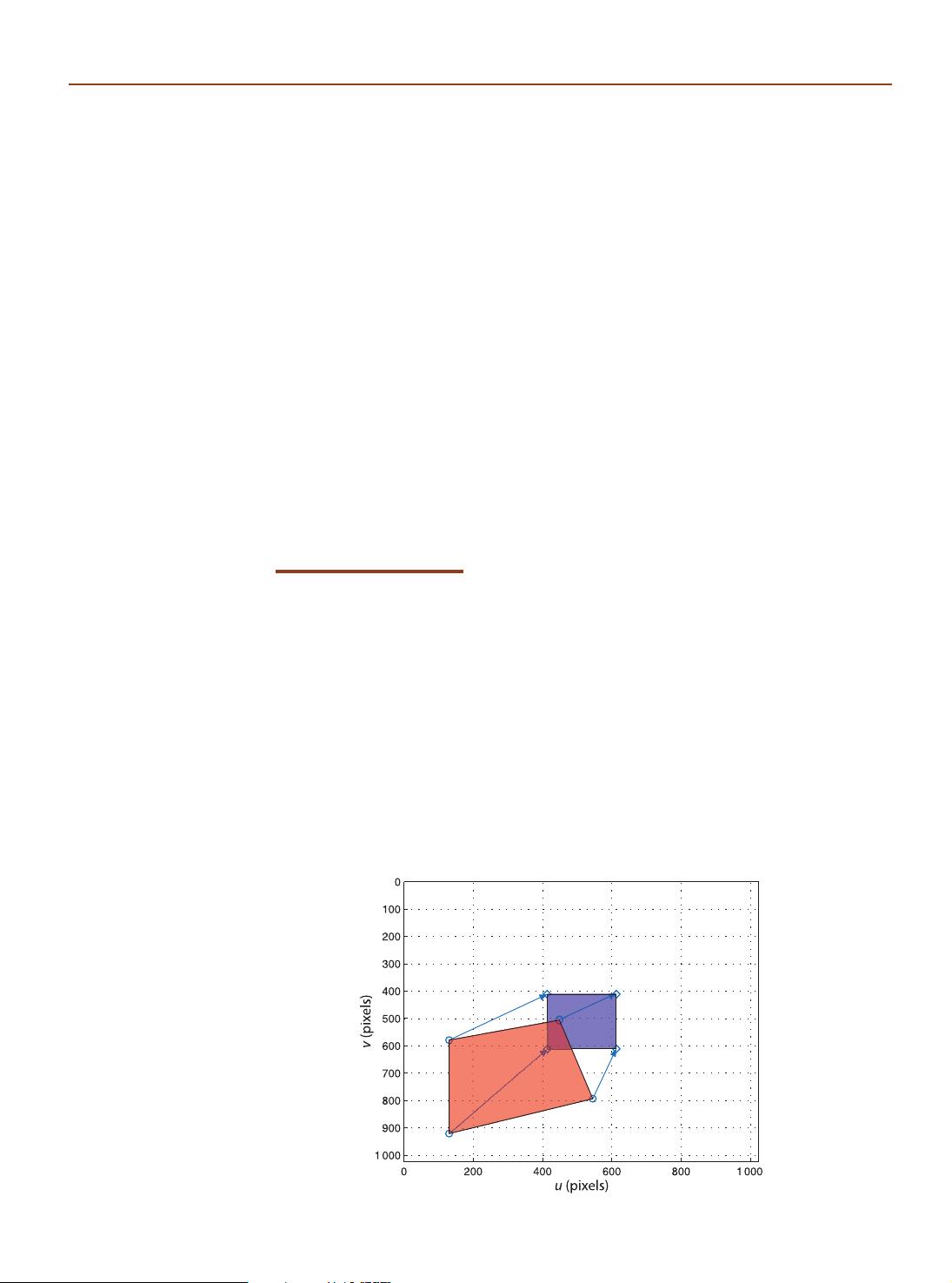
get. The relative pose is implicit in the values of the image features. Figure 15.6 shows
two views of a square target. The view from the initial camera pose is shown in red
and it is clear that the camera is viewing the target obliquely. The desired view is
shown in blue where the camera is further from the target and its optical axis is
normal to the plane of the target – a fronto-parallel view.
The control problem can be expressed in terms of image coordinates. The task
is to move the feature points indicated by
-markers to the points indicated by
-markers. The points may, but do not have to, follow the straight line paths in-
dicated by the arrows. Moving the feature points in the image implicitly changes
the pose – we have changed the problem from pose estimation to control of points
on the image.
Fig. 15.6.
Two views of a square target.
The blue shape is the desired
view, and the red shape is the
initial view
15.2 · Image-Based Visual Servoing
剩余24页未读,继续阅读

qq_14903801
- 粉丝: 5
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- 十种常见电感线圈电感量计算公式详解
- 军用车辆:CAN总线的集成与优势
- CAN总线在汽车智能换档系统中的作用与实现
- CAN总线数据超载问题及解决策略
- 汽车车身系统CAN总线设计与应用
- SAP企业需求深度剖析:财务会计与供应链的关键流程与改进策略
- CAN总线在发动机电控系统中的通信设计实践
- Spring与iBATIS整合:快速开发与比较分析
- CAN总线驱动的整车管理系统硬件设计详解
- CAN总线通讯智能节点设计与实现
- DSP实现电动汽车CAN总线通讯技术
- CAN协议网关设计:自动位速率检测与互连
- Xcode免证书调试iPad程序开发指南
- 分布式数据库查询优化算法探讨
- Win7安装VC++6.0完全指南:解决兼容性与Office冲突
- MFC实现学生信息管理系统:登录与数据库操作
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


