AY-G2PL KIT用户手册:MSP-EXP430G2搭配指南与实验示例
需积分: 9 176 浏览量
更新于2024-07-15
收藏 3.31MB PDF 举报
AY-G2PL KIT_用户手册是一份详细的指南,专为杭州艾研信息技术有限公司的口袋实验平台(AY-G2PLKIT)与MSP-EXP430G2 LaunchPad实验板配合使用而设计。该手册涵盖了从入门到实践的全方位内容,旨在帮助大学生入门单片机电子设计。
首先,手册强调了与MSP-EXP430G2的兼容性,表明它作为核心组件对于整个平台的功能至关重要。它提到的配套书籍《从零开启大学生电子设计之路》深入浅出地介绍了单片机基础知识、编程技巧以及利用口袋实验平台进行实验的方法。
手册详细部分包括:
1. **概述**:提供平台的整体介绍,帮助用户理解其设计理念和功能定位。
2. **硬件**:指导用户正确安装和使用盒内包含的晶振,通过示意图展示了晶振的焊接方法,确保电路的稳定性和准确性。
3. **软件**:
- **开发软件**:介绍了用于开发和调试的软件工具,可能涉及到Keil、MSP430 Code Composer Studio等。
- **例程代码**:提供了丰富的实例代码,如DCO频率变化观察、中断按键处理、PWM驱动LED调节亮度、呼吸灯效果等,便于用户学习和实践。
- **视频教程**:包括快速培训演示文档和例程演示录像,辅助用户通过视觉学习。
4. **实验例程**:覆盖了一系列实际应用项目,如定时按键扫描、长短键识别、电容触摸控制、人机交互、SD卡读写、I2C扩展IO、LCD显示自检、以及拨盘电位器操作,展示了平台的多样性和实用性。
这份手册不仅提供了理论知识,还提供了动手操作的实践步骤,旨在培养学生的动手能力和理论联系实际的能力。用户可以通过杭州艾研的信息支持渠道获取最新的产品信息和技术支持,例如通过电话、邮件或访问官方网站获取帮助和资源。手册最后列出公司的地址,方便用户在遇到问题时寻求实体服务。
AY-G2PL KIT_用户手册是针对MSP-EXP430G2 LaunchPad实验板和AY-G2PLKIT平台的学习和开发指南,旨在简化入门过程,促进嵌入式系统和单片机项目的实践探索。
3
2 硬件
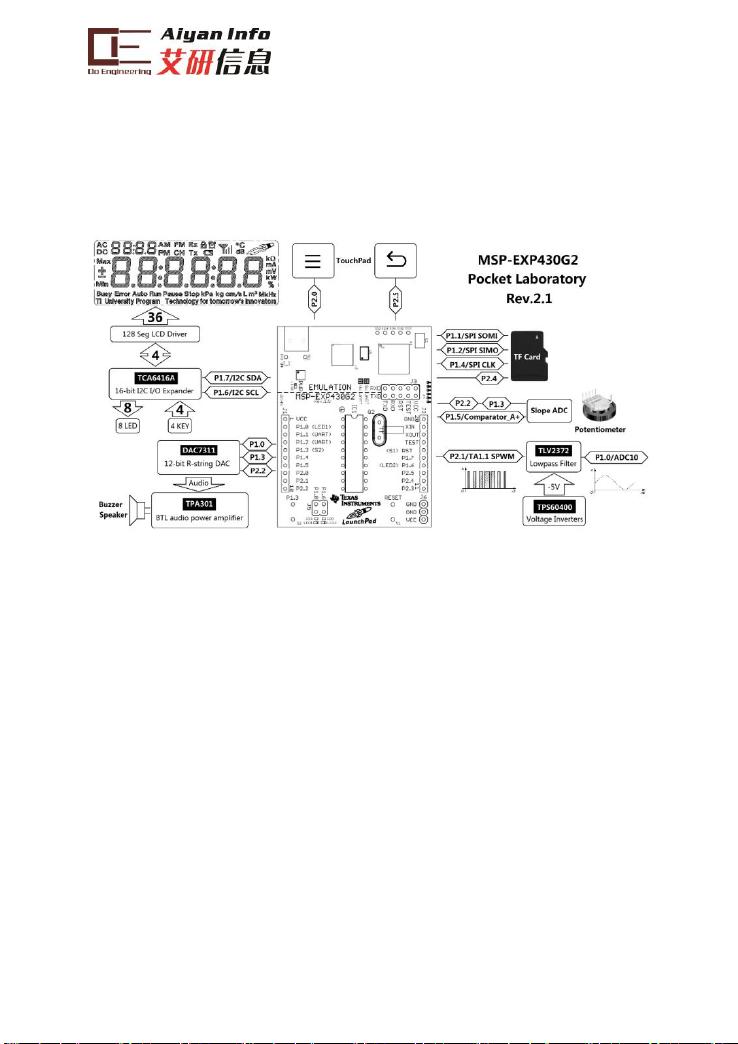
口袋实验室硬件原理框图如图 1 所示,参考图 1 和表 2:
图 1 口袋实验室硬件原理框图
1) 显 示 和 输 入 单 元: 口 袋实验平 台 利 用 I2C 接 口 的
TCA6416A 扩展出 16 个低速双向 IO(IO00~IO07,
IO10~IO17)。4 个扩展 IO 用 于控制 LCD 驱动器
HT1621,4 个用于机械按键输入,8 个用于 LED 灯柱。
2) 触摸按键单元:两个触摸按键占用 P2.0 和 P2.5 两个
GPIO,MSP430G2 系列单片机的 P1 和 P2 全部具备振
荡功能。
3) 模拟输出单元:外 部扩展了 12 位 串行数模转换器
DAC7311,使用 P1.0/P1.3/P2.2 三个普通 GPIO 控制。
这三个 IO 同时被其他单元复用,但由于 DAC7311 都是

剩余52页未读,继续阅读
2020-03-08 上传
2021-10-01 上传
2021-03-02 上传
2023-06-13 上传
2023-07-10 上传
2023-07-11 上传
2023-05-23 上传
2023-06-08 上传
2023-05-24 上传
2023-06-01 上传

Ringo2020
- 粉丝: 53
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- C语言数组操作:高度检查器编程实践
- 基于Swift开发的嘉定单车LBS iOS应用项目解析
- 钗头凤声乐表演的二度创作分析报告
- 分布式数据库特训营全套教程资料
- JavaScript开发者Robert Bindar的博客平台
- MATLAB投影寻踪代码教程及文件解压缩指南
- HTML5拖放实现的RPSLS游戏教程
- HT://Dig引擎接口,Ampoliros开源模块应用
- 全面探测服务器性能与PHP环境的iprober PHP探针v0.024
- 新版提醒应用v2:基于MongoDB的数据存储
- 《我的世界》东方大陆1.12.2材质包深度体验
- Hypercore Promisifier: JavaScript中的回调转换为Promise包装器
- 探索开源项目Artifice:Slyme脚本与技巧游戏
- Matlab机器人学习代码解析与笔记分享
- 查尔默斯大学计算物理作业HP2解析
- GitHub问题管理新工具:GIRA-crx插件介绍
