机器人学中的旋量理论与几何:教程
需积分: 9 79 浏览量
更新于2024-07-16
1
收藏 847KB PDF 举报
"Geometry and Screw Theory for Robotics" 是一本关于机器人学中的几何与螺旋理论教程,由 Stefano Stramigioli 和 Herman Bruyninckx 于2001年撰写。该教程强调了在机器人领域中,基于螺旋几何和代数的方法相较于其他技术展现出的优势。本书深入探讨了刚体运动、配置、速度、力和动力学等方面的概念。
章节1首先介绍了刚体的运动,从欧几里得空间的基本概念出发,如点、向量、标量积、距离测量、垂直性和向量积,这些是理解机器人运动的基础。作者将刚体的配置描述分为两类:利用Lie群(特别提到SE(3))的方法,以及有限扭(finite twist)描述,这有助于简化复杂系统的分析。
接着,章节转向了刚体的速度,即twists,它们作为SE(3)元素被定义,并与螺旋理论相结合,展示了其在描述刚体旋转和平移速度上的便利性。Wrenches(力矩)也是关键概念,它们同样作为SE(3)中的元素出现,用于表示作用在刚体上的外力和力偶,其在螺旋理论中的应用使得力的解析更加直观。
动力学部分着重于动能、惯性变换以及欧拉方程的讨论,这些都是设计和控制机器人系统时必不可少的物理基础。书中还涵盖了Lie代数的指数映射,特别是SO(3)和SE(3)元素的指数映射,这对于解析刚体运动的动态行为至关重要。
章节2进一步扩展到串行机构的配置动力学,包括刚体链的运动学,通过这些概念,可以理解和分析复杂机械结构的行为,比如关节空间和驱动物理的关联。
总结来说,"Geometry and Screw Theory for Robotics" 提供了一个系统性的框架,帮助读者掌握如何运用螺旋理论这一强大的工具来处理机器人学中的各种问题,从单个刚体的运动控制到多关节机械臂的运动分析,都是本书涵盖的重要知识点。通过学习和应用这些理论,工程师们能够提升设计和优化机器人系统的能力。

1.3. CONFIGURATIONS OF A RIGID BODY
13
R
2
1
is therefore almost identical to the two-dimensional case, but now we are dealing
with a 3 × 3 matrix.
Remark 2 It is important to note that:
• The columns of R
2
1
are the unit vectors along the axes of Ψ
1
, expressed in the coordi-
nate system Ψ
2
.
• The rows of R
2
1
are the the unit vectors along the axes of Ψ
2
, expressed in the coor-
dinate system Ψ
1
.
A direct consequence of this is that the inverse of R
2
1
, i.e., R
1
2
, is equal to the transpose
of R
2
1
. This property holds for any rotation matrix R:
R
−1
= R
T
The following identities are useful properties when rotating any vectors v, w ∈ R
3
:
R(v ∧ w)=(Rv) ∧ (Rw), (1.8)
and
R ˜wR
T
=
(Rw), (1.9)
where the “tilde” operator is defined in Eq. (1.1).
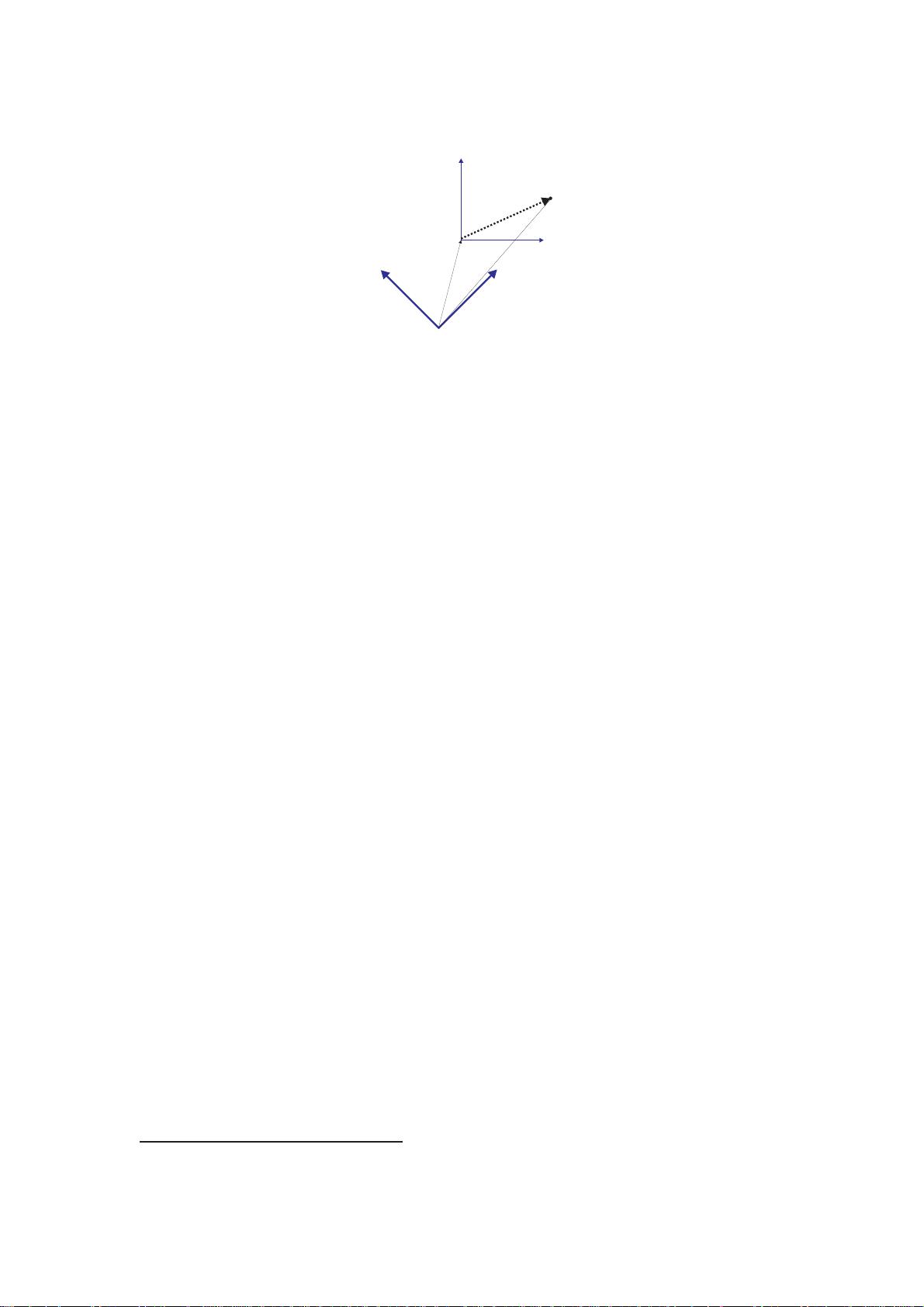
As an example of a rotation in E(3), consider a change of coordinates due to a rotation
of θ around ˆy
1
. The matrix representing this change of coordinates looks like:
R
2
1
=
cos(θ)0sin(θ)
010
−sin(θ)0cos(θ)
.
It is possible to see that the set of matrices satisfying R
−1
= R
T
is a three-dimensional
matrix Lie group, which is called the orthonormal group and indicated with O(3). First,
it fulfills all properties of a group:
• Associativity: R
1
,R
2
,R
3
∈ O(3) ⇒ (R
1
R
2
)R
3
= R
1
(R
2
R
3
).
• Identity: I ∈ O(3).
• Inverse: R ∈ O(3) ⇒ R
−1
∈ O(3),RR
−1
= I.
Moreover, it is a Lie group, because the composition operation is continuous. Since
R
T
R = I, ∀R ∈ O(3), and since the determinant of a product is the product of the
determinants, the determinant of any matrix in O(3) must be ±1. This shows that O(3)
is composed of two disjoint components, one whose matrices have determinant equal to
−1, and one consisting of the matrices with determinant equal to +1. The former is not
a group by itself, because the product of two such matrices has determinant +1. The
latter is again a Lie group, called the special orthonormal group, and denoted by SO(3):
SO(3) = {R ∈ R
3×3
; R
−1
= R
T
, det R =1}.
Remark 3 Note that the previous rotations are all around a specific point in space, namely
the common origin of the coordinate systems. This implies that SO(3) can only be used
to describe rotations around a specific point and not any rotation! This is not explicitly
mentioned in most of the robotics literature.

剩余74页未读,继续阅读
2019-09-25 上传
108 浏览量
2023-05-27 上传
2023-05-26 上传
2023-06-10 上传
2023-06-08 上传
2023-06-02 上传
2023-12-14 上传
2023-06-01 上传
2023-05-27 上传

alss1923
- 粉丝: 22
- 资源: 66
 我的内容管理
展开
我的内容管理
展开







最新资源
- Lombok 快速入门与注解详解
- SpringSecurity实战:声明式安全控制框架解析
- XML基础教程:从数据传输到存储解析
- Matlab实现图像空间平移与镜像变换示例
- Python流程控制与运算符详解
- Python基础:类型转换与循环语句
- 辰科CD-6024-4控制器说明书:LED亮度调节与触发功能解析
- AE particular插件全面解析:英汉对照与关键参数
- Shell脚本实践:创建tar包、字符串累加与简易运算器
- TMS320F28335:浮点处理器与ADC详解
- 互联网基础与结构解析:从ARPANET到多层次ISP
- Redhat系统中构建与Windows共享的Samba服务器实战
- microPython编程指南:从入门到实践
- 数据结构实验:顺序构建并遍历链表
- NVIDIA TX2系统安装与恢复指南
- C语言实现贪吃蛇游戏基础代码
