卡尔曼滤波MATLAB代码优化秘籍:提升算法性能,事半功倍
发布时间: 2024-04-26 23:30:37 阅读量: 22 订阅数: 34 
# 1. 卡尔曼滤波的理论基础
卡尔曼滤波是一种递归滤波算法,用于估计不可直接观测的动态系统的状态。它由鲁道夫·卡尔曼于1960年提出,广泛应用于导航、控制、信号处理等领域。
卡尔曼滤波的基本原理是将系统状态表示为一个状态向量,并通过一个状态转移模型和一个观测模型来预测和更新状态。状态转移模型描述了系统状态随时间的演变,而观测模型描述了观测值与系统状态之间的关系。卡尔曼滤波使用贝叶斯估计理论,在每个时间步长对状态向量进行预测和更新,以获得系统状态的最佳估计。
# 2. MATLAB中卡尔曼滤波的实现
### 2.1 卡尔曼滤波算法的MATLAB实现
#### 卡尔曼滤波模型
卡尔曼滤波是一个递归算法,它使用状态空间模型来估计动态系统的状态。状态空间模型由以下方程组成:
```
x[k] = Ax[k-1] + Bu[k] + w[k]
y[k] = Cx[k] + Du[k] + v[k]
```
其中:
* x[k] 是系统状态向量
* u[k] 是系统输入向量
* y[k] 是系统输出向量
* A、B、C、D 是状态空间模型的系统矩阵
* w[k] 和 v[k] 是过程噪声和测量噪声,它们通常被建模为均值为 0 的高斯白噪声
#### 卡尔曼滤波算法
卡尔曼滤波算法由以下步骤组成:
1. **预测:**
- 计算先验状态估计:x[k|k-1] = Ax[k-1|k-1] + Bu[k]
- 计算先验状态协方差:P[k|k-1] = AP[k-1|k-1]A^T + Q
2. **更新:**
- 计算卡尔曼增益:K[k] = P[k|k-1]C^T(CP[k|k-1]C^T + R)^-1
- 更新状态估计:x[k|k] = x[k|k-1] + K[k](y[k] - Cx[k|k-1])
- 更新状态协方差:P[k|k] = (I - K[k]C)P[k|k-1]
其中:
* Q 是过程噪声协方差矩阵
* R 是测量噪声协方差矩阵
* I 是单位矩阵
#### MATLAB实现
以下 MATLAB 代码实现了卡尔曼滤波算法:
```matlab
% 系统矩阵
A = [1 1; 0 1];
B = [0; 1];
C = [1 0];
D = 0;
% 噪声协方差矩阵
Q = diag([0.001, 0.001]);
R = 0.01;
% 初始状态和协方差
x0 = [0; 0];
P0 = diag([0.1, 0.1]);
% 观测数据
y = [1; 2; 3; 4; 5];
% 卡尔曼滤波
x_est = zeros(size(y, 1), size(x0, 1));
P_est = zeros(size(y, 1), size(P0, 1), size(P0, 2));
x_est(1, :) = x0;
P_est(1, :, :) = P0;
for k = 2:size(y, 1)
% 预测
x_pred = A * x_est(k-1, :)' + B * u(k);
P_pred = A * P_est(k-1, :, :) * A' + Q;
% 更新
K = P_pred * C' * inv(C * P_pred * C' + R);
x_est(k, :) = x_pred + K * (y(k) - C * x_pred);
P_est(k, :, :) = (eye(size(P_pred)) - K * C) * P_pred;
end
```
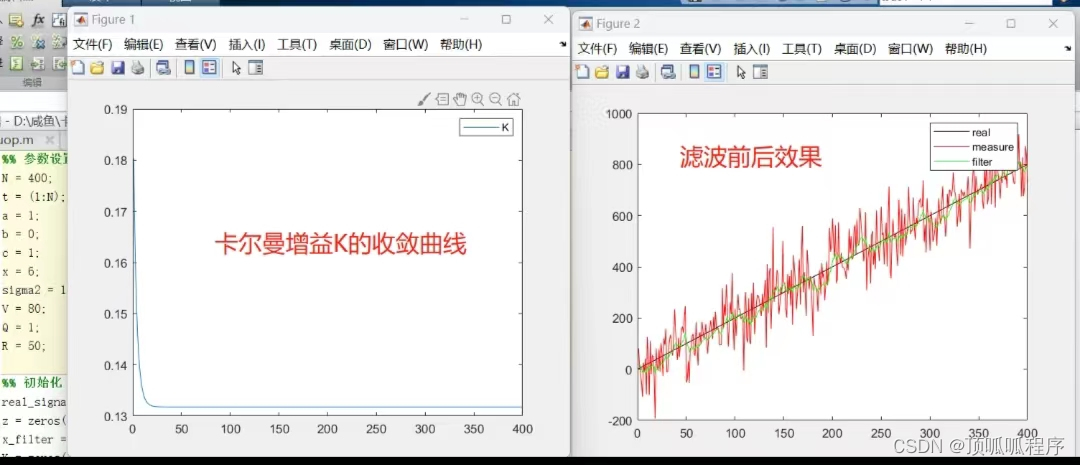
### 2.2 卡尔曼滤波参数的优化
卡尔曼滤波算法的性能取决于其参数,包括过程噪声协方差矩阵 Q 和测量噪声协方差矩阵 R。这些参数通常需要通过经验或试错来确定。
#### 优化方法
有几种方法可以优化卡尔曼滤波参数:
* **网格搜索:**在参数空间中尝试一系列值,并选择产生最佳性能的值。
* **梯度下降:**使用梯度下降算法来找到参数空间中的局部最优解。
* **贝叶斯优化:**使用贝叶斯优化算法来找到参数空间中的全局最优解。
#### MATLAB实现
以下 MATLAB 代码使用网格搜索来优化卡尔曼滤波参数:
```matlab
% 参数网格
Q_grid = logspace(-4, -1, 10);
R_grid = logspace(-2, 0, 10);
% 性能指标
performance = zeros(length(Q_grid), length(R_grid));
for i = 1:length(Q_grid)
for j = 1:length(R_grid)
% 设置参数
Q = diag([Q_grid(i), Q_grid(i)]);
R = R_grid(j);
% 运行卡尔曼滤波
x_est = zeros(size(y, 1), size(x0, 1));
P_est = zeros(size(y, 1), size(P0, 1), size(P0, 2));
x_est(1, :) = x0;
P_est(1, :, :) = P0;
for k = 2:size(y, 1)
% 预测
x_pred = A * x_est(k-1, :)' + B * u(k);
P_pred = A * P_est(k-1, :, :) * A' + Q;
% 更新
K = P_pred * C' * inv(C * P_pred * C' + R);
x_est(k, :) = x_pred + K * (y(k) - C * x_pred);
P_est(k, :, :) = (eye(size(P_pred)) - K *
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 赠618次下载
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到“卡尔曼滤波 MATLAB 代码实践”专栏!本专栏旨在通过深入浅出的讲解和丰富的代码示例,带领您从零基础掌握卡尔曼滤波算法的设计和应用。
从揭秘代码秘诀到优化性能技巧,再到解决实际问题和调试常见错误,我们将逐步探索卡尔曼滤波的方方面面。通过深入分析算法瓶颈和扩展指南,您将获得提升算法效率和探索高级应用的宝贵知识。
本专栏还提供了卡尔曼滤波 MATLAB 代码在各个领域的应用案例研究,包括工业控制、机器人导航、金融预测、医学诊断和图像处理。这些案例将激发您的创新思维,帮助您将卡尔曼滤波技术应用到实际问题中。
无论您是算法新手还是经验丰富的工程师,本专栏都将为您提供全面的指南,让您快速掌握卡尔曼滤波算法,并将其应用到各种实际应用中。
专栏目录
最低0.47元/天 解锁专栏
赠618次下载
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Python版本生态系统:不同版本下的生态系统差异,选择适合的工具
# 1. Python版本生态系统概述**
Python是一个多版本语言,拥有丰富的版本生态系统。不同版本的Python在核心语言特性、标准库和生态系统支持方面存在差异。了解P
Python3 Windows系统安装与云计算:云平台部署与管理,弹性扩展,无限可能
# 1. Python 3 在 Windows 系统上的安装**
Python 3 是 Windows 系统上广泛使用的编程语言,安装过程简单快捷。
1. **下载 Python 3 安装程序:**
- 访问 Python 官方网站(https://www.python.org/downloads/),下载适用于 Windows 的 Pyt
iPython和Python在生物信息学中的应用:挖掘交互式生物数据分析的价值
# 1. iPython和Python在生物信息学中的概述
iPython和Python在生物信息学领域扮演着至关重要的角色。iPython是一个交互式环境,提供了一个方便的平台来探索、分析和可视化生物数据。Python是一种强大的编程语言,拥有丰富的生物信息学工具包,使研究人员能够高效地处理和分析复杂的数据集。
本章将概述iPython和Pytho
Python自动化测试:构建可靠、高效的自动化测试框架,保障代码质量

# 1. Python自动化测试简介**
Python自动化测试是一种利用Python编程语言自动执行软件测试过程的技术。它通过编写测试脚本来模拟用户操作,验证应用程序的行为并检测错误。自动化测试可以提高测试效率、减少人为错误并确保应用程序的质量和可靠性。
Python自动化测试框架为组织和管理测试用例提供了结构,使测试过程更加高效和可维护。这些框架通常包括测试用例设计、执行、报告和维
从测试数据中挖掘价值:Selenium自动化测试与数据分析

# 1. Selenium自动化测试简介**
Selenium自动化测试是一种使用Selenium Web驱动程序在Web应用程序上执行自动化测试的方法。它允许测试人员模拟用户交互,例如点击按钮、输入文本和验证结果,以提高测试效率和可靠性。Selenium支持多种编程语言,包括Java、Python和C#,并提供了一系列工具和库来简化测试脚本的编写和执行。
Selenium自动化测试的好处包括:
Python中format的格式化序列:揭秘10个技巧,灵活格式化序列,提升代码效率

# 1. Python中format()函数概述
Python中的`format()`函数是一种强大的工具,用于格式化字符串,使其更具可读性。它通过将占位符替换为给定的值来工作,从而允许您动态地构建字符串。`format()`函数使用格式化序列来指定如何格式化值,为字符串格式化提供了高
Python操作MySQL数据库的性能调优:从慢查询到高速响应,数据库提速秘籍
# 1. MySQL数据库性能调优概述**
MySQL数据库性能调优是指通过优化数据库配置、查询语句和架构设计,提升数据库的执行效率和响应速度。
**调优目标:**
* 降低查询延迟,提高数据库响应速度
* 优化资源利用率,减少服务器负载
* 确保数据一致性和完整性
**调优原则:**
* 遵循“80/20”法则,关注对性能影响最大的因素
*
Sklearn文本挖掘实战:从文本数据中挖掘价值,掌握文本挖掘技术

# 1. 文本挖掘基础**
文本挖掘是一门从文本数据中提取有价值信息的学科。它涉及广泛的技术,包括文本预处理、特征提取、分类和聚类。
文本挖掘的基础是理解
PyCharm Python版本设置:从新手到专家,全方位提升开发技能,打造高效开发环境

# 1. PyCharm Python版本设置基础**
PyCharm 是一款功能强大的 Python 开发环境,它允许您轻松管理和配置 Python 版本。本章将介绍 PyCharm 中 Python 版本设置的基础知识,包括:
- **Python 解释器的概念:** 了解 Python 解释器在 PyCharm 中的作用,以及如何创建
避免Python并发编程的10大陷阱:多线程与多进程的常见问题与解决方案
# 1. Python并发编程概述
并发编程是一种编程范式,它允许一个程序同时执行多个任务。在Python中,并发编程可以通过多线程或多进程来实现。多线程是在同一进程中创建多个线程,而多进程是在不同的进程中创建多个进程。
并发编程的主要优点是它可以提高程序的性能和响应能力。通过同时执行多个任务,程序可以更有效地利用计算机的资源。此外,并发编程还可以使程序更容
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
赠618次下载
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )