
最详细的最详细的Ubuntu18配置配置px4_ros_gazebo仿真仿真
本教程将在Ubuntu18安装ros, px4工具链, 以及gazebo仿真环境
参考此教程可以在Ubuntu16的环境安装ros, px4工具链, 以及gazebo仿真环境
首先,我们来看下Ubuntu各版本对应的gazebo关系,在Ubuntu18中已经安装gazebo9.0
各版本的对应关系如下:请注意ubuntu18对应melodic,ubuntu16对应kinetic
Ubuntu 14.04 Trusty Tahr – ROS Indigo Igloo – Gazebo 2.X 2014-2019
Ubuntu 16.04 Xenial Xerus – ROS Kinetic Kame – Gazebo 7.X 2016-2021
Ubuntu 18.04 Bionic Beaver – ROS Melodic Morenia – Gazebo 9.X 2018-2023
**
1.安装安装px4_toolchain
首先我们来看下px4官网给出的安装说明,px4官网px4官网参考链接
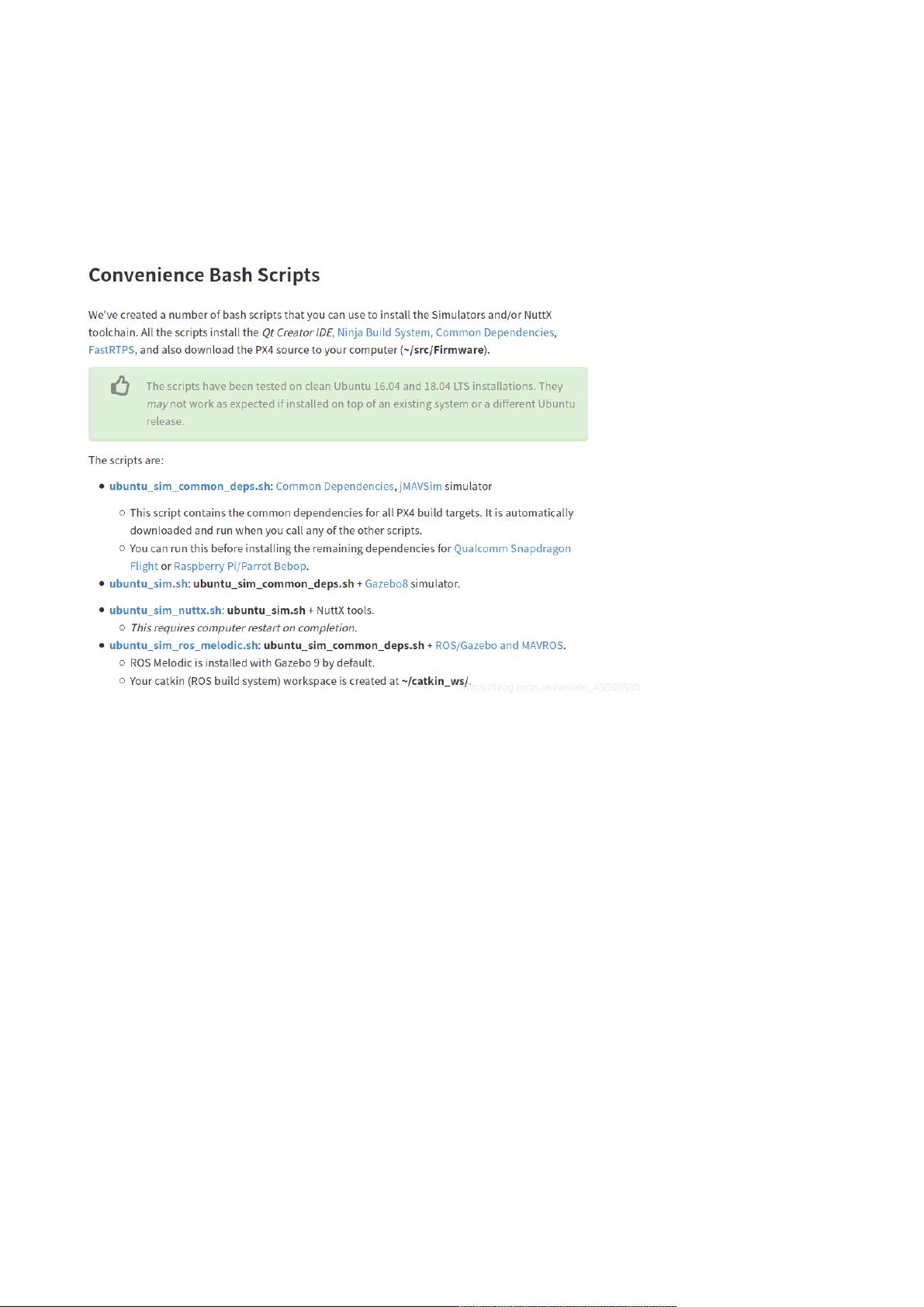
1.px4提供的安装脚本,可以看到melodic版本需要ubuntu_sim_common_deps.sh + ROS/Gazebo and MAVROS
考虑到可能已经安装过ros, 这里我们选择使用
ubuntu_sim_common_deps.sh脚本, 该脚本不会安装gazebo,不然会将ros-melodic中安装的gazebo9覆盖,ubuntu 16版本同样可使用该脚本
step1:
新建脚本一个空的文件ubuntu_sim_common_deps.sh,我直接在vscode中写入保存为.sh文件,可直接复制粘贴,无需改动,只安装px4工具链,代码如下:
#!/bin/bash
## Bash script for setting up a PX4 development environment on Ubuntu LTS (16.04).
## It can be used for installing simulators (only) or for installing the preconditions for Snapdragon Flight or Raspberry Pi.
##
## Installs:
## - Common dependencies and tools for all targets (including: Ninja build system, Qt Creator, pyulog)
## - FastRTPS and FastCDR
## - jMAVSim simulator dependencies
## - PX4/Firmware source (to ~/src/Firmware/)
# Preventing sudo timeout https://serverfault.com/a/833888
trap "exit" INT TERM; trap "kill 0" EXIT; sudo -v || exit $?; sleep 1; while true; do sleep 60; sudo -nv; done 2>/dev/null &
# Ubuntu Config
echo "We must first remove modemmanager"
sudo apt-get remove modemmanager -y
# Common dependencies
echo "Installing common dependencies"
sudo apt-get update -y
sudo apt-get install git zip qtcreator cmake build-essential genromfs ninja-build exiftool astyle -y
# make sure xxd is installed, dedicated xxd package since Ubuntu 18.04 but was squashed into vim-common before
which xxd || sudo apt install xxd -y || sudo apt-get install vim-common --no-install-recommends -y
# Required python packages
sudo apt-get install python-argparse python-empy python-toml python-numpy python-dev python-pip -y
sudo -H pip install --upgrade pip
sudo -H pip install pandas jinja2 pyserial pyyaml
# optional python tools
sudo -H pip install pyulog
# Install FastRTPS 1.7.1 and FastCDR-1.0.8
fastrtps_dir=$HOME/eProsima_FastRTPS-1.7.1-Linux
echo "Installing FastRTPS to: $fastrtps_dir"
if [ -d "$fastrtps_dir" ] then
echo " FastRTPS already installed."
else
pushd .
cd ~
wget https://www.eprosima.com/index.php/component/ars/repository/eprosima-fast-rtps/eprosima-fast-rtps-1-7-1/eprosima_fastrtps-1-7-1-linux-tar-gz -O eprosima_fastrtps-1-7-1-
linux.tar.gz

weixin_38500948
- 粉丝: 3
- 资源: 915
 我的内容管理
收起
我的内容管理
收起
- 我的资源
快来上传第一个资源
 我的收益 登录查看自己的收益
我的收益 登录查看自己的收益 我的积分
登录查看自己的积分
我的积分
登录查看自己的积分
 我的C币
登录后查看C币余额
我的C币
登录后查看C币余额
 我的收藏
我的收藏  我的下载
我的下载  下载帮助
下载帮助

会员权益专享




最新资源
- RTL8188FU-Linux-v5.7.4.2-36687.20200602.tar(20765).gz
- c++校园超市商品信息管理系统课程设计说明书(含源代码) (2).pdf
- 建筑供配电系统相关课件.pptx
- 企业管理规章制度及管理模式.doc
- vb打开摄像头.doc
- 云计算-可信计算中认证协议改进方案.pdf
- [详细完整版]单片机编程4.ppt
- c语言常用算法.pdf
- c++经典程序代码大全.pdf
- 单片机数字时钟资料.doc
- 11项目管理前沿1.0.pptx
- 基于ssm的“魅力”繁峙宣传网站的设计与实现论文.doc
- 智慧交通综合解决方案.pptx
- 建筑防潮设计-PowerPointPresentati.pptx
- SPC统计过程控制程序.pptx
- SPC统计方法基础知识.pptx
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈



评论0