提升模型鲁棒性和不确定性:AUGMIX数据处理方法
需积分: 10 12 浏览量
更新于2024-07-09
收藏 6.28MB PDF 举报
"AUGMIX:一种改进鲁棒性和不确定性数据处理方法,源自ICLR2020会议论文,由Dan Hendrycks等人提出。"
现代深度神经网络在训练分布和测试分布完全相同的情况下可以达到高精度,但在实际应用中,这种假设往往不成立。当训练和测试分布不匹配时,模型的准确性会急剧下降。目前,针对部署过程中可能遇到的未知数据漂移,提高模型鲁棒性的技术相对较少。为此,论文提出了AUGMIX技术,这是一种易于实现的数据处理方法,增加的计算开销有限,有助于模型应对未预见的图像失真。
AUGMIX的主要目标是提升图像分类器的鲁棒性和不确定性估计。通过混合和增强图像,它可以帮助模型在面对各种噪声或失真的情况下保持稳定性能。该方法显著提高了模型对未知数据干扰的抵抗力,并且改善了不确定性度量,这在实际应用中至关重要,因为模型需要能够识别其预测的不确定性,特别是在面临未见过的数据时。
AUGMIX的工作原理是,首先应用一系列随机的图像增强操作(如旋转、裁剪、颜色抖动等)来生成多个增强版本的原始图像。然后,这些增强图像被混合在一起,形成一个新的合成图像,这个过程涉及到权重的加权平均。最后,模型在合成图像上进行训练,这样模型就能学习到不同增强操作下的图像特征,从而提高其泛化能力和对未知数据的适应性。
实验结果表明,AUGMIX在多个基准数据集上的表现优于现有的数据增强技术,例如Cutout、Mixup和RandomErasing。它不仅提升了模型在标准测试集上的性能,还在对抗性攻击和分布外数据上的鲁棒性方面取得了显著进步。此外,AUGMIX还增强了模型的不确定性估计,这对于安全关键应用(如自动驾驶、医疗诊断等)来说尤其重要,因为这些应用需要模型能够识别超出其训练范围的输入。
AUGMIX是一种有效的数据处理策略,它可以提高计算机视觉模型在面对真实世界复杂性和不确定性时的性能。这种方法简单易用,无需复杂的预处理步骤,而且可以与现有的模型训练框架无缝集成,对于任何希望提升模型鲁棒性的研究者和开发者来说都是一个值得尝试的方法。
Published as a conference paper at ICLR 2020
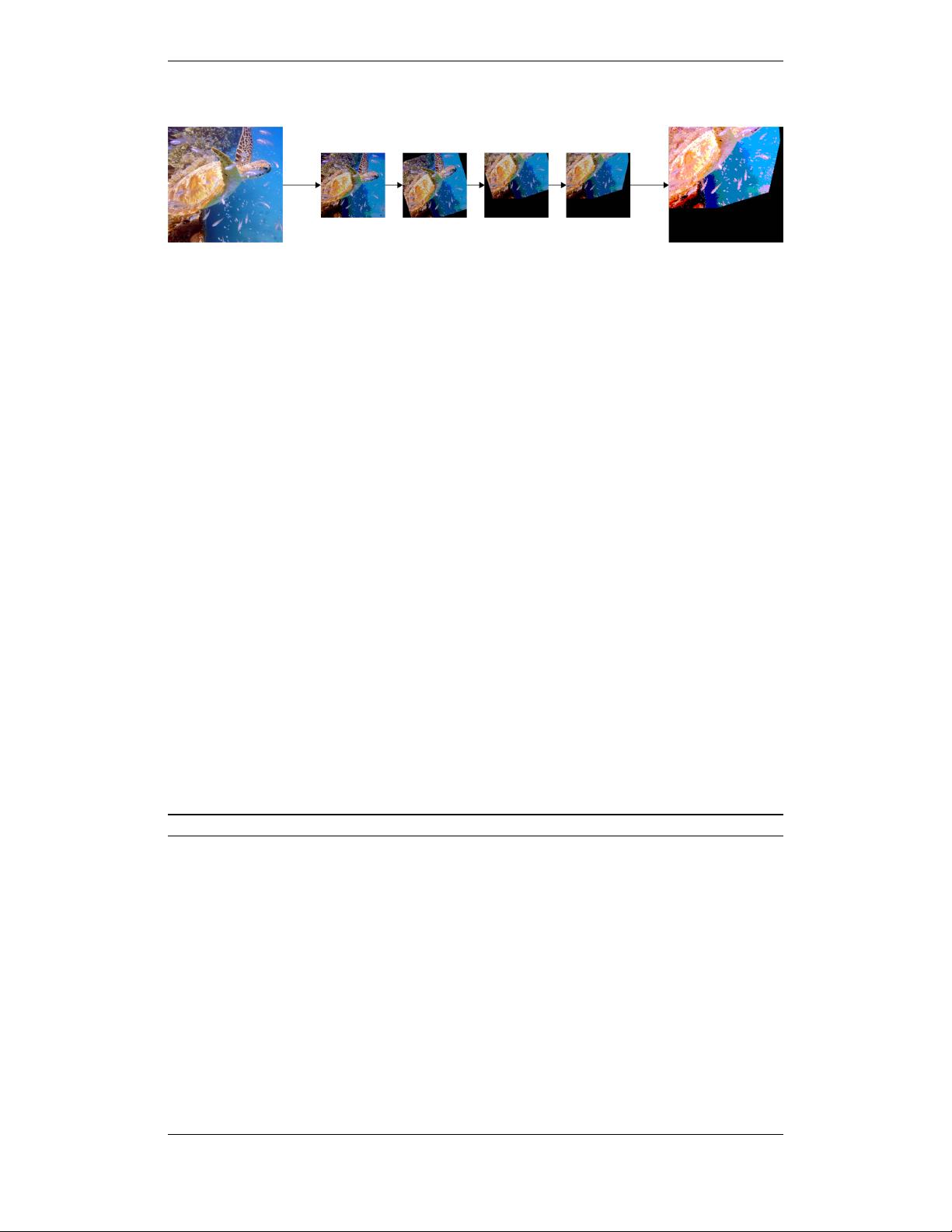
Figure 3: A cascade of successive compositions can produce images which drift far from the original
image, and lead to unrealistic images. However, this divergence can be balanced by controlling the
number of steps. To increase variety, we generate multiple augmented images and mix them.
et al., 2017; Tokozume et al., 2018). Guo et al. (2019) show that Mixup can be improved with
an adaptive mixing policy, so as to prevent manifold intrusion. Separate from these approaches
are learned augmentation methods such as AutoAugment (Cubuk et al., 2018), where a group of
augmentations is tuned to optimize performance on a downstream task. Patch Gaussian augments
data with Gaussian noise applied to a randomly chosen portion of an image (Lopes et al., 2019). A
popular way to make networks robust to
p
adversarial examples is with adversarial training (Madry
et al., 2018), which we use in this paper. However, this tends to increase training time by an order of
magnitude and substantially degrades accuracy on non-adversarial images (Raghunathan et al., 2019).
3 AUGMIX
AUGMIX is a data augmentation technique which improves model robustness and uncertainty esti-
mates, and slots in easily to existing training pipelines. At a high level, AugMix is characterized by its
utilization of simple augmentation operations in concert with a consistency loss. These augmentation
operations are sampled stochastically and layered to produce a high diversity of augmented images.
We then enforce a consistent embedding by the classifier across diverse augmentations of the same
input image through the use of Jensen-Shannon divergence as a consistency loss.
Mixing augmentations allows us to generate diverse transformations, which are important for inducing
robustness, as a common failure mode of deep models in the arena of corruption robustness is the
memorization of fixed augmentations (Vasiljevic et al., 2016; Geirhos et al., 2018). Previous methods
have attempted to increase diversity by directly composing augmentation primitives in a chain, but
this can cause the image to quickly degrade and drift off the data manifold, as depicted in Figure 3.
Such image degradation can be mitigated and the augmentation diversity can be maintained by mixing
together the results of several augmentation chains in convex combinations. A concrete account of
the algorithm is given in the pseudocode below.
Algorithm AUGMIX Pseudocode
1: Input: Model ˆp, Classification Loss L, Image x
orig
, Operations O = {rotate, . . . , posterize}
2: function AugmentAndMix(x
orig
, k = 3, α = 1)
3: Fill x
aug
with zeros
4: Sample mixing weights (w
1
, w
2
, . . . , w
k
) ∼ Dirichlet(α, α, . . . , α)
5: for i = 1, . . . , k do
6: Sample operations op
1
, op
2
, op
3
∼ O
7: Compose operations with varying depth op
12
= op
2
◦ op
1
and op
123
= op
3
◦ op
2
◦ op
1
8: Sample uniformly from one of these operations chain ∼ {op
1
, op
12
, op
123
}
9: x
aug
+= w
i
· chain(x
orig
) Addition is elementwise
10: end for
11: Sample weight m ∼ Beta(α, α)
12: Interpolate with rule x
augmix
= mx
orig
+ (1 − m)x
aug
13: return x
augmix
14: end function
15: x
augmix1
= AugmentAndMix(x
orig
) x
augmix1
is stochastically generated
16: x
augmix2
= AugmentAndMix(x
orig
) x
augmix1
6= x
augmix2
17: Loss Output: L(ˆp(y | x
orig
), y) + λ Jensen-Shannon(ˆp(y | x
orig
); ˆp(y|x
augmix1
); ˆp(y|x
augmix2
))
3
剩余14页未读,继续阅读
2014-07-15 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情

潜夙
- 粉丝: 0
- 资源: 40
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
