
293
12.2
l
Monadic Operations
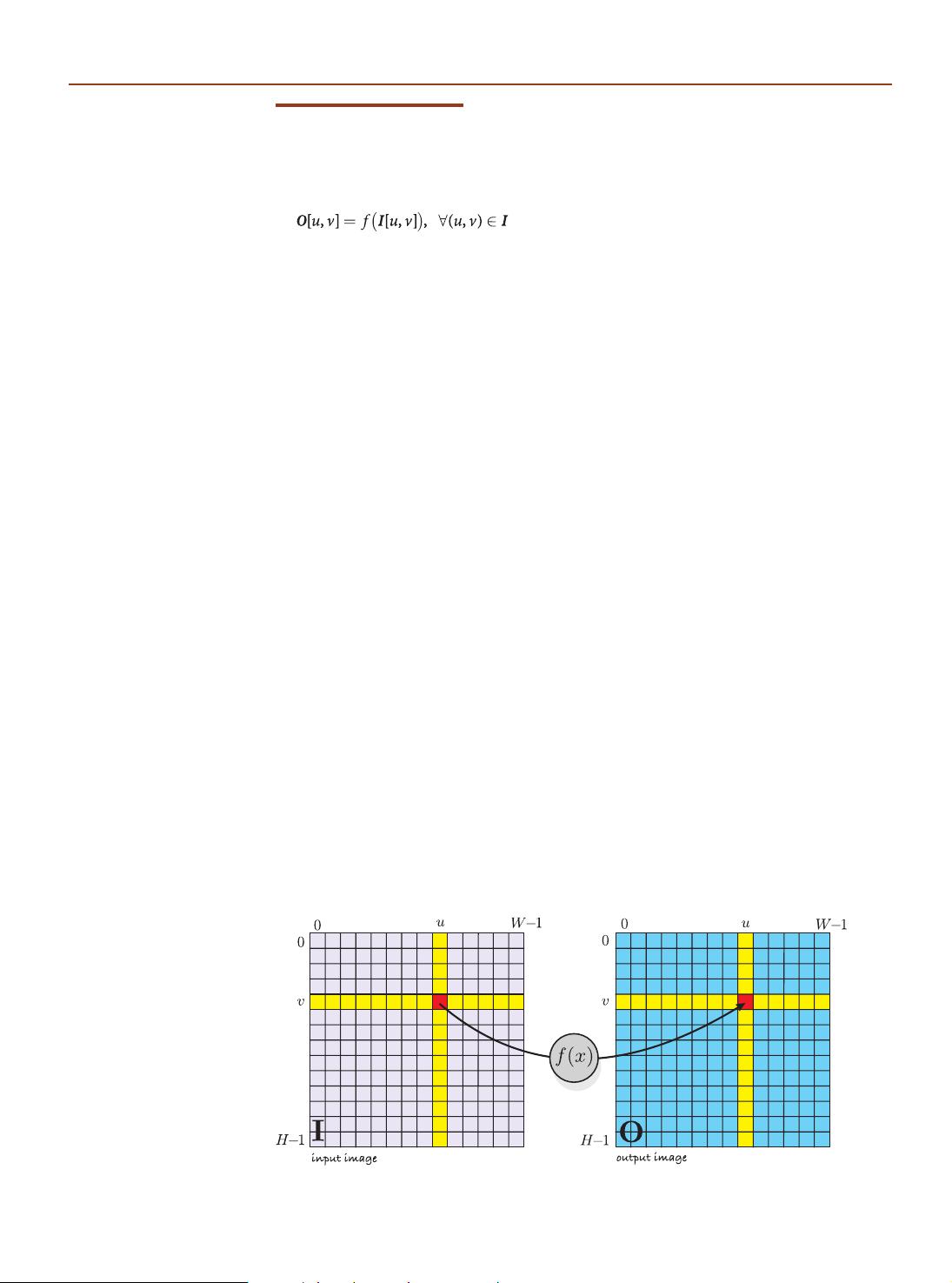
Monadic image-processing operations are shown schematically in Fig. 12.5. The result
is an image of the same size W × H as the input image, and each output pixel is a
function of the corresponding input pixel
Since an image is represented by a matrix any MATLAB® element-wise matrix func-
tion or operator can be applied, for example scalar multiplication or addition, or func-
tions such abs or sqrt.
The datatype of each pixel can be changed, for example from uint8 (integer pixels
in the range [0, 255]) to double precision values in the range [0, 1]
>> imd = idouble(im);
and vice versa
>> im = iint(imd);
A color image has 3-dimensions which we can also consider as a 2-dimensional image
where each pixel value is a 3-vector. A monadic operation can convert a color image to
a greyscale image where each output pixel value is a scalar representing the luminance
of the corresponding input pixel
>> grey = imono(flowers);
The inverse operation is
>> color = icolor(grey);
which returns a 3-dimensional color image where each color plane is equal to grey –
when displayed it is still appears as a monochrome image. We can create a color image
where the red plane is equal to the input image by
>> color = icolor(grey, [1 0 0]);
which is a red tinted version of the original image.
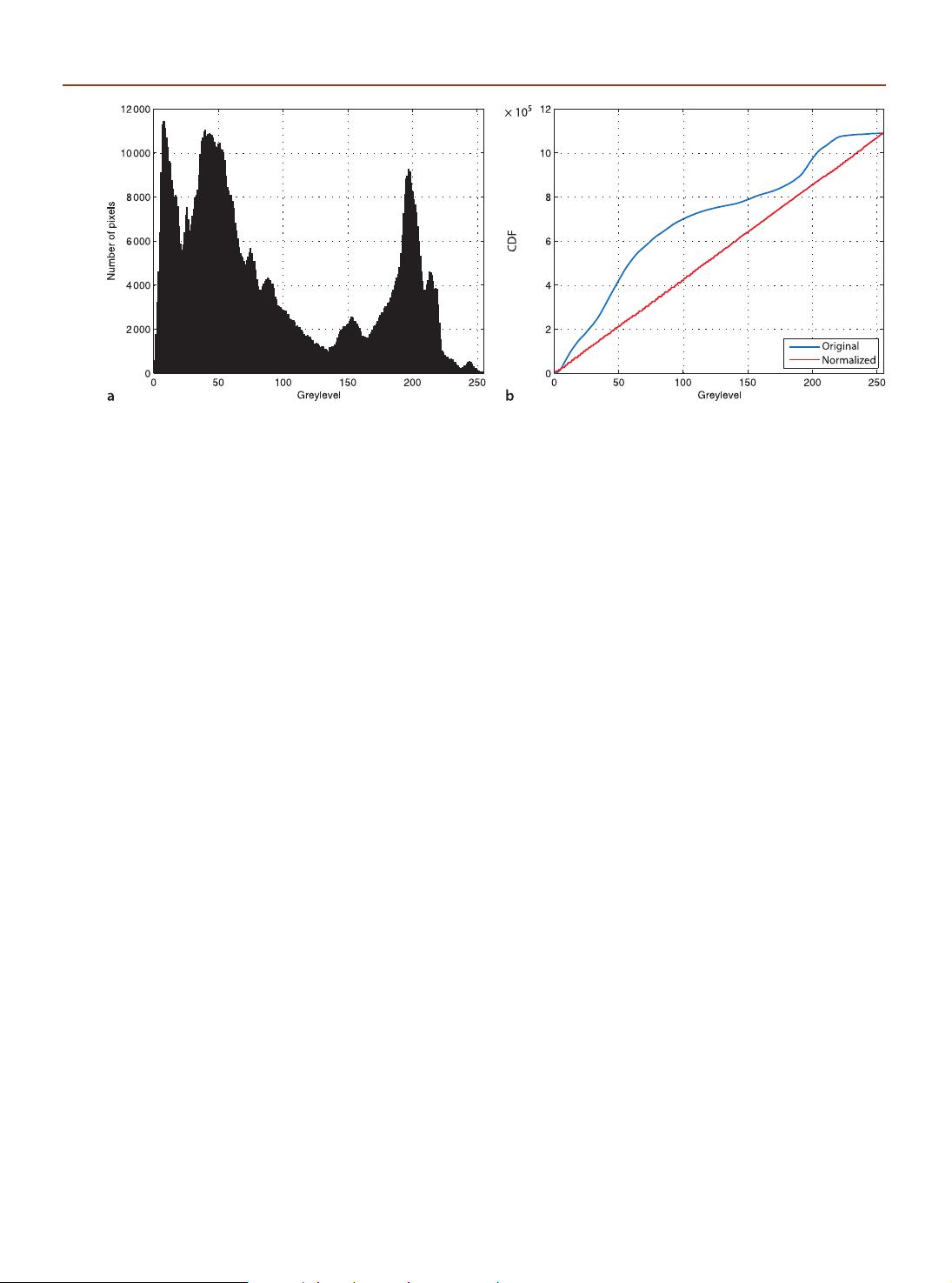
Many monadic operations are concerned with altering the distribution of grey lev-
els within the image. The distribution can be determined by computing the histogram
of the image
which indicates the number of times each pixel value occurs. For ex-
ample the histogram of the street scene is computed and displayed by
>> ihist( street )
and the result is shown in Fig. 12.6a. We see that the grey values (horizontal axis) span
the complete range from 0 to 255 but the distribution is far from uniform. By inspec-
Fig. 12.5.
Monadic image processing
operations. Each output pixel is
a function of the corresponding
input pixel (shown in red)
Which is not a monadic operator since
the result is not an image. Technically it
is form of feature extraction which is
discussed in the next chapter.
12.2 · Monadic Operations
剩余48页未读,继续阅读

qq_14903801
- 粉丝: 5
- 资源: 25
 我的内容管理
展开
我的内容管理
展开







最新资源
- 多模态联合稀疏表示在视频目标跟踪中的应用
- Kubernetes资源管控与Gardener开源软件实践解析
- MPI集群监控与负载平衡策略
- 自动化PHP安全漏洞检测:静态代码分析与数据流方法
- 青苔数据CEO程永:技术生态与阿里云开放创新
- 制造业转型: HyperX引领企业上云策略
- 赵维五分享:航空工业电子采购上云实战与运维策略
- 单片机控制的LED点阵显示屏设计及其实现
- 驻云科技李俊涛:AI驱动的云上服务新趋势与挑战
- 6LoWPAN物联网边界路由器:设计与实现
- 猩便利工程师仲小玉:Terraform云资源管理最佳实践与团队协作
- 类差分度改进的互信息特征选择提升文本分类性能
- VERITAS与阿里云合作的混合云转型与数据保护方案
- 云制造中的生产线仿真模型设计与虚拟化研究
- 汪洋在PostgresChina2018分享:高可用 PostgreSQL 工具与架构设计
- 2018 PostgresChina大会:阿里云时空引擎Ganos在PostgreSQL中的创新应用与多模型存储
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


