卡尔曼滤波在Matlab中的实现:揭秘其强大算法
发布时间: 2024-06-08 14:46:34 阅读量: 112 订阅数: 70 
# 1. 卡尔曼滤波的理论基础
卡尔曼滤波是一种递归滤波算法,用于估计动态系统的状态。它由鲁道夫·卡尔曼在20世纪60年代提出,广泛应用于目标跟踪、状态估计和导航等领域。
卡尔曼滤波的基本原理是将系统状态表示为一个高斯分布,并通过预测和更新步骤不断更新该分布。预测步骤利用系统模型预测状态分布,而更新步骤则根据测量值修正状态分布。
卡尔曼滤波的优点在于它能够有效地处理噪声和不确定性,并提供状态的最佳估计。它还具有自适应性,能够随着系统和测量模型的变化而自动调整。
# 2. Matlab中卡尔曼滤波的实现
### 2.1 卡尔曼滤波算法的步骤
卡尔曼滤波算法是一个递归算法,由预测步骤和更新步骤组成。
#### 2.1.1 预测步骤
预测步骤用于根据先验估计和过程噪声更新状态和协方差。数学表达式如下:
```
x_priori = A * x_posteriori + B * u
P_priori = A * P_posteriori * A' + Q
```
其中:
- `x_priori`:预测状态
- `x_posteriori`:后验状态
- `A`:状态转移矩阵
- `B`:控制输入矩阵
- `u`:控制输入
- `P_priori`:预测协方差
- `P_posteriori`:后验协方差
- `Q`:过程噪声协方差矩阵
#### 2.1.2 更新步骤
更新步骤用于根据测量值和测量噪声更新状态和协方差。数学表达式如下:
```
K = P_priori * H' * inv(H * P_priori * H' + R)
x_posteriori = x_priori + K * (z - H * x_priori)
P_posteriori = (I - K * H) * P_priori
```
其中:
- `K`:卡尔曼增益
- `z`:测量值
- `H`:测量矩阵
- `R`:测量噪声协方差矩阵
### 2.2 Matlab中卡尔曼滤波函数的使用
Matlab提供了两个用于实现卡尔曼滤波的函数:`kalmanfilter` 函数和 `KalmanFilter` 类。
#### 2.2.1 kalmanfilter 函数
`kalmanfilter` 函数是一个单次运行的函数,用于执行卡尔曼滤波算法。其语法如下:
```
[x, P, K] = kalmanfilter(z, A, B, u, H, Q, R, x0, P0)
```
其中:
- `z`:测量值
- `A`:状态转移矩阵
- `B`:控制输入矩阵
- `u`:控制输入
- `H`:测量矩阵
- `Q`:过程噪声协方差矩阵
- `R`:测量噪声协方差矩阵
- `x0`:初始状态
- `P0`:初始协方差
#### 2.2.2 KalmanFilter 类
`KalmanFilter` 类是一个面向对象的方法,用于实现卡尔曼滤波算法。其语法如下:
```
kf = KalmanFilter(A, B, H, Q, R, x0, P0)
```
其中:
- `A`:状态转移矩阵
- `B`:控制输入矩阵
- `H`:测量矩阵
- `Q`:过程噪声协方差矩阵
- `R`:测量噪声协方差矩阵
- `x0`:初始状态
- `P0`:初始协方差
`KalmanFilter` 类提供了多种方法,用于执行卡尔曼滤波算法,包括:
- `predict`:执行预测步骤
- `update`:执行更新步骤
- `filter`:执行完整的卡尔曼滤波算法
### 2.3 卡尔曼滤波参数的优化
卡尔曼滤波算法的性能很大程度上取决于其参数的优化。两个关键参数是过程噪声协方差矩阵 `Q` 和测量噪声协方差矩阵 `R`。
#### 2.3.1 过程噪声协方差矩阵
过程噪声协方差矩阵 `Q` 表示模型对系统动力学的了解程度。它是一个对角矩阵,其对角线元素表示每个状态变量的噪声方差。
优化 `Q` 的一种方法是使用经验数据。通过观察系统的行为,可以估计每个状态变量的噪声水平。另一种方法是使用数值优化技术,例如最小二乘法或最大似然估计。
#### 2.3.2 测量噪声协方差矩阵
测量噪声协方差矩阵 `R` 表示传感器或测量设备的噪声水平。它也是一个对角矩阵,其对角线元素表示每个测量值的噪声方差。
优化 `R` 的方法与优化 `Q` 的方法类似。可以通过观察测量数据的噪声水平来估计每个测量值的噪声方差。也可以使用数值优化技术来优化 `R`。
# 3.1 目标跟踪
#### 3.1.1 常规目标跟踪
**卡尔曼滤波在常规目标跟踪中的应用**
卡尔曼滤波在常规目标跟踪中发挥着至关重要的作用。它通过预测目标的未来状态并更新其估计值来实现对目标的跟踪。该过程涉及以下步骤:
- **状态预测:**在预测步骤中,卡尔曼滤波器使用过程模型来预测目标在下一个时间步长处的状态。过程模型描述了目标运动的动力学,通常由速度和加速度等变量表示。
- **状态更新:**在更新步骤中,卡尔曼滤波器将来自传感器的测量值与预测的状态进行融合,以更新目标的估计值。测量值通常是目标位置或速度等观测数据。
**代码示例:**
```matlab
% 定义过程模型
A = [1 1; 0 1];
B = [0; 1];
% 定义测量模型
C = [1 0];
D = 0;
% 定义过程噪声协方差矩阵
Q = [0.1 0; 0 0.1];
% 定义测量噪声协方差矩阵
R = 0.1;
% 初始化卡尔曼滤波器
kf = kalmanfilter(A, B, C, D, Q, R);
% 模拟目标运动
true_states = [1; 0];
measurements = true_states + sqrt(R) * randn(1, 100);
% 跟踪目标
estimated_states = zeros(size(measurements));
for i = 1:length(measurements)
% 预测状态
kf.predict();
% 更新状态
kf.update(measurements(i));
% 存储估计状态
estimated_states(i, :) = kf.State;
end
% 绘制真实状态和估计状态
figure;
plot(true_states, 'b-', 'LineWidth', 2);
hold on;
plot(estimated_states, 'r--', 'LineWidth', 2);
legend('True States', 'Estimated States');
xlabel('Time');
ylabel('Position');
```
**逻辑分析:**
* `kalmanfilter` 函数用于初始化卡尔曼滤波器,其中指定了过程模型、测量模型、过程噪声协方差矩阵和测量噪声协方差矩阵。
* `predict` 方法用于预测目标的未来状态。
* `update` 方法用于更新目标的估计值,其中 `measurements(i)` 是第 `i` 个时间步长的测量值。
* `State` 属性用于获取卡尔曼滤波器的当前状态估计值。
#### 3.1.2 多目标跟踪
**卡尔曼滤波在多目标跟踪中的应用**
在多目标跟踪中,卡尔曼滤波器用于同时跟踪多个目标。它通过维护每个目标的单独状态估计值来实现这一点。多目标跟踪算法通常涉及以下步骤:
- **目标初始化:**首先,需要初始化每个目标的卡尔曼滤波器,并为其指定相应的过程模型和测量模型。
- **目标关联:**在每个时间步长,需要将测量值与目标关联起来。这通常通过数据关联算法来实现,例如最近邻算法或联合概率数据关联算法。
- **状态更新:**一旦测量值与目标关联,就可以使用卡尔曼滤波器更新每个目标的状态估计值。
**代码示例:**
```matlab
% 定义过程模型
A = [1 1; 0 1];
B = [0; 1];
% 定义测量模型
C = [1 0];
D = 0;
% 定义过程噪声协方差矩阵
Q = [0.1 0; 0 0.1];
% 定义测量噪声协方差矩阵
R = 0.1;
% 初始化卡尔曼滤波器
kf = cell(1, 2);
for i = 1:2
kf{i} = kalmanfilter(A, B, C, D, Q, R);
end
% 模拟目标运动
true_states = {[1; 0], [2; 0]};
measurements = cell(1, 2);
for i = 1:2
measurements{i} = true_states{i} + sqrt(R) * randn(1, 100);
end
% 跟踪目标
estimated_states = cell(1, 2);
for i = 1:length(measurements{1})
% 测量值关联
if i == 1
kf{1}.State = measurements{1}(i, :)';
kf{2}.State = measurements{2}(i, :)';
else
[idx1, idx2] = associateMeasurements([kf{1}.State, kf{2}.State], measurements{1}(i, :), measurements{2}(i, :));
if idx1 > 0
kf{1}.update(measurements{1}(i, :));
end
if idx2 > 0
kf{2}.update(measurements{2}(i, :));
end
end
% 存储估计状态
estimated_states{1}(i, :) = kf{1}.State';
estimated_states{2}(i, :) = kf{2}.State';
end
% 绘制真实状态和估计状态
figure;
for i = 1:2
subplot(2, 1, i);
plot(true_states{i}(:, 1), 'b-', 'LineWidth', 2);
hold on;
plot(estimated_states{i}(:, 1), 'r--', 'LineWidth', 2);
legend('True States', 'Estimated States');
xlabel('Time');
ylabel('Position');
end
```
**逻辑分析:**
* `associateMeasurements` 函数用于将测量值与目标关联。
* `update` 方法用于更新每个目标的状态估计值。
* `State` 属性用于获取每个卡尔曼滤波器的当前状态估计值。
# 4. 卡尔曼滤波的扩展和改进
### 4.1 扩展卡尔曼滤波
#### 4.1.1 非线性系统的处理
标准卡尔曼滤波适用于线性系统,而扩展卡尔曼滤波(EKF)扩展了其适用范围,使其能够处理非线性系统。在非线性系统中,状态转移方程和测量方程都是非线性的。
EKF通过对非线性方程进行一阶泰勒展开来近似线性化。具体来说,在预测步骤中,状态转移方程被线性化为雅可比矩阵:
```
F = ∂f(x, u) / ∂x
```
其中,f(x, u) 是非线性状态转移方程,x 是状态向量,u 是控制输入。
在更新步骤中,测量方程被线性化为雅可比矩阵:
```
H = ∂h(x) / ∂x
```
其中,h(x) 是非线性测量方程。
#### 4.1.2 扩展卡尔曼滤波的步骤
EKF的步骤与标准卡尔曼滤波类似,但包含了线性化步骤:
1. **预测步骤**
- 计算状态预测值:`x_pred = f(x, u)`
- 计算预测协方差:`P_pred = F * P * F' + Q`
2. **线性化步骤**
- 计算状态转移方程的雅可比矩阵:`F = ∂f(x, u) / ∂x`
- 计算测量方程的雅可比矩阵:`H = ∂h(x) / ∂x`
3. **更新步骤**
- 计算卡尔曼增益:`K = P_pred * H' * (H * P_pred * H' + R)^-1`
- 更新状态估计值:`x = x_pred + K * (z - h(x_pred))`
- 更新协方差:`P = (I - K * H) * P_pred`
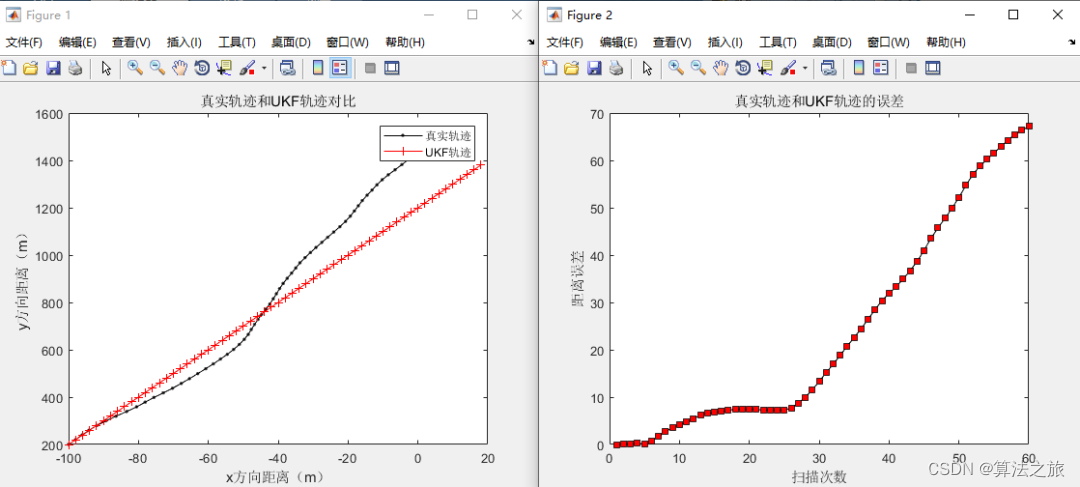
### 4.2 无迹卡尔曼滤波
#### 4.2.1 无迹卡尔曼滤波的原理
无迹卡尔曼滤波(UKF)是一种卡尔曼滤波的改进算法,它通过使用无迹变换来避免EKF中线性化带来的误差。无迹变换是一种确定性采样方法,它可以近似计算非线性方程的期望值和协方差。
在UKF中,状态向量和协方差矩阵被一组称为西格玛点的样本点近似。这些西格玛点通过无迹变换从原始分布中生成。
#### 4.2.2 无迹卡尔曼滤波的优势
UKF相对于EKF具有以下优势:
- **更高的精度:**UKF通过使用无迹变换来避免线性化误差,因此具有更高的精度。
- **更快的收敛速度:**UKF通常比EKF收敛得更快,因为它不需要计算雅可比矩阵。
- **更鲁棒:**UKF对非线性系统的鲁棒性更强,因为它可以处理更广泛的非线性度。
# 5.1 粒子滤波
### 5.1.1 粒子滤波的原理
粒子滤波是一种蒙特卡洛方法,用于估计非线性、非高斯系统中的状态。它通过维护一组称为粒子的状态样本,并根据观测值对这些粒子进行加权和重采样,来近似后验概率分布。
### 5.1.2 粒子滤波在Matlab中的实现
Matlab中可以使用 `particleFilter` 函数实现粒子滤波。该函数需要以下参数:
- `stateTransitionModel`: 状态转移模型,描述系统状态如何随着时间变化。
- `measurementModel`: 测量模型,描述观测值如何与系统状态相关。
- `initialParticles`: 粒子集的初始分布。
- `numParticles`: 粒子的数量。
- `resamplingStrategy`: 重采样策略,用于选择要保留的粒子。
```
% 定义状态转移模型
stateTransitionModel = @(x) x + 0.5 * randn(1);
% 定义测量模型
measurementModel = @(x) x + 0.1 * randn(1);
% 创建粒子滤波器对象
pf = particleFilter(stateTransitionModel, measurementModel, 100, 0.1, 'systematic');
% 初始化粒子集
particles = randn(100, 1);
% 运行粒子滤波
for i = 1:100
% 获取观测值
y = measurementModel(particles(i));
% 更新粒子权重
pf.update(particles, y);
% 重采样粒子
particles = pf.resample();
end
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入剖析了卡尔曼滤波,一种强大的算法,广泛应用于各种领域。从原理、应用到 MATLAB 实战案例,专栏全面阐述了卡尔曼滤波的方方面面。此外,还探讨了卡尔曼滤波的局限性,与其他滤波算法的对比,以及代码优化技巧。专栏还重点介绍了卡尔曼滤波在机器人导航、传感器融合、计算机视觉、时序分析、金融建模、控制系统、信号处理、医疗诊断、工业自动化、交通管理、环境监测、国防安全和科学研究等领域的应用。通过深入的分析和丰富的案例,本专栏为读者提供了全面了解和应用卡尔曼滤波的宝贵资源。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【中断管理与优先级配置】:STM32F103中断系统的深度剖析
# 摘要
STM32F103微控制器的中断系统是实现高效、实时响应外部事件的关键技术。本文全面概述了中断系统的结构和工作原理,详述了中断优先级的配置、嵌套和抢占机制,以及在不同应用中进行中断优先级配置实践的案例分析。此外,本文提供了中断系统调试、故障排除和高级中断管理技术的相关知识,深入探讨了中断优先级分组、外部中断配置和实时系统中断优化等内容。最后,本
不对称故障处理速成课:电力工程师必备的分析与应对策略

# 摘要
不对称故障处理是确保电力系统稳定运行的关键,本文首先概述了不对称故障的基本概念和分类,随后深入分析了其对电力设备和系统稳定性的影响。通过对故障理论计算方法的探讨,包括基础理论公式和复数对称分量法的应用,文章提供了理论基础。此外,本文重点介绍了故障检测技术,包括信号处理和传感器技术的理论基础与应用,以及故障诊断软件与算法的实际案例。在应对策略
【RPC8211FS驱动开发实战】:打造高效驱动框架的技巧
# 摘要
本文系统地介绍了RPC8211FS驱动的开发,涵盖架构理论基础、开发实践、高级应用、调试以及安全机制。首先,文章概述了RPC8211FS驱动的架构设计原则和核心组件功能,随后详细分析了其通信机制和内存管理策略。在开发实践部分,本文指导如何搭建开发环境、实现核心功能,以及对驱动性能进行优化评估。文章进一步探讨了并发控制、异常处理、日志系统以及自动化测试等高级应用,并分析了驱动的安全策略、测试与防护措施。最后,本文展望了驱动
航空网络安全的顶层设计:保护Sabre系统的关键措施
# 摘要
本文首先概述了航空网络安全的重要性及其在现代航空业中的作用,分析了针对航空网络的各类攻击类型,并强调了进行网络安全风险评估的必要性。接着,文章深入探讨了Sabre系统架构,包括其功能组成及关键业务逻辑,进而分析了系统的安全需求,特别关注了敏感数据保护和系统三大安全属性。第三章提出了航空网络安全的理论基础,涵盖网络安全策略和框架的制定,以及风险管理与安全评估方法。第四章结合Sab
【PLC编程实践】:从入门到精通,成为自动化领域的专家
# 摘要
本文提供了对可编程逻辑控制器(PLC)编程的全面综述,从基础概念到高级应用,再到自动化和未来趋势。首先,文章介绍了PLC编程的基础知识和硬件软件架构,然后深入探讨了PLC编程语言、逻辑设计和应用实践。在此基础上,文章进一步阐述了高级编程技巧,包括结构化文本编程和顺序功能图的应用。在实践应用章节中,文章结合工业控制系统搭建和常见工业控制项目
【MS建模案例全解析】:揭秘结构建模在真实世界中的10大应用

# 摘要
结构建模作为理解和预测复杂系统行为的重要工具,在建筑、工程、产品开发和可持续发展中扮演着关键角色
【Groops安装实战】:一步到位掌握Groops服务器部署到性能优化
# 摘要
本文全面介绍Groops的安装、配置、优化和监控过程,旨在为系统管理员和技术开发者提供一个完整的部署和管理指南
一致性协议深度解析:分布式数据库稳定性与可靠性提升秘籍
# 摘要
本文详细探讨了一致性协议的设计原理、挑战以及在分布式系统中的应用实践。首先介绍了Paxos算法的基本原理、设计目标和实践中的常见问题及其解决方案,然后以易懂的方式阐述了Raft算法的设计理念和运行流程,并探讨了它在现代分布式数据库中的应用。接着,分析了多版本一致性协议(MVCC)的原理、优势以及在分布
【逆变器效率提升】:PIC单片机程序优化的10大黄金法则
# 摘要
随着可再生能源技术的发展,逆变器作为将直流电转换为交流电的关键设备,其效率直接关系到系统性能。本文首先概述了逆变器效率提升与PIC单片机的基本概念,随后深入分析了影响逆变器效率的因素及PIC单片机的工作原理和接口技术。接着,文章详细探讨了PIC单片机程序优化的黄金法则,包括代码优化、算法和数据结构选择、调试与性能分析等。进一步地,本文通过
【速达3000Pro数据库索引优化技巧】:索引选择与维护的最佳实践
# 摘要
本文全面探讨了数据库索引的理论基础、选择技巧、维护策略、高级优化技术,以及实战演练。首先介绍了索引的基础理论,并提供了索引选择的实用技巧,包括理解不同索引类型和设计原则。接着,探讨了索引的维护策略,强调了常规维护任务、监控分析工具的使用以及自动化维护的实践。高级技巧章节着重于动态索引管理、非传统索引的应用和复杂查询下的索引优化。案例研究与问题解决章节通过
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )