【图算法深度剖析】:Python高效图数据结构实战指南
发布时间: 2024-09-11 17:13:21 阅读量: 385 订阅数: 73 

基于freeRTOS和STM32F103x的手机远程控制浴室温度系统设计源码
# 1. 图算法与数据结构基础
图算法是计算机科学中处理网络和树形结构的重要工具。在这一章,我们将从基础开始,逐步揭开图算法的神秘面纱,为读者构建起坚实的理论基础。
## 图的定义与表示
图由一组顶点(Vertices)和一组连接这些顶点的边(Edges)组成。在计算机科学中,图可以被用来表示很多东西,比如社交网络、交通路线、互联网、蛋白质相互作用网络等。图可以被分为两大类:有向图(边具有方向性)和无向图(边不具有方向性)。图的表示方法有多种,主要包括邻接矩阵和邻接表。
## 图数据结构的重要性
图数据结构在很多实际应用中扮演着关键角色。例如,在社交网络分析中,用户和他们之间的朋友关系可以被表示为图;在路径规划系统中,城市和道路可以被构建为图来找到最短路径。
为了有效地处理图数据,必须了解其数据结构和相关算法。在后续章节中,我们将详细探讨如何在Python中实现图数据结构,学习如何进行图的遍历、搜索最短路径以及如何处理图的高级特性。
图算法的学习对于任何想要深入了解数据结构和算法的IT从业者都是必不可少的,因为它们在解决复杂问题时具有巨大的实用价值。让我们开始我们的图算法之旅吧!
# 2. Python中的图数据结构实现
在前一章节中,我们探讨了图算法与数据结构的基础理论,了解了图的定义、分类以及它们在解决实际问题中的重要性。本章将深入探讨如何在Python中实现图的数据结构,以及如何操作这些结构以执行基本的图算法。
## 2.1 图的内部表示方法
实现图数据结构首先需要决定使用何种内部表示方法。在Python中,常见的两种实现方式是邻接矩阵和邻接表。每种方法都有其特点和适用场景。
### 2.1.1 邻接矩阵的实现与特点
**邻接矩阵表示法**是一种用二维数组来表示图的方法,其中数组的索引对应于图中的顶点,矩阵中的值表示顶点间的连接关系。无连接关系的顶点,对应矩阵值为0,有直接连接的顶点对应矩阵值为1(或者表示边的权重,如果图是加权的)。
以下是一个简单的邻接矩阵实现的代码示例:
```python
class Graph:
def __init__(self, vertices):
self.V = vertices
self.graph = [[0 for column in range(vertices)]
for row in range(vertices)]
def print_graph(self):
for i in range(self.V):
for j in range(self.V):
print(self.graph[i][j], end=" ")
print()
```
该代码段定义了一个`Graph`类,用于创建一个包含`vertices`个顶点的图,并初始化一个`VxV`大小的邻接矩阵,所有元素默认为0。`print_graph`方法用于打印图的邻接矩阵。
邻接矩阵的优势在于其直观性:可以轻易地通过索引访问任意顶点对的关系,并且矩阵对称性可以直观地表示无向图。然而,邻接矩阵的空间复杂度为`O(V^2)`,这对于顶点数较多的稀疏图来说是一种空间浪费。
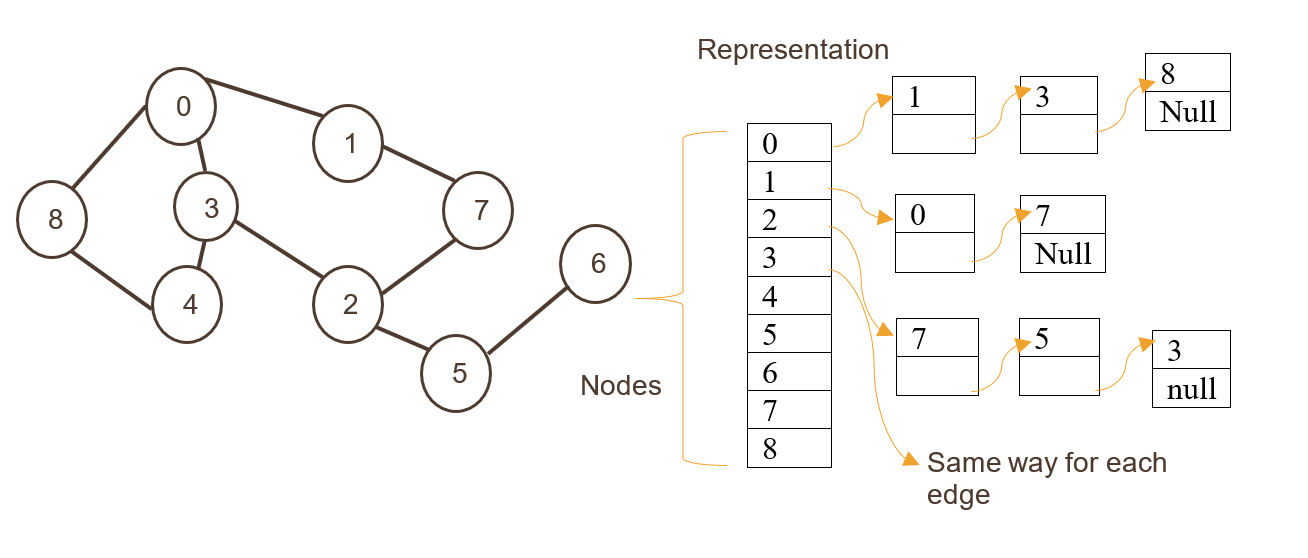
### 2.1.2 邻接表的实现与特点
**邻接表表示法**是一种更为节省空间的表示方法,特别是对于稀疏图而言。它使用链表、数组或其他数据结构来存储顶点间的连接关系。
以下是使用Python字典来表示邻接表的代码示例:
```python
class Graph:
def __init__(self, vertices):
self.V = vertices
self.graph = [[] for i in range(vertices)]
def add_edge(self, src, dest):
self.graph[src].append(dest)
def print_graph(self):
for i in range(self.V):
print(f"Adjacency list of vertex {i}: {self.graph[i]}")
```
该代码段定义了一个`Graph`类,通过使用列表的列表来存储图。每个顶点的邻接顶点都存储在对应顶点的列表中。
邻接表相较于邻接矩阵更加节省空间,并且能够有效地表示稀疏图。然而,邻接表需要更多的代码来处理查找顶点关系的操作,因此在操作速度上可能会慢于邻接矩阵。
## 2.2 图的基本操作
图的基本操作包括添加边与顶点,以及实现图的遍历算法和最短路径算法。
### 2.2.1 添加边与顶点
添加边和顶点是图操作的基础。在邻接矩阵和邻接表中,添加边的操作略有不同:
```python
def add_edge(self, src, dest):
self.graph[src].append(dest) # 邻接表添加边
def add_edge(self, src, dest):
self.graph[src][dest] = 1 # 邻接矩阵添加边
# 若为有向图,还需要添加下面这行代码:
# self.graph[dest][src] = 1
```
在邻接表中,简单地将`dest`添加到`src`的邻接链表中。而在邻接矩阵中,需要将对应位置置为1表示存在一条边。
### 2.2.2 图的遍历算法(DFS与BFS)
图的遍历算法是许多图算法的基础,包括深度优先搜索(DFS)和广度优先搜索(BFS)。这里使用递归实现DFS:
```python
def DFSUtil(self, v, visited):
visited[v] = True
print(v, end=" ")
for i in self.graph[v]:
if not visited[i]:
self.DFSUtil(i, visited)
def DFS(self, v):
visited = [False] * self.V
self.DFSUtil(v, visited)
```
BFS算法实现:
```python
from collections import deque
def BFS(self, s):
visited = [False] * self.V
queue = deque()
queue.append(s)
while queue:
s = queue.popleft()
if not visited[s]:
print(s, end=" ")
visited[s] = True
for i in self.graph[s]:
if not visited[i]:
queue.append(i)
```
### 2.2.3 最短路径算法(Dijkstra与Floyd-Warshall)
Dijkstra算法可以找到一个顶点到其他所有顶点的最短路径:
```python
import sys
def min_distance(self, dist, sptSet):
min = sys.maxsize
for v in range(self.V):
if dist[v] < min and sptSet[v] == False:
min = dist[v]
min_index = v
return min_index
def Dijkstra(self, src):
dist = [sys.maxsize] * self.V
dist[src] = 0
sptSet = [False] * self.V
for cout in range(self.V):
u = self.min_distance(dist, sptSet)
sptSet[u] = True
for v in self.graph[u]:
if not sptSet[v] and dist[v] > dist[u] + 1:
dist[v] = dist[u] + 1
self.print_solution(dist)
Floyd-Warshall算法可以找到图中所有顶点对之间的最短路径:
```python
def floyd_warshall(self):
dist = list(map(lambda i: list(map(lambda j: j, i)), self.graph))
for k in range(self.V):
for i in range(self.V):
for j in range(self.V):
dist[i][j] = min(dist[i][j], dist[i][k] + dist[k][j])
self.print_solution(dist)
```
这些算法是图算法中的基石,它们能帮助我们解决从路由到网络设计等多方面的问题。
## 2.3 图的高级特性
深入了解图的高级特性,能够帮助我们更好地理解和应用图算法来解决更复杂的问题。
### 2.3.1 加权图与非加权图的区别
加权图的边具有权重,而非加权图的边没有权重。在加权图中,边的权重通常用于表示成本、距离或时间等属性。因此,很多图算法在非加权图中可以简化处理,而在加权图中需要更复杂的计算。
### 2.3.2 有向图与无向图的处理
有向图的边具有方向性,表示为有序对,如`(u, v)`;无向图的边没有方向性,表示为无序对,如`(u, v)`或`(v, u)`。这决定了很多图算法在处理有向图和无向图时需要采取不同的策略。
### 2.3.3 连通分量与强/弱连通性分析
连通分量是无向图中极大连通子图,在有向图中区分为强连通分量和弱连通分量。强连通分量中的任意两个顶点都互相可达,而弱连通分量在忽略边的方向后仍然连通。
以下是一个简单的强连通分量的检测算法代码实现(Kosaraju算法):
```python
def SCCUtil(self, v, stack, visited):
visited[v] = True
for i in self.graph[v]:
if not visited[i]:
self.SCCUtil(i, stack, visited)
def fillOrder(self, v, visited, stack):
visited[v] = True
for i in self.graph[v]:
if not visited[i]:
self.fillOrder(i, visited, stack)
stack.insert(0, v)
def SCC(self):
stack = []
visited = [False] * (self.V)
for i in range(self.V):
if not visited[i]:
self.fillOrder(i, visited, stack)
newGraph = Graph(self.V)
for i in range(self.V):
newGraph.graph[i] = []
for j in self.graph[i]:
newGraph.graph[i].append(j)
visited = [False] * self.V
while stack:
v = stack.pop()
if not visited[v]:
self.SCCUtil(v, newGraph.graph, visited)
print("")
```
检测强连通分量有助于理解图的结构,例如用于网页排名或社交网络分析。
在下一章节中,我们将探讨图算法在解决实际问题中遇到的常见问题与解决方案,包括网络流问题、拓扑排序与关键路径,以及匹配与覆盖问题。
# 3. 图算法的常见问题与解决方案
## 3.1 网络流问题
网络流问题是一类在有向图中寻找最大流或最小割的优化问题,广泛应用于资源分配、交通网络、电路设计等领域。在这一节中,我们将深入探讨两种经典的算法:Ford-Fulkerson算法与Edmonds-Karp算法,以及解决最小割问题的策略。
### 3.1.1 最大流问题的经典算法(Ford-Fulkerson与Edmonds-Karp)
最大流问题的核心在于找到从源点到汇点的最大流量。Ford-Fulkerson方法通过不断寻找增广路径来增加流的总量,直到无法找到增广路径为止。这种方法的直观性使其成为解决最大流问题的经典方法,但它的时间复杂度较高,对于某些特殊的图结构,其性能甚至可能退化到指数级。
下面是一个用Python实现的Ford-Fulkerson算法示例代码,其中使用了一个辅助函数`bfs`来检查是否存在增广路径:
```python
from collections import deque
def bfs(rGraph, s, t, parent):
visited = [False] * len(rGraph)
queue = deque()
queue.append(s)
visited[s] = True
while queue:
u = queue.popleft()
for ind, val in enumerate(rGraph[u]):
if visited[ind] == False and val > 0:
queue.append(ind)
visited[ind] = True
parent[ind] = u
return visited[t]
def fordFulkerson(graph, source, sink):
rGraph = [row[:] for row in graph]
parent = [-1] * len(graph)
max_flow = 0
while bfs(rGraph, source, sink, parent):
path_flow = float('inf')
s = sink
while s != source:
path_flow = min(path_flow, rGraph[parent[s]][s])
s = parent[s]
max_flow += path_flow
v = sink
while v != source:
u = parent[v]
rGraph[u][v] -= path_flow
rGraph[v][u] += path_flow
v = parent[u]
return max_flow
# 示例图
graph = [
[0, 16, 13, 0, 0, 0],
[0, 0, 10, 12, 0, 0],
[0, 4, 0, 0, 14, 0],
[0, 0, 9, 0, 0, 20],
[0, 0, 0, 7, 0, 4],
[0, 0, 0, 0, 0, 0]
]
source = 0
sink = 5
print("The maximum possible flow is %d " % fordFulkerson(graph, source, sink))
```
代码中定义了一个辅助函数`bfs`来找到增广路径,如果找不到增广路径,`bfs`将返回`False`,并且`fordFulkerson`函数将停止执行,并返回当前的最大流量。
### 3.1.2 最小割问题的解决方案
最小割问题求解的是在图中找到一组边,移除这些边后,原图的连通性被破坏,且总的边权值最小。对于最小割问题,Edmonds-Karp算法是Ford-Fulkerson算法的一个变种,其改进之处在于使用广度优先搜索(BFS)来寻找增广路径,从而保证了多项式时间复杂度。
Edmonds-Karp算法的核心在于它通过BFS确保了每个增广路径上边的数量是递增的,从而避免了某些图中会出现的循环搜索。它的时间复杂度为O(V*E^2),其中V是顶点数,E是边数,适用于较为密集的图。
## 3.2 拓扑排序与关键路径
### 3.2.1 拓扑排序的实现
拓扑排序是针对有向无环图(DAG)的一种排序方式,它将图中的顶点线性排序,使得对于每一条有向边(u, v),顶点u在排序中都出现在v之前。拓扑排序在项目管理和任务调度中非常有用,因为它可以帮助确定任务的执行顺序。
以下是使用Python实现拓扑排序的示例代码:
```python
from collections import defaultdict, deque
class Graph:
def __init__(self, vertices):
self.graph = defaultdict(list) # dictionary containing adjacency List
self.V = vertices
def addEdge(self, u, v):
self.graph[u].append(v)
def topologicalSort(self):
in_degree = [0] * self.V
for i in self.graph:
for j in self.graph[i]:
in_degree[j] += 1
queue = deque()
for i in range(self.V):
if in_degree[i] == 0:
queue.append(i)
count = 0
top_order = []
while queue:
u = queue.popleft()
top_order.append(u)
for i in self.graph[u]:
in_degree[i] -= 1
if in_degree[i] == 0:
queue.append(i)
count += 1
if count != self.V:
print("There exists a cycle in the graph")
else:
print("Topological Sort of the given graph:")
print(top_order)
# 创建图实例并添加边
g = Graph(6)
g.addEdge(5, 2)
g.addEdge(5, 0)
g.addEdge(4, 0)
g.addEdge(4, 1)
g.addEdge(2, 3)
g.addEdge(3, 1)
print("Following is a Topological Sort of the given graph:")
***ologicalSort()
```
### 3.2.2 关键路径算法与项目管理
关键路径法(CPM)是一种项目管理技术,用于计划和调度项目活动。关键路径是从项目开始到结束的最长路径,确定了项目的最短完成时间,同时,任何关键路径上的延迟都将直接影响整个项目的完成时间。
关键路径算法的主要步骤包括:
1. 确定所有活动及其持续时间。
2. 根据活动的依赖关系绘制网络图。
3. 计算每个活动的最早开始时间(ES)和最晚开始时间(LS)。
4. 确定所有路径的长度。
5. 确定关键路径。
关键路径的计算可以使用拓扑排序的逻辑,并结合每个活动的最早开始时间和最晚开始时间来确定。项目管理者根据关键路径来监控项目进展,并对关键活动优先分配资源和关注,以确保项目按时完成。
## 3.3 匹配与覆盖
### 3.3.1 二分图的最大匹配(Kuhn-Munkres算法)
在图论中,二分图匹配问题是指在一个二分图中找出最大数量的不相交的边的集合。Kuhn-Munkres算法,也称作KM算法或匈牙利算法,是一个在多项式时间内解决二分图最大匹配问题的经典算法。
KM算法主要步骤如下:
1. 将二分图的每个未匹配顶点覆盖,使所有顶点均被覆盖。
2. 在被覆盖顶点中选择一个未匹配的顶点u,寻找一条增广路径,从u开始,交替使用边和边覆盖。
3. 如果找到增广路径,那么用这条路径上的边替换原匹配中的边,更新匹配和覆盖。
4. 重复上述步骤,直到找不到增广路径为止。
KM算法的关键在于寻找增广路径的过程,这个过程通常使用深度优先搜索(DFS)来完成。
### 3.3.2 独立集、覆盖与着色问题
独立集、覆盖和着色问题都是图论中经典的优化问题。独立集是指在一个图中,没有任何两个顶点之间有边相连的顶点集合。覆盖是指一组顶点,使得图中的每个顶点都至少与覆盖中的一个顶点相邻。图着色问题是指用最少的颜色为图中的顶点进行着色,使得没有两个相邻顶点颜色相同。
这些问题之间存在密切的联系,并且它们在各种实际问题中有着广泛的应用,例如,无线网络的频率分配、时间表的制定、寄存器的分配等。解决这些问题的有效算法依赖于图的结构和问题的具体要求,通常会使用启发式方法、回溯算法或贪心算法等策略。
至此,我们已经完成了对图算法常见问题与解决方案的深入探讨。这些算法不仅对于理论研究具有重要意义,而且在现实世界的应用中也显示出了巨大的实用价值。在下一章节中,我们将进一步探索图算法在Python中的应用实践。
# 4. 图算法在Python中的应用实践
## 4.1 图数据库与图算法的结合
### 4.1.1 图数据库Neo4j的基本操作
图数据库是专门用于存储和检索图数据的数据库,其最显著的特点是能够直观、自然地表达实体间的关联关系。Neo4j是目前最流行的图数据库之一,它使用属性图模型,提供了高性能、可伸缩的图数据存储方案。在图数据库Neo4j中,数据以节点(Node)、关系(Relationship)和属性(Property)的形式存储。
要入门Neo4j,首先需要了解其基本操作。以下是一些Neo4j的CRUD(创建、读取、更新、删除)操作的命令和相关概念:
```cypher
// 创建节点
CREATE (n:Person {name: 'Alice', age: 28})
// 创建关系
MATCH (a:Person), (b:Person)
WHERE a.name = 'Alice' AND b.name = 'Bob'
CREATE (a)-[r:KNOWS]->(b)
// 读取节点和关系
MATCH (n)
RETURN n
MATCH (a)-[r]->(b)
WHERE a.name = 'Alice'
RETURN a, type(r), b
// 更新节点或关系的属性
MATCH (n:Person {name: 'Alice'})
SET n.age = 29
// 删除节点或关系
MATCH (n:Person {name: 'Alice'})
DELETE n
MATCH (a:Person)-[r:KNOWS]->(b:Person)
DELETE r
```
Cypher是Neo4j的查询语言,用于与图形数据库进行交互。上述代码块展示了如何创建节点、建立关系、检索数据、修改属性和删除数据。
#### 逻辑分析与参数说明
- `CREATE` 语句用于创建新的节点或关系。
- `MATCH` 语句用于在数据库中查找满足特定条件的节点或关系。
- `RETURN` 用于返回查询的结果。
- `SET` 用于更新节点的属性。
- `DELETE` 用于删除节点或关系。
对于节点和关系,可以使用标签(如 `Person`)来分类它们,并且可以为节点和关系赋予属性(如 `name`, `age`),使得数据更加丰富和灵活。
### 4.1.2 图算法在图数据库中的应用案例
在Neo4j等图数据库中应用图算法可以解决各种复杂问题,如推荐系统、欺诈检测、网络分析等。这里以社区发现和影响力最大化为例,展示图算法在实际应用中的潜力。
#### 社区发现
社区发现是识别网络中紧密连接的节点子集的过程,它可以应用于社交网络分析来识别密切关系的群体。在Neo4j中,可以使用内置的社区发现算法,例如Modularity Optimizer,该算法基于图的模块度,旨在找出高密度的社区结构。
```cypher
CALL algo.modularity([
{id: 0, label: 'Person'},
{id: 1, label: 'Person'},
...
], [
{id: 0, label: 'KNOWS', weight: 1.0},
{id: 1, label: 'KNOWS', weight: 1.0},
...
], {write: true, communityProperty: "community"})
```
这个命令执行了一个社区发现算法,并将结果写回数据库中的 `community` 属性。
#### 影响力最大化
影响力最大化是确定一组起始节点,使得通过这些节点传播信息可以达到最大的覆盖效果。这个概念在营销和社交媒体分析中特别有用。Neo4j的算法库中,可以使用 `PageRank` 算法来评估节点的重要性。
```cypher
CALL algo.pageRank.stream('Person', 'KNOWS', {writeProperty: 'pageRank'})
```
此命令计算 `Person` 节点的 `pageRank` 值,并将结果存储在节点属性中。
#### 逻辑分析与参数说明
在执行 `CALL algo.modularity` 或 `CALL algo.pageRank.stream` 时,需要指定节点和关系的标签及关系类型。`write: true` 表示将算法结果写回数据库,而 `communityProperty` 或 `writeProperty` 参数指定了用于存储计算结果的属性名称。
社区发现和影响力最大化这两个案例,展示了图算法在图数据库中的强大应用,能够从数据的关联结构中提取出有价值的信息和洞察,助力企业更好地理解和优化其业务流程。
## 4.2 网络分析工具的Python实现
### 4.2.1 使用NetworkX进行网络分析
NetworkX是一个用Python编写的开源软件包,用于创建、操作和研究复杂网络的结构、动态及其功能。它提供了丰富的方法来处理无向图、有向图和多图,支持多种数据结构,易于学习和使用。这里,我们着重介绍NetworkX在图数据构建和网络分析中的应用。
#### 构建图数据结构
NetworkX的图可以用多种方式构建,比如从头开始添加节点和边,从其他数据源导入数据,或者从已有的图数据结构创建新的图。
```python
import networkx as nx
# 创建一个空图
G = nx.Graph()
# 添加节点
G.add_node(1)
G.add_nodes_from([2, 3])
# 添加边
G.add_edge(1, 2)
e = [(1, 2), (2, 3)]
G.add_edges_from(e)
# 从其他图数据结构创建新图
H = nx.convert_node_labels_to_integers(G, first_label=0, label_attribute='label')
```
#### 网络分析
NetworkX提供了多种网络分析的工具,包括图的度分布、中心性、连通性等。
```python
# 计算节点的度数
degrees = G.degree()
print(dict(degrees))
# 计算节点的介数中心性
betweenness = nx.betweenness_centrality(G)
print(dict(betweenness))
# 检测网络的连通性
is_connected = nx.is_connected(H)
print(is_connected)
# 查找图中的所有连通分量
components = list(nx.connected_components(H))
print(components)
```
#### 逻辑分析与参数说明
上述代码展示了如何使用NetworkX进行基本的图操作和网络分析。`G.add_node` 和 `G.add_nodes_from` 用于添加单个节点或多个节点,`G.add_edge` 和 `G.add_edges_from` 用于添加单条边或边集。`nx.betweenness_centrality` 计算每个节点的介数中心性,这是一个衡量节点重要性的指标,介数中心性高的节点在网络中可能具有重要的连接作用。
在图的连通性分析中,`nx.is_connected` 函数可以判断图是否连通,而 `nx.connected_components` 函数则用于获取所有连通分量的信息。
### 4.2.2 实际网络数据的图构建与分析
在实际项目中,网络数据可能来源于各种数据源,如日志文件、网络爬虫抓取的数据、社交网络数据等。这里,我们将讨论如何从文本文件中导入网络数据,并进行基本的分析。
#### 从文件导入网络数据
假设我们有一个文本文件,文件中的每行表示一个边,格式为 `src dst`。
```bash
1 2
2 3
4 5
```
我们可以使用以下代码从该文件导入网络数据:
```python
import networkx as nx
G = nx.read_edgelist('graph.edgelist', nodetype=int, data=(('weight', float),))
```
`read_edgelist` 函数默认以空格分隔,`nodetype=int` 指定节点类型为整数,`data` 参数用于指定边的属性。
#### 网络分析
从文本文件中导入网络数据后,我们可能希望对网络进行各种分析,如计算度分布、绘制网络、社区检测等。
```python
import matplotlib.pyplot as plt
# 绘制网络图
pos = nx.spring_layout(G)
nx.draw(G, pos, with_labels=True)
plt.show()
# 进行社区检测
partition = ***munity.girvan_newman(G)
```
使用 `nx.spring_layout` 为图计算一个布局,然后使用 `nx.draw` 进行绘制。使用 `***munity.girvan_newman` 进行社区检测是社区发现中的一个经典算法。
#### 逻辑分析与参数说明
`spring_layout` 函数利用Fruchterman-Reingold力导向算法计算节点位置,它尽量将具有更多连接的节点靠得更近,使得最终图的布局可视化更易于理解。`draw` 函数负责将图绘制出来,参数 `with_labels=True` 表示在图中显示节点的标签。
`girvan_newman` 函数是基于边介数的社区检测算法。它通过迭代移除高介数的边来发现网络社区。这一过程需要多次运行以获取最优化的社区划分结果。
通过NetworkX库,我们可以从导入数据到执行分析的整个工作流程变得非常高效和直观,为IT行业和相关领域的研究者和开发者提供了强大的工具支持。
## 4.3 图算法在社交网络分析中的应用
### 4.3.1 社区发现与网络聚类算法
社区发现算法旨在从网络中发现结构上紧密连接的节点集,通常在网络分析中有着重要的作用。社区发现不仅帮助我们理解网络的结构,还能发现隐含的群体结构。在社交网络分析中,社区发现可以用于识别朋友群、兴趣小组等。
#### 聚类算法的实现
在NetworkX中,实现社区发现的一个简单方法是使用图聚类算法。`community` 模块提供了多个聚类算法的实现,其中 `modularity_matrix` 函数可以帮助我们找到网络的最佳社区结构。
```python
import networkx as nx
from networkx.algorithms import community as nx_comm
# 假设G是已经构建好的社交网络图
# 使用Louvain方法进行社区发现
partition = nx_comm.louvain_communities(G)
# 绘制社区分布
import matplotlib.pyplot as plt
node_colors = [partition.get(node) for node in G.nodes()]
nx.draw(G, node_color=node_colors, with_labels=True)
plt.show()
```
在上面的代码中,`louvain_communities` 函数利用了Louvain方法进行社区发现。该方法以模块度优化为基础,通过迭代优化来发现网络中具有高模块度的社区结构。将社区信息作为节点颜色在绘图中展示,可以直观地看到不同社区的分布。
### 4.3.2 网络影响力最大化与信息传播模型
信息传播模型用于研究网络中信息如何传播,其中影响力最大化是社交网络分析中的一个重要问题。影响力最大化是指找到一组影响力大的节点,通过这些节点传播信息,可以最大化信息的覆盖范围。
#### 影响力最大化模型
在社交网络中,通常使用独立级联(IC)模型和线性阈值(LT)模型来模拟信息传播。这两种模型的目的是找到一组影响力大的种子节点,使得信息能以较高的概率覆盖到整个网络。
```python
from networkx.algorithms.influence maximization import *
import random
# 创建一个图G
# 添加节点和边...
G = nx.Graph()
G.add_nodes_from(range(10))
G.add_edges_from([(1,2), (2,3), (2,4), (2,5), (4,6), (5,6), (6,7)])
# 使用节点重要性作为种子选择的标准
seed_nodes = [n for n in sorted(G.nodes(), key=lambda n: G.degree(n), reverse=True)[:3]]
# 模拟信息传播
influenceSpread = independent_cascade(G, seed_nodes, num_queries=100, seed=1234)
print("影响力覆盖范围:", influenceSpread)
```
在上述代码中,使用了 `independent_cascade` 函数模拟了独立级联模型下的信息传播过程。我们选择了网络中度数最高的前三个节点作为种子节点,并运行了100次模拟来获取信息传播的平均覆盖范围。
#### 逻辑分析与参数说明
在信息传播模型中,节点的度数是影响其影响力的重要因素之一。高度节点更可能与许多其他节点相连,从而有助于信息更快地传播到网络中的其他部分。`independent_cascade` 函数模拟了信息传播过程,`num_queries` 参数指定了模拟次数,每次模拟可能产生不同的结果,因此需要多次查询以获得更准确的平均覆盖范围。
通过这些方法,我们可以有效地分析社交网络中的社区结构和影响力传播。这些分析的结果不仅能够帮助我们理解社交网络的内在机制,还能够指导我们优化营销策略和社交应用设计。
# 5. 图算法的性能优化与实战挑战
## 5.1 图算法的时间复杂度分析
在讨论图算法的性能优化之前,首先要理解算法的时间复杂度,这是评估算法运行时间的重要指标。时间复杂度描述了随着输入数据量的增加,算法执行时间的增长趋势。
### 5.1.1 算法复杂度理论基础
复杂度通常用大O符号表示。例如,O(n)表示算法运行时间随输入规模线性增长,O(n^2)表示时间复杂度与输入规模的平方成正比。对于图算法而言,邻接矩阵的操作通常在O(n^2)的时间复杂度内,而邻接表操作则可能在O(V+E)的时间复杂度内完成,其中V是顶点数,E是边数。
### 5.1.2 具体图算法的时间复杂度剖析
以Dijkstra算法为例,其时间复杂度通常为O(V^2),但如果使用优先队列,可以优化到O((V+E)logV)。Floyd-Warshall算法的时间复杂度为O(V^3),它适用于计算所有顶点对之间的最短路径。对于图算法来说,理解算法在不同情况下的时间复杂度是至关重要的,这有助于我们为特定问题选择合适的算法。
## 5.2 高效图算法的设计与实现
优化图算法不仅需要理解其理论基础,还需要在实现过程中采取具体措施,以提高性能。
### 5.2.1 缓存与预处理技术在图算法中的应用
通过缓存已计算的结果,可以避免重复计算,从而提高算法效率。例如,在路径查找算法中,一旦找到一条路径,可以将这条路径存储起来,以便后续查询。预处理技术是指在算法执行前对数据进行一次性的处理,以减少运行时的计算量。例如,在进行图遍历前,先计算出顶点的访问顺序,可以加速后续的搜索过程。
### 5.2.2 大规模图数据的分布式处理技术
随着数据量的增大,单机的存储和计算能力可能会成为瓶颈。分布式处理技术,比如MapReduce模型,可以将大数据集分片,然后并行处理,最终合并结果。使用分布式图处理框架,如Apache Giraph或GraphX,可以有效地处理大规模图数据。
## 5.3 实战中的图算法挑战与应对
在实际应用中,图算法面临着各种挑战,包括数据的规模、计算资源的限制和算法本身的优化。
### 5.3.1 实际案例分析:图算法在大型网络中的应用
大型社交网络、互联网搜索和生物信息学等领域,图算法都有广泛的应用。以社交网络分析为例,可以使用图算法来发现影响力大的用户节点,优化信息传播路径。在处理这样的大型网络时,算法的效率和优化至关重要。
### 5.3.2 图算法的最新进展及其在Python中的实现
随着计算机科学的发展,图算法也在不断进步。最新的图算法研究,如基于深度学习的图生成模型和图嵌入技术,都在改变着图处理的格局。Python作为一门高级编程语言,有着强大的社区支持和丰富的库,可以帮助开发者快速实现和测试最新的图算法。
为了说明图算法的实现,以下是使用Python中NetworkX库构建一个简单图并计算其最短路径的示例代码:
```python
import networkx as nx
# 创建一个空图
G = nx.Graph()
# 添加顶点和边
G.add_edge(1, 2)
G.add_edge(1, 3)
G.add_edge(2, 3)
G.add_edge(2, 4)
G.add_edge(3, 4)
# 使用Dijkstra算法计算从节点1到节点4的最短路径
path = nx.dijkstra_path(G, source=1, target=4)
print(path) # 输出: [1, 2, 4]
# 使用Floyd-Warshall算法计算所有节点对的最短路径
dist_matrix = nx.floyd_warshall_numpy(G)
print(dist_matrix)
```
此代码段展示了图的基本创建与两种不同算法的调用。这些技术的运用可以有效应对图处理中的挑战,优化算法性能,并提升Python在图算法中的应用价值。
以上章节内容的展示,从理论到实践,都展现了图算法在不同场景下的应用和优化策略。在未来的开发和应用中,我们需要持续探索图算法的更多可能性,以应对日益复杂的计算挑战。

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
欢迎来到 Python 图数据结构模块专栏!本专栏深入探讨了图论在 Python 中的应用,涵盖了从基础概念到高级算法的方方面面。
专栏文章涵盖了广泛的主题,包括:
* 图数据结构的深入解析
* 高效图算法的实战指南
* 优化图数据结构性能的技巧
* 网络流算法的实现
* 最短路径问题的多种解决方案
* 拓扑排序的细节和优化
* 深度优先搜索和广度优先搜索的应用和分析
* 最小生成树算法的应用
* PageRank 算法的实现
* 图社区检测和同构性检测
* 路径查找策略和图匹配算法
* 旅行商问题的近似解
* 项目调度图算法
本专栏旨在为 Python 开发人员提供全面的资源,帮助他们理解和应用图论概念,以解决现实世界中的问题。
专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
揭秘STM32:如何用PWM精确控制WS2812LED亮度(专业速成课)

# 摘要
本文系统介绍了STM32微控制器基础,PWM信号与WS2812LED通信机制,以及实现PWM精确控制的技术细节。首先,探讨了PWM信号的理论基础和在微控制器中的实现方法,随后深入分析了WS2812LED的工作原理和与PWM信号的对接技术。文章进一步阐述了实现PWM精确控制的技术要点,包括STM32定时器配置、软件PWM的实现与优化以及硬件PWM的配置和
深入解构MULTIPROG软件架构:掌握软件设计五大核心原则的终极指南
# 摘要
本文旨在探讨MULTIPROG软件架构的设计原则和模式应用,并通过实践案例分析,评估其在实际开发中的表现和优化策略。文章首先介绍了软件设计的五大核心原则——单一职责原则(SRP)、开闭原则(OCP)、里氏替换原则(LSP)、接口隔离原则(ISP)、依赖倒置原则(DIP)——以及它们在MULTIPROG架构中的具体应用。随后,本文深入分析了创建型、结构型和行为型设计模式在
【天清IPS问题快速诊断手册】:一步到位解决配置难题
# 摘要
本文全面介绍了天清IPS系统,从基础配置到高级技巧,再到故障排除与维护。首先概述了IPS系统的基本概念和配置基础,重点解析了用户界面布局、网络参数配置、安全策略设置及审计日志配置。之后,深入探讨了高级配置技巧,包括网络环境设置、安全策略定制、性能调优与优化等。此外,本文还提供了详细的故障诊断流程、定期维护措施以及安全性强化方法。最后,通过实际部署案例分析、模拟攻击场景演练及系统升级与迁移实
薪酬增长趋势预测:2024-2025年度人力资源市场深度分析

# 摘要
本论文旨在探讨薪酬增长的市场趋势,通过分析人力资源市场理论、经济因素、劳动力供需关系,并结合传统和现代数据分析方法对薪酬进行预
【Linux文件格式转换秘籍】:只需5步,轻松实现xlsx到txt的高效转换
# 摘要
本文全面探讨了Linux环境下文件格式转换的技术与实践,从理论基础到具体操作,再到高级技巧和最佳维护实践进行了详尽的论述。首先介绍了文件格式转换的概念、分类以及转换工具。随后,重点介绍了xlsx到txt格式转换的具体步骤,包括命令行、脚本语言和图形界面工具的使用。文章还涉及了转换过程中的高级技
QEMU-Q35芯片组存储管理:如何优化虚拟磁盘性能以支撑大规模应用
# 摘要
本文详细探讨了QEMU-Q35芯片组在虚拟化环境中的存储管理及性能优化。首先,介绍了QEMU-Q35芯片组的存储架构和虚拟磁盘性能影响因素,深入解析了存储管理机制和性能优化理论。接着,通过实践技巧部分,具体阐述了虚拟磁盘性能优化方法,并提供了配置优化、存储后端优化和QEMU-Q35特性应用的实际案例。案例研究章节分析了大规模应用环境下的虚拟磁盘性能支撑,并展
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )