"二自由度蛇形机器人单元设计与运动分析"
版权申诉
14 浏览量
更新于2024-02-23
收藏 978KB DOC 举报
本文研究的主要内容是二自由度蛇形机器人单元设计。其主要目标是利用蛇(它的形态和姿势)做原形来研究具有与蛇的功能相似的蛇形机器人。其主要功能要求:能利用单元之间的摆动是身体与环境之间的摩擦力能在凹凸不平/粗糙的面蜿蜒前进,也能在光滑的表面上滑行前进;能利用关节之间的相对运动实现身体的抬起从而可以跨过小沟、裂缝和障碍物等。蛇形机器人单元之间的摆动和抬起运动本文采用耦合驱动的方式来实现。扭转运动是蛇形机器人的有效运动方式,利用该步伐蛇形机器人可以跨越障碍。在此基础上对蛇形机器人的扭转运动进行了扩展,使蛇形机器人不但能够完成平面的扭转运动,而且可以将扭转运动与其它的运动形式结合起来,完成复合运动。当然这种复合运动不仅仅局限在二维复合运动,还包括比较复杂的三维运动,而且本文提出的简化输入方法有利于蛇形机器人在扭转运动过程中有效适应地形。关键词:蛇形机器人; 机构设计; 耦合驱动; 运动分析;Abstract This paper deals with the two degrees of freedom module of snake-lik;"
本文研究的重点是设计具有与蛇相似功能的蛇形机器人单元,通过利用蛇的摆动和抬起运动来实现其在不同地形上的前进和跨越障碍的能力。文章采用耦合驱动的方法来实现单元之间的摆动和抬起运动,从而使蛇形机器人能够灵活适应各种复杂地形环境。在扭转运动方面,文章对蛇形机器人的运动进行了扩展,使其不仅能够完成平面的扭转运动,还可以与其他运动形式结合,实现复合运动,包括复杂的三维运动。此外,文章提出了简化输入方法,有利于蛇形机器人在扭转运动过程中更有效地适应地形。关键词:蛇形机器人;机构设计;耦合驱动;运动分析。
在该研究中,蛇形机器人的设计是基于蛇的生物特性以及蛇的运动方式而展开的。其主要目的是让机器人能够模仿蛇的摆动和扭转运动,从而实现在复杂地形上的自主移动和跨越障碍。通过耦合驱动的方法,蛇形机器人的单元之间可以实现摆动和抬起运动,从而能够在各种地形上蜿蜒前进。而对于扭转运动,研究通过扩展其运动形式,使其能够完成更加复杂的运动方式,并且结合简化输入方法,提高了蛇形机器人适应地形的能力。这些研究成果对于蛇形机器人的发展和应用具有重要意义,也为未来机器人的设计和运动控制提供了有益的启示。
综上所述,本文通过对二自由度蛇形机器人单元设计的研究,实现了对蛇形机器人摆动、抬起和扭转运动的有效模拟,并提出了耦合驱动和简化输入方法,为蛇形机器人在复杂地形中的自主移动和跨越障碍提供了重要的技术支持。这些成果对于机器人领域的研究和发展具有一定的借鉴意义,也为未来机器人的设计和应用提供了新的思路和方法。
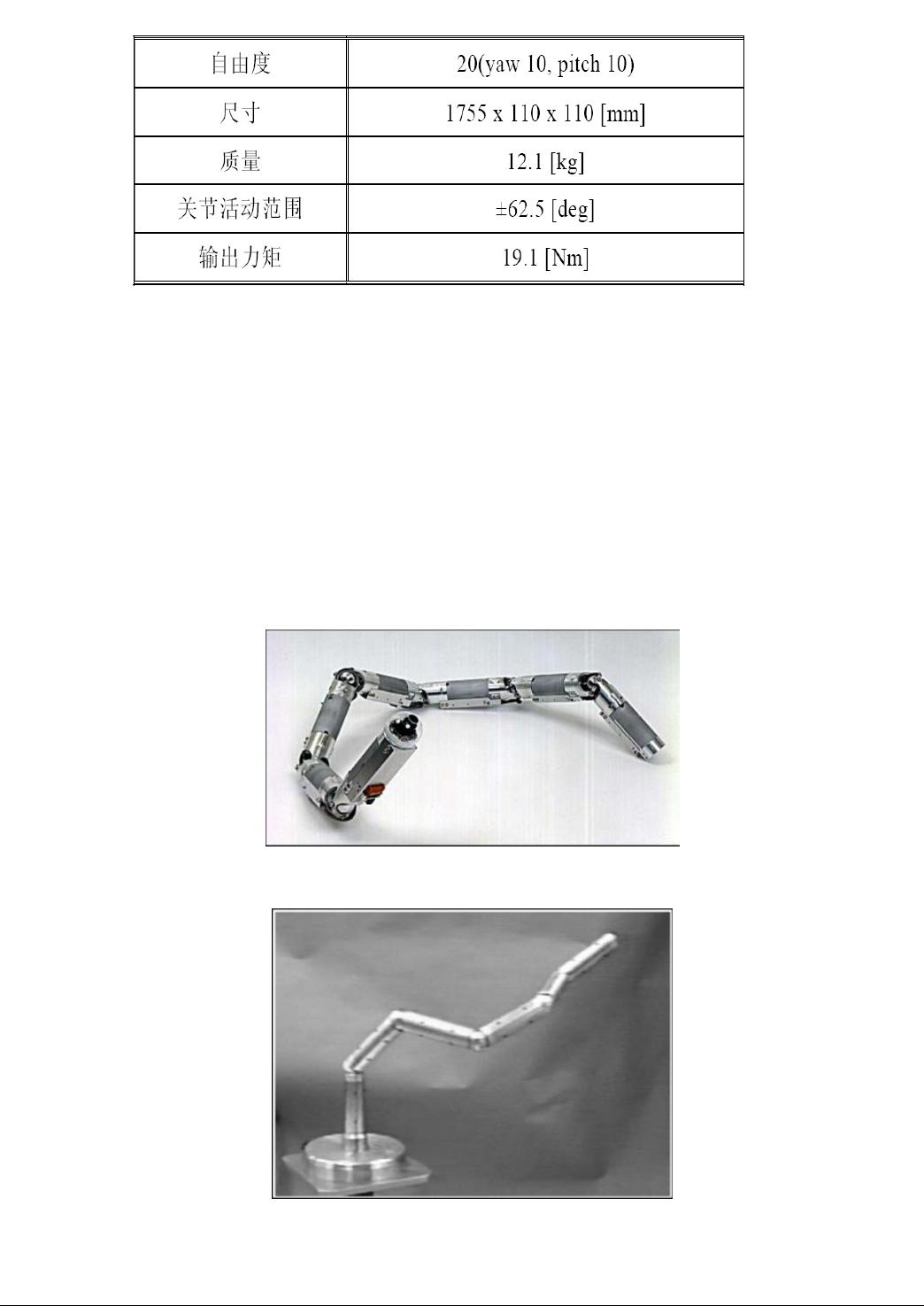
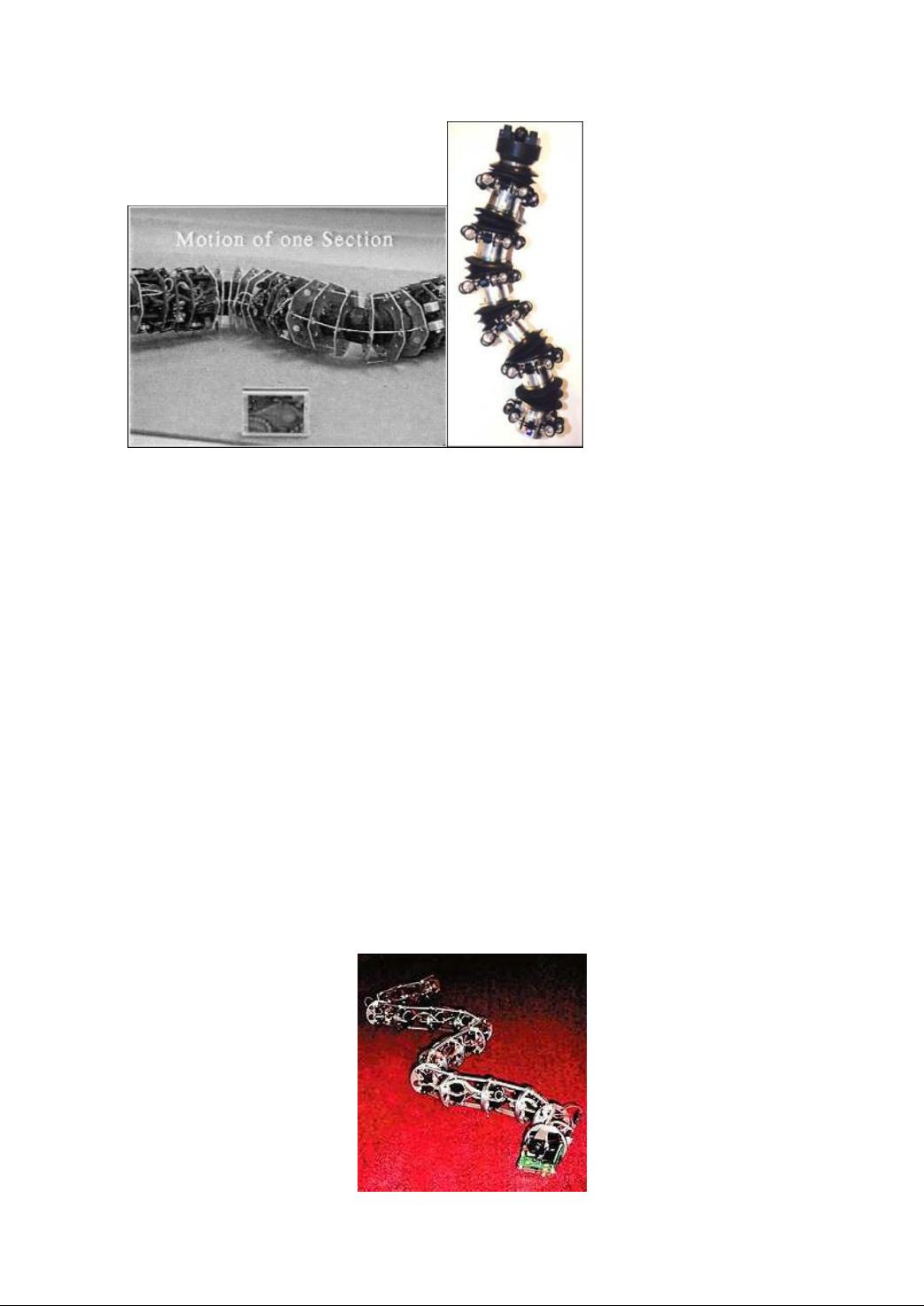
日本的 NEC 公司的 Takanashi 研制了刚性关节连接的蛇形机器人(见图
1.3),该机器人的机构采用了特殊的关节结构,具有 6 个管状的连杆,长 1.4m,
直径 42mm,重 4.6kg,能够实现三维空间运动,可以应用在危险情况下的勘查和
营救工作。
NASA 的 JPL 采用了 NEC 的蛇形机器人结构设计了一种 Serpentine robot,该
机器人约 1m 长,直径 4cm,重量为 3.18kg,具有 12 个自由度(见图 1.4),主要
是完成在存在障碍物的环境中的操作任务
图 1.5 NEC 的蛇形机器人
(图 1.6 JPL 操作手)
剩余36页未读,继续阅读
2023-05-21 上传
2023-07-28 上传
2023-08-11 上传
2023-05-21 上传
2023-05-28 上传
2023-07-22 上传

omyligaga
- 粉丝: 61
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- AirKiss技术详解:无线传递信息与智能家居连接
- Hibernate主键生成策略详解
- 操作系统实验:位示图法管理磁盘空闲空间
- JSON详解:数据交换的主流格式
- Win7安装Ubuntu双系统详细指南
- FPGA内部结构与工作原理探索
- 信用评分模型解析:WOE、IV与ROC
- 使用LVS+Keepalived构建高可用负载均衡集群
- 微信小程序驱动餐饮与服装业创新转型:便捷管理与低成本优势
- 机器学习入门指南:从基础到进阶
- 解决Win7 IIS配置错误500.22与0x80070032
- SQL-DFS:优化HDFS小文件存储的解决方案
- Hadoop、Hbase、Spark环境部署与主机配置详解
- Kisso:加密会话Cookie实现的单点登录SSO
- OpenCV读取与拼接多幅图像教程
- QT实战:轻松生成与解析JSON数据
