:YOLOv5算法大比拼:一文看懂与其他目标检测算法的优劣
发布时间: 2024-08-13 19:08:51 阅读量: 13 订阅数: 15 
# 1. YOLOv5算法概述
YOLOv5算法是You Only Look Once(YOLO)目标检测算法系列的最新版本,由Ultralytics团队于2020年提出。与前代版本相比,YOLOv5算法在准确性和速度方面都有了显著提升,使其成为当前最先进的目标检测算法之一。
YOLOv5算法采用单阶段目标检测框架,与两阶段目标检测算法(如Faster R-CNN)不同,它直接从图像中预测目标的边界框和类别概率。这种单阶段设计使得YOLOv5算法能够实现实时目标检测,使其非常适合于视频分析和自动驾驶等应用场景。
# 2. YOLOv5算法理论基础
### 2.1 目标检测算法的基本原理
目标检测算法旨在识别和定位图像或视频中的特定对象。其基本原理通常涉及以下步骤:
- **特征提取:**算法使用卷积神经网络(CNN)从输入图像中提取特征。CNN通过一系列卷积层和池化层处理图像,提取不同层次的特征。
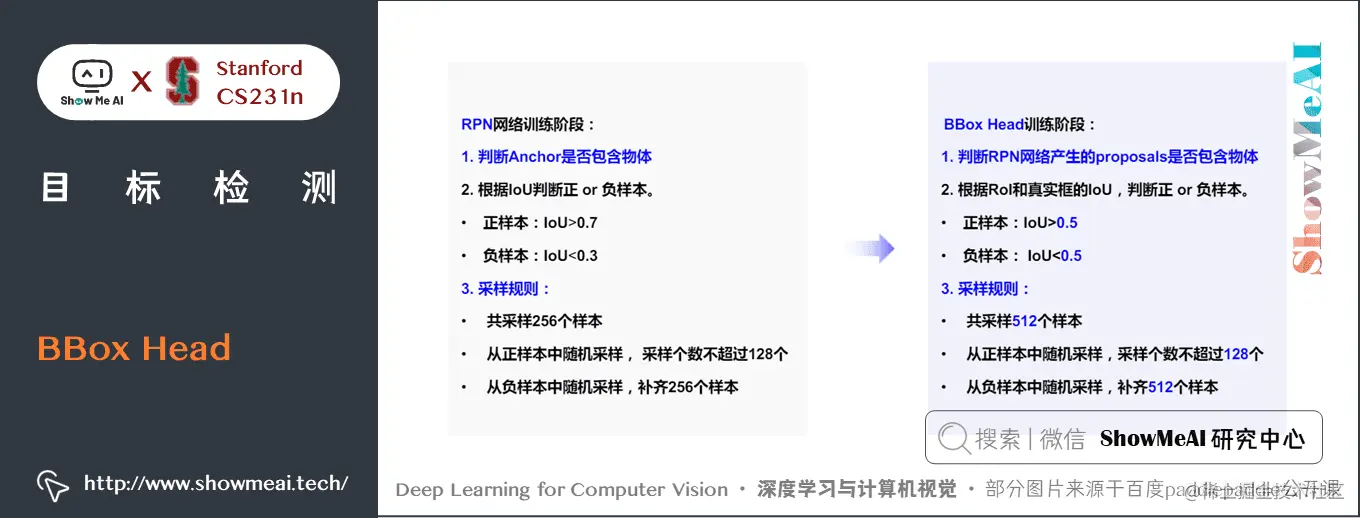
- **区域提议:**算法使用区域提议网络(RPN)生成目标区域的候选框。RPN是一个小型网络,它在特征图上滑动,并预测每个位置的边界框和目标概率。
- **边界框回归:**算法使用边界框回归器对候选框进行微调,使其更准确地与目标对象对齐。边界框回归器是一个小型网络,它预测边界框的偏移量。
- **目标分类:**算法使用目标分类器对每个候选框进行分类,确定其属于哪个目标类别。目标分类器是一个小型网络,它预测每个候选框的类别概率。
### 2.2 YOLOv5算法的网络结构
YOLOv5算法采用了一种称为“You Only Look Once”(YOLO)的单次检测架构。与其他目标检测算法不同,YOLO算法直接从输入图像预测边界框和目标类别,而无需生成候选框。
YOLOv5算法的网络结构主要分为三个部分:
#### 2.2.1 Backbone网络
Backbone网络负责从输入图像中提取特征。YOLOv5算法使用Cross-Stage Partial Networks(CSPNet)作为Backbone网络。CSPNet是一种高效的网络架构,它将输入特征图划分为多个阶段,并使用跨阶段连接来增强特征提取能力。
#### 2.2.2 Neck网络
Neck网络负责将Backbone网络提取的特征融合成用于目标检测的特征图。YOLOv5算法使用Path Aggregation Network(PAN)作为Neck网络。PAN是一个轻量级的网络,它使用自上而下的路径聚合策略将不同阶段的特征图融合在一起。
#### 2.2.3 Head网络
Head网络负责预测边界框和目标类别。YOLOv5算法使用YOLO Head作为Head网络。YOLO Head是一个密集预测网络,它在特征图上的每个网格单元处预测多个边界框和目标类别。
YOLOv5算法的网络结构如下图所示:
```mermaid
graph LR
subgraph Backbone
A[CSPDarknet53]
end
subgraph Neck
B[PAN]
end
subgraph Head
C[YOLO Head]
end
A --> B
B --> C
```
### 2.2.4 代码示例
以下代码示例展示了YOLOv5算法的网络结构:
```python
import torch
from torch import nn
class YOLOv5(nn.Module):
def __init__(self, num_classes):
super().__init__()
```
 最低0.47元/天 解锁专栏
最低0.47元/天 解锁专栏 送3个月
 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
**YOLO 网络识别专栏**
本专栏深入探索 YOLOv5 目标检测算法的各个方面,从架构和原理到应用和优化技巧。涵盖广泛的主题,包括:
* YOLOv5 架构和原理的深入分析
* 提升 YOLOv5 性能的训练优化秘籍
* 解锁 YOLOv5 无限潜力的实战应用宝典
* YOLOv5 与其他目标检测算法的优劣对比
* 快速解决 YOLOv5 常见问题的疑难杂症全攻略
* 从零到一打造目标检测系统的实战项目指南
* 掌握目标检测算法的一步步代码实战手册
* 提升目标检测精度的图像预处理和后处理解析
* 理解模型训练奥秘的损失函数和优化算法揭秘
* 打造最优目标检测模型的网络结构和超参数分析
* 构建高质量训练数据的训练数据集和数据增强秘籍
* 让模型落地应用的部署和推理优化指南
* 全面衡量模型表现的性能评估和基准测试
* 推动目标检测技术发展的算法改进和创新
* 加速模型训练和提升效率的并行化和分布式训练
* 让目标检测触手可及的移动端部署和优化
专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
Kafka Message Queue Hands-On: From Beginner to Expert
# Kafka Message Queue Practical: From Beginner to Expert
## 1. Overview of Kafka Message Queue
Kafka is a distributed streaming platform designed for building real-time data pipelines and applications. It offers a high-throughput, low-latency messaging queue capable of handling vast amounts of dat
MATLAB Reading Financial Data from TXT Files: Financial Data Processing Expert, Easily Read Financial Data
# Mastering Financial Data Handling in MATLAB: A Comprehensive Guide to Processing Financial Data
## 1. Overview of Financial Data
Financial data pertains to information related to financial markets and activities, encompassing stock prices, foreign exchange rates, economic indicators, and more. S
The Industry Impact of YOLOv10: Driving the Advancement of Object Detection Technology and Leading the New Revolution in Artificial Intelligence
# 1. Overview and Theoretical Foundation of YOLOv10
YOLOv10 is a groundbreaking algorithm in the field of object detection, released by Ultralytics in 2023. It integrates computer vision, deep learning, and machine learning technologies, achieving outstanding performance in object detection tasks.
【排序算法在搜索引擎中的应用】:掌握提升搜索效率的秘密武器,增强搜索体验
# 1. 排序算法概述
排序算法是计算机科学中的基础课题之一,它涉及将一系列数据按照特定顺序进行排列的方法。排序不仅能够提升数据检索的效率,而且对于数据处理和分析至关重要。从简单的冒泡排序到复杂的归并排序,每种算法都有其适用场景和性能特点。理解这些基本排序算法对于构建高效的搜索引擎至关重要,因为搜索引擎需要快速准确地返回符合用户查询条件的结果。接下来的章节中,我们将探讨各
NoSQL Database Operations Guide in DBeaver
# Chapter 1: Introduction to NoSQL Database Operations in DBeaver
## Introduction
NoSQL (Not Only SQL) databases are a category of non-relational databases that do not follow the traditional relational database model. NoSQL databases are designed to address issues related to data processing for la
Detailed Explanation of MATLAB Chinese Localization Graphic Interface Display Issues: 5 Solutions for Perfect Chinese Interface Presentation
# 1. In-depth Analysis of MATLAB Chinese Interface Display Issues: 5 Solutions for Perfect Chinese Interface
## 1. Overview of MATLAB Chinese Interface Display Issues
The display issue of MATLAB Chinese interface refers to the situation where there is garbled text, misalignment, or abnormal displa
堆排序与数据压缩:压缩算法中的数据结构应用,提升效率与性能

# 1. 堆排序原理与实现
## 1.1 堆排序的基本概念
堆排序是一种基于比较的排序算法,它利用堆这种数据结构的特性来进行排序。堆是一个近似完全二叉树的结
【性能调优秘籍】:哈希表的10大工作原理与设计策略,提升效率的终极指南
# 1. 哈希表的理论基础与工作原理
哈希表是一种利用哈希函数来快速存取数据的数据结构。它通过计算数据的哈希值来定位数据在内存中的位置,允许快速的插入、删除和查找操作。理论基础包括哈希函数、哈希冲突解决以及负载因子的概念。哈希函数将键映射到表中的位置,理想情况下,每个键都应该有唯一的映射,但在实际应用中,冲突不可避免。解决冲突的方式主
Unveiling the Mysteries of Transpose Matrix: 10 Practical Applications to Master Transpose Matrix
# Demystifying the Transpose Matrix: 10 Applications That Will Make You Master Transpose Matrices
## 1. The Concept and Properties of Transpose Matrices
### 1.1 The Concept of Transpose Matrices
A transpose matrix is obtained by swapping the rows and columns of a matrix. For an m×n matrix A, its
MATLAB's strtok Function: Splitting Strings with Delimiters for More Precise Text Parsing
# Chapter 1: Overview of String Operations in MATLAB
MATLAB offers a rich set of functions for string manipulation, among which the `strtok` function stands out as a powerful tool for delimiter-driven string splitting. This chapter will introduce the basic syntax, usage, and return results of the `
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )