图论算法实战:掌握深度优先搜索和广度优先搜索的秘诀
发布时间: 2024-08-23 23:52:52 阅读量: 17 订阅数: 16 
# 1. 图论基础**
图论是计算机科学中研究图结构及其算法的一门学科。图由一系列节点和连接这些节点的边组成。图论算法用于解决各种问题,例如连通性检测、最短路径查找和拓扑排序。
图论中的基本概念包括:
* **节点:**图中的基本元素,表示实体或对象。
* **边:**连接两个节点的线段,表示节点之间的关系或交互。
* **权重:**与边关联的值,表示边上的成本或距离。
* **路径:**节点的有序序列,其中每两个相邻节点都由一条边连接。
* **连通图:**所有节点都直接或间接连接的图。
# 2. 深度优先搜索**
**2.1 DFS的基本原理**
深度优先搜索(DFS)是一种图论算法,它通过递归或栈的方式沿着一条路径深度探索图中的节点。DFS从一个起始节点开始,访问该节点的所有未访问的相邻节点,然后递归地访问这些相邻节点的未访问的相邻节点,依此类推。
**2.2 DFS的实现与应用**
**2.2.1 递归实现**
```python
def dfs_recursive(graph, start_node):
"""
深度优先搜索的递归实现
参数:
graph: 图的邻接表表示
start_node: 起始节点
"""
visited = set() # 存储已访问的节点
def dfs_helper(node):
if node in visited:
return
visited.add(node)
print(node) # 访问节点
for neighbor in graph[node]:
dfs_helper(neighbor)
dfs_helper(start_node)
```
**代码逻辑分析:**
* `dfs_recursive`函数接收图的邻接表表示和起始节点作为参数。
* 初始化一个集合`visited`来存储已访问的节点。
* 定义辅助函数`dfs_helper`,它递归地访问节点及其未访问的相邻节点。
* 如果节点已访问,则返回。
* 将节点标记为已访问并打印它。
* 遍历节点的所有相邻节点,并递归地调用`dfs_helper`访问它们。
**2.2.2 栈实现**
```python
def dfs_stack(graph, start_node):
"""
深度优先搜索的栈实现
参数:
graph: 图的邻接表表示
start_node: 起始节点
"""
stack = [start_node] # 初始化栈
visited = set() # 存储已访问的节点
while stack:
node = stack.pop() # 弹出栈顶元素
if node in visited:
continue
visited.add(node)
print(node) # 访问节点
for neighbor in graph[node]:
if neighbor not in visited:
stack.append(neighbor)
```
**代码逻辑分析:**
* `dfs_stack`函数接收图的邻接表表示和起始节点作为参数。
* 初始化一个栈`stack`和一个集合`visited`来存储已访问的节点。
* 循环遍历栈,直到栈为空。
* 弹出栈顶元素`node`,并检查它是否已访问。如果已访问,则跳过。
* 将`node`标记为已访问并打印它。
* 遍历`node`的所有未访问的相邻节点,并将其推入栈中。
**2.3 DFS的优化技巧**
为了提高DFS的效率,可以使用以下优化技巧:
* **颜色标记:**使用颜色标记来跟踪节点的状态(白色:未访问,灰色:正在访问,黑色:已访问)。
* **路径压缩:**在递归实现中,对每个节点只访问一次,避免重复访问。
* **循环检测:**在递归实现中,使用栈或队列来检测循环,避免无限递归。
# 3.1 BFS的基本原理
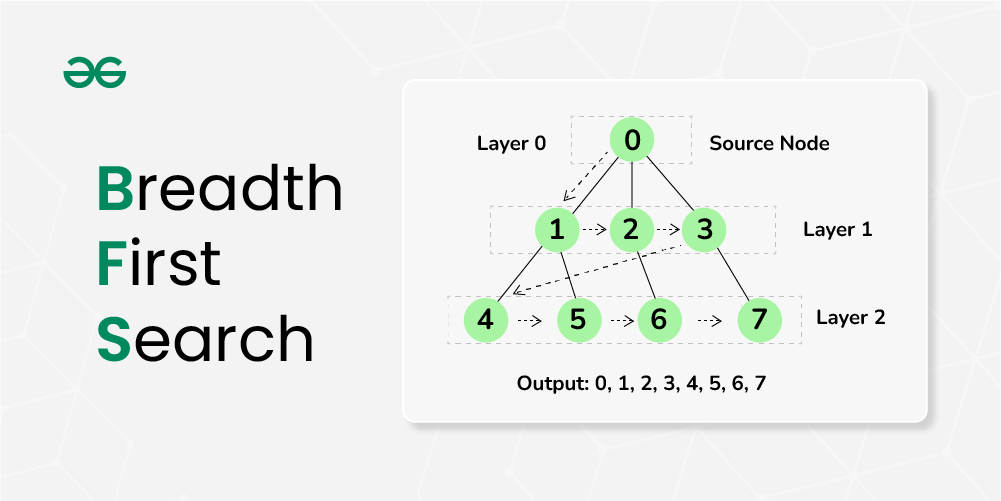
广度优先搜索(BFS)是一种图论算法,它按照图的层次来遍历图中的节点。与深度优先搜索(DFS)不同,BFS不会深入探索一条路径,而是先访问所有与当前节点相邻的节点,然后再访问与这些节点相邻的节点,以此类推。
BFS的基本原理是使用队列数据结构。队列是一种先进先出(FIFO)的数据结构,它可以用来存储要访问的节点。算法从图中的一个起始节点开始,将该节点加入队列。然后,算法从队列中取出第一个节点,并访问其所有相邻节点。这些相邻节点被添加到队列中,然后算法继续从队列中取出节点并访问其相邻节点,直到队列为空。
### 3.2 BFS的实现与应用
#### 3.2.1 队列实现
BFS算法可以使用队列数据结构来实现。以下是用Python实现的BFS算法:
```python
def bfs(graph, start):
queue = [start]
visited = set()
while queue:
node = queue.pop(0) # 从队列中取出第一个节点
if node not in visited:
visited.add(node) # 将节点标记为已访问
for neighbor in graph[node]: # 遍历节点的所有相邻节点
if neighbor not in visited:
queue.append(neighbor) # 将相邻节点添加到队列中
```
**代码逻辑分析:**
1. 该函数接受两个参数:`graph`(图的邻接表表示)和`start`(起始节点)。
2. 它使用一个队列`queue`来存储要访问的节点,并使用一个集合`visited`来跟踪已访问的节点。
3. 算法从队列中取出第一个节点`node`,并将其标记为已访问。
4. 然后,它遍历`node`的所有相邻节点,并将其添加到队列中,如果它们尚未被访问过。
5. 算法重复这个过程,直到队列为空,这意味着图中所有可达的节点都已被访问。
#### 3.2.2 层次遍历
BFS算法的一个常见应用是层次遍历,它以层次结构的形式打印图中的节点。层次遍历从起始节点开始,并逐层打印图中的节点。
以下是用Python实现的层次遍历算法:
```python
def bfs_level_order(graph, start):
queue = [start]
level = 0
while queue:
size = len(queue) # 当前层的节点数
print(f"Level {level}: ", end="")
for i in range(size):
node = queue.pop(0) # 从队列中取出第一个节点
print(node, end=" ")
for neighbor in graph[node]: # 遍历节点的所有相邻节点
if neighbor not in queue:
queue.append(neighbor) # 将相邻节点添加到队列中
level += 1 # 进入下一层
```
**代码逻辑分析:**
1. 该函数接受两个参数:`graph`(图的邻接表表示)和`start`(起始节点)。
2. 它使用一个队列`queue`来存储要访问的节点,并使用一个变量`level`来跟踪当前的层次。
3. 算法从队列中取出当前层的节点,并打印它们。
4. 然后,它遍历每个节点的所有相邻节点,并将其添加到队列中,如果它们尚未被访问过。
5. 算法重复这个过程,直到队列为空,这意味着图中所有可达的节点都已被访问。
# 4. 图论算法实战**
**4.1 连通分量检测**
连通分量检测是图论中的一项基本算法,用于识别图中相互连接的顶点集合。连通分量检测的应用广泛,例如:
- 社交网络分析:识别社交网络中紧密联系的群组。
- 交通网络优化:确定道路网络中相互连接的区域。
- 推荐系统:根据用户行为识别相似用户组。
**4.1.1 深度优先搜索法**
深度优先搜索法(DFS)是一种递归算法,用于检测连通分量。DFS算法从一个顶点开始,深度遍历图,直到访问所有可达的顶点。DFS算法的伪代码如下:
```python
def dfs(graph, vertex):
visited.add(vertex)
for neighbor in graph[vertex]:
if neighbor not in visited:
dfs(graph, neighbor)
```
**参数说明:**
- `graph`:图的邻接表表示。
- `vertex`:当前访问的顶点。
**代码逻辑:**
DFS算法首先将当前顶点标记为已访问,然后遍历当前顶点的所有邻接顶点。如果邻接顶点未被访问,则递归调用DFS算法继续遍历。
**4.1.2 广度优先搜索法**
广度优先搜索法(BFS)是一种基于队列的算法,用于检测连通分量。BFS算法从一个顶点开始,逐层遍历图,直到访问所有可达的顶点。BFS算法的伪代码如下:
```python
def bfs(graph, vertex):
queue.append(vertex)
while queue:
current_vertex = queue.pop(0)
visited.add(current_vertex)
for neighbor in graph[current_vertex]:
if neighbor not in visited:
queue.append(neighbor)
```
**参数说明:**
- `graph`:图的邻接表表示。
- `vertex`:当前访问的顶点。
**代码逻辑:**
BFS算法首先将当前顶点加入队列,然后逐层遍历图。每次从队列中取出一个顶点,并将其标记为已访问。然后遍历当前顶点的所有邻接顶点,如果邻接顶点未被访问,则将其加入队列。
**4.2 最短路径算法**
最短路径算法用于计算图中两点之间的最短路径。最短路径算法的应用广泛,例如:
- 导航系统:计算从起点到目的地的最短路线。
- 网络优化:优化网络流量的路由。
- 供应链管理:确定从供应商到客户的最短运输路径。
**4.2.1 Dijkstra算法**
Dijkstra算法是一种贪心算法,用于计算图中从一个顶点到所有其他顶点的最短路径。Dijkstra算法的伪代码如下:
```python
def dijkstra(graph, source):
dist[source] = 0
while unvisited:
current_vertex = min(unvisited, key=lambda vertex: dist[vertex])
unvisited.remove(current_vertex)
for neighbor in graph[current_vertex]:
new_dist = dist[current_vertex] + graph[current_vertex][neighbor]
if new_dist < dist[neighbor]:
dist[neighbor] = new_dist
prev[neighbor] = current_vertex
```
**参数说明:**
- `graph`:图的邻接表表示,其中边权重存储在`graph[u][v]`中。
- `source`:源顶点。
**代码逻辑:**
Dijkstra算法首先将源顶点的距离初始化为0,然后迭代遍历图中未访问的顶点。每次选择距离源顶点最小的未访问顶点,并将其标记为已访问。然后遍历当前顶点的所有邻接顶点,更新邻接顶点的距离和前驱顶点。
**4.2.2 Floyd算法**
Floyd算法是一种动态规划算法,用于计算图中所有点对之间的最短路径。Floyd算法的伪代码如下:
```python
def floyd_warshall(graph):
for k in range(n):
for i in range(n):
for j in range(n):
if dist[i][k] + dist[k][j] < dist[i][j]:
dist[i][j] = dist[i][k] + dist[k][j]
```
**参数说明:**
- `graph`:图的邻接矩阵表示,其中边权重存储在`graph[i][j]`中。
**代码逻辑:**
Floyd算法首先初始化距离矩阵`dist`,其中`dist[i][j]`表示从顶点`i`到顶点`j`的距离。然后算法迭代遍历所有顶点,并使用动态规划更新距离矩阵。对于每个顶点`k`,算法检查从顶点`i`到顶点`k`的距离加上从顶点`k`到顶点`j`的距离是否小于从顶点`i`到顶点`j`的当前距离。如果更小,则更新`dist[i][j]`。
**4.3 拓扑排序**
拓扑排序是一种算法,用于对有向无环图(DAG)中的顶点进行排序,使得对于任何一条从顶点`u`到顶点`v`的边,`u`在排序中都排在`v`之前。拓扑排序的应用广泛,例如:
- 任务调度:确定任务执行的顺序,以避免循环依赖。
- 软件构建:确定模块编译和链接的顺序。
- 数据流分析:确定数据流的顺序,以优化处理。
**4.3.1 Kahn算法**
Kahn算法是一种基于拓扑排序的算法,用于检测有向无环图(DAG)。Kahn算法的伪代码如下:
```python
def kahn(graph):
in_degree = [0] * n
for vertex in graph:
for neighbor in graph[vertex]:
in_degree[neighbor] += 1
queue = [vertex for vertex in graph if in_degree[vertex] == 0]
while queue:
current_vertex = queue.pop(0)
for neighbor in graph[current_vertex]:
in_degree[neighbor] -= 1
if in_degree[neighbor] == 0:
queue.append(neighbor)
```
**参数说明:**
- `graph`:有向无环图的邻接表表示。
**代码逻辑:**
Kahn算法首先初始化每个顶点的入度为0。然后算法遍历图,并为每个顶点计算其入度。入度为0的顶点被加入队列。算法从队列中取出顶点,并遍历其所有邻接顶点。对于每个邻接顶点,算法将入度减1。如果邻接顶点的入度变为0,则将其加入队列。算法重复执行此过程,直到队列为空。
# 5. 图论算法的应用
图论算法在现实世界中有着广泛的应用,从社交网络分析到交通网络优化,再到推荐系统。本章节将探讨图论算法在这些领域的实际应用。
### 5.1 社交网络分析
社交网络图是一个由节点(代表个人)和边(代表关系)组成的图。图论算法可以用来分析社交网络的结构和特性,从而揭示有关用户行为、信息传播和社区形成的见解。
#### 应用示例:社区检测
社区检测算法可以将社交网络划分为不同的社区,这些社区由紧密联系的节点组成。通过识别社区,我们可以了解用户的社交圈子、兴趣和影响力。
```python
import networkx as nx
# 创建社交网络图
G = nx.Graph()
G.add_nodes_from(['A', 'B', 'C', 'D', 'E', 'F', 'G'])
G.add_edges_from([('A', 'B'), ('B', 'C'), ('C', 'D'), ('D', 'E'), ('E', 'F'), ('F', 'G')])
# 使用 Louvain 算法检测社区
communities = nx.community.greedy_modularity_communities(G)
# 打印社区
print("社区:")
for community in communities:
print(community)
```
### 5.2 交通网络优化
交通网络图是一个由节点(代表路口)和边(代表道路)组成的图。图论算法可以用来优化交通流,减少拥堵和改善出行效率。
#### 应用示例:最短路径算法
最短路径算法可以找到从一个节点到另一个节点的最短路径。在交通网络中,我们可以使用最短路径算法来计算从起点到目的地的最佳路线。
```python
import networkx as nx
# 创建交通网络图
G = nx.Graph()
G.add_nodes_from(['A', 'B', 'C', 'D', 'E'])
G.add_edges_from([('A', 'B', {'weight': 10}), ('A', 'C', {'weight': 15}), ('B', 'C', {'weight': 5}), ('B', 'D', {'weight': 12}), ('C', 'D', {'weight': 10}), ('D', 'E', {'weight': 8})])
# 使用 Dijkstra 算法计算从 A 到 E 的最短路径
path = nx.shortest_path(G, 'A', 'E', weight='weight')
# 打印最短路径
print("最短路径:")
print(path)
```
### 5.3 推荐系统
推荐系统旨在根据用户的历史行为和偏好为用户提供个性化的建议。图论算法可以用来构建用户-物品图,其中节点代表用户和物品,而边代表用户与物品之间的交互。
#### 应用示例:协同过滤
协同过滤算法通过分析用户-物品图中的相似性来推荐物品。相似性可以基于用户之间的共同评分或物品之间的共同用户。
```python
import numpy as np
import pandas as pd
# 创建用户-物品评分矩阵
ratings = pd.DataFrame({
'user': ['A', 'B', 'C', 'D', 'E'],
'item': ['item1', 'item2', 'item3', 'item4', 'item5'],
'rating': [5, 4, 3, 2, 1]
})
# 计算用户之间的相似性
user_similarity = ratings.corr(method='pearson')
# 使用余弦相似性推荐物品
def recommend_items(user, n):
# 获取与给定用户最相似的 n 个用户
similar_users = user_similarity.loc[user].sort_values(ascending=False).index[:n]
# 获取这些用户评分最高的 n 个物品
recommended_items = ratings[ratings['user'].isin(similar_users)]['item'].value_counts().index[:n]
return recommended_items
# 推荐给用户 A 的物品
recommended_items = recommend_items('A', 3)
# 打印推荐的物品
print("推荐的物品:")
print(recommended_items)
```
# 6.1 加权图算法
在实际应用中,图的边通常带有权重,表示边之间的距离、成本或其他度量。加权图算法考虑了边的权重,以找到最优解。
### 加权图的表示
加权图可以使用邻接矩阵或邻接表来表示。邻接矩阵是一个二维数组,其中元素表示两个顶点之间的权重。邻接表是一个由顶点列表组成的数组,每个顶点都有一个指向其邻接边的链表。
### 加权图算法
加权图算法包括:
- **最短路径算法:**寻找从一个顶点到另一个顶点的最短路径。最常见的算法有:
- Dijkstra算法:用于在非负权重图中查找最短路径。
- Floyd算法:用于在任意权重图中查找最短路径。
- **最大生成树算法:**寻找图中连接所有顶点的权重和最小的子图。最常见的算法有:
- Kruskal算法:基于并查集实现。
- Prim算法:基于优先队列实现。
- **最小割算法:**寻找将图划分为两个子图的边集,使得子图之间的权重和最小。最常见的算法有:
- Ford-Fulkerson算法
- Edmonds-Karp算法
### 代码示例
以下代码演示了使用Dijkstra算法查找加权图中从顶点1到顶点5的最短路径:
```python
import heapq
class Graph:
def __init__(self, num_vertices):
self.num_vertices = num_vertices
self.edges = [[] for _ in range(num_vertices)]
self.weights = [[] for _ in range(num_vertices)]
def add_edge(self, u, v, weight):
self.edges[u].append(v)
self.weights[u].append(weight)
def dijkstra(graph, start):
distance = [float('inf')] * graph.num_vertices
distance[start] = 0
pq = [(0, start)]
while pq:
current_distance, current_vertex = heapq.heappop(pq)
if current_distance > distance[current_vertex]:
continue
for neighbor in graph.edges[current_vertex]:
new_distance = current_distance + graph.weights[current_vertex][neighbor]
if new_distance < distance[neighbor]:
distance[neighbor] = new_distance
heapq.heappush(pq, (new_distance, neighbor))
return distance
# 创建一个加权图
graph = Graph(6)
graph.add_edge(0, 1, 4)
graph.add_edge(0, 2, 2)
graph.add_edge(1, 2, 3)
graph.add_edge(1, 3, 2)
graph.add_edge(2, 4, 6)
graph.add_edge(3, 4, 1)
graph.add_edge(4, 5, 5)
# 从顶点1查找最短路径
distances = dijkstra(graph, 1)
print(distances)
```

 百万级
高质量VIP文章无限畅学
百万级
高质量VIP文章无限畅学
 千万级
优质资源任意下载
千万级
优质资源任意下载
 C知道
免费提问 ( 生成式Al产品 )
C知道
免费提问 ( 生成式Al产品 )
0
0
相关推荐

专栏简介
本专栏深入探讨了图论的基础和应用,提供了一系列图论算法的实战指南。专栏从图的表示和遍历算法的奥秘入手,深入解析了深度优先搜索和广度优先搜索的秘诀,揭示了图论算法的精髓。通过实战案例,专栏带领读者探索图论世界的深度与广度,掌握图论算法的应用技巧,为解决现实世界中的问题提供强大的工具。
专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )
最新推荐
【R语言生存分析进阶】:多变量Cox模型的建立与解释秘籍
# 1. R语言生存分析基础
生存分析在医学研究领域扮演着至关重要的角色,尤其是在评估治疗效果和患者生存时间方面。R语言作为一种强大的统计编程语言,提供了多
R语言生存分析:Poisson回归与事件计数解析
# 1. R语言生存分析概述
在数据分析领域,特别是在生物统计学、医学研究和社会科学领域中,生存分析扮演着重要的角色。R语言作为一个功能强大的统计软件,其在生存分析方面提供了强大的工具集,使得分析工作更加便捷和精确。
生存分析主要关注的是生存时间以及其影响因素的统计分析,其中生存时间是指从研究开始到感兴趣的事件发生的时间长度。在R语言中,可以使用一系列的包和函数来执行生存分析,比如`survival
机器学习竞赛中的R语言cforest包:经验分享与应用技巧

# 1. R语言cforest包概述
R语言的`cforest`包提供了一个重要的算法——条件推断树(Conditional Inference Trees)的随机森林版本。它允许我们构建一个由多个条件推断树组成的森林,这些树在随机分割变量和观测值时采取了一种非贪婪的方式,从而能够提供对数据更深入的理解。`cforest`对于处理高维数据、避免过拟合以及处理类别变量方面表现出色,使其成为统计分析和机器学习任务中一个值得信赖的工具。本章节将为你
R语言非线性回归模型与预测:技术深度解析与应用实例
# 1. R语言非线性回归模型基础
在数据分析和统计建模的世界里,非线性回归模型是解释和预测现实世界复杂现象的强大工具。本章将为读者介绍非线性回归模型在R语言中的基础应用,奠定后续章节深入学习的基石。
## 1.1 R语言的统计分析优势
R语言是一种功能强大的开源编程语言,专为统计计算和图形设计。它的包系统允许用户访问广泛的统计方法和图形技术。R语言的这些
特征重要性评估手册
# 1. 特征重要性评估概述
特征重要性评估是机器学习和数据科学中的一个核心环节,它涉及到从原始数据中识别出哪些特征对最终模型预测有显著贡献。评估特征的重要性不仅可以帮助我们更好地理解数据,还能指导特征工程过程,例如进行特征选择或降维,从而提高模型的性能和效率。
在构建机器学习模型时,特征的选择往往决定了模型的质量和解释力。一个优秀的特征可以帮助模型更准确地捕捉到数据中的关键信息,而一个无关的特征可能会引入噪声,甚至导致模型过拟合。因
R语言数据包与外部数据源连接:导入选项的全面解析
# 1. R语言数据包概述
R语言作为统计分析和图形表示的强大工具,在数据科学领域占据着举足轻重的位置。本章将全面介绍R语言的数据包,即R中用于数据处理和分析的各类库和函数集合。我们将从R数据包的基础概念讲起,逐步深入到数据包的安装、管理以及如何高效使用它们进行数据处理。
## 1.1 R语言数据包的分类
数据包(Pa
缺失数据处理:R语言glm模型的精进技巧
# 1. 缺失数据处理概述
数据处理是数据分析中不可或缺的环节,尤其在实际应用中,面对含有缺失值的数据集,有效的处理方法显得尤为重要。缺失数据指的是数据集中某些观察值不完整的情况。处理缺失数据的目标在于减少偏差,提高数据的可靠性和分析结果的准确性。在本章中,我们将概述缺失数据产生的原因、类型以及它对数据分析和模型预测的影响,并简要介绍数
R语言统计建模深入探讨:从线性模型到广义线性模型中residuals的运用
# 1. 统计建模与R语言基础
## 1.1 R语言简介
R语言是一种用于统计分析、图形表示和报告的编程语言和软件环境。它的强大在于其社区支持的丰富统计包和灵活的图形表现能力,使其在数据科学
【R语言生存曲线】:掌握survminer包的绘制技巧

# 1. R语言生存分析基础
## 1.1 生存分析概述
生存分析是统计学的一个重要分支,专门用于研究时间到某一事件发生的时间数据。在医学研究、生物学、可靠性工程等领域中,生存分析被广泛应用,例如研究患者生存时间、设备使用寿命等。R语言作为数据分析的
R语言数据包coxph使用全解:常见问题速查与解决方案

# 1. R语言coxph包基础
在统计分析领域,生存分析是一项关键的技能,而R语言中的`coxph`包则提供了一种强大的工具来构建和分析Cox比例风险模型。本章将为读者介绍`coxph`包的基础知识,包括包的安装、加载以及如何利用该包进行基础的生存分析。
首先,`coxph`包是R语言中survival包的一部分,通常用于时间到事件(如死亡、疾病复发等)的数据分析。coxph代
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


专栏目录
最低0.47元/天 解锁专栏
买1年送3个月
百万级
高质量VIP文章无限畅学
千万级
优质资源任意下载
C知道
免费提问 ( 生成式Al产品 )