机器人避障路径优化:Dijkstra算法与非线性规划
版权申诉
173 浏览量
更新于2024-06-23
收藏 655KB DOC 举报
"本文详细探讨了机器人避障问题,主要涉及两个关键问题:最短路径规划和最短时间路径规划。作者运用分析法、图论和非线性规划方法,为解决这些问题提供了深入的理论基础和实用算法。
在最短路径规划部分,作者首先提出了三个基本原理:靠近障碍物顶点转弯的路径最短、转弯圆弧半径最小时路径最短,以及转弯在中间目标点附近的最优位置。基于这些原理,文章通过模型变换和障碍物处理,构建了一个圆角化的障碍图。通过扩充的跨立实验,设计了一种判断切线和圆弧是否在可避障区的算法。接着,应用Dijkstra算法计算出从起点到各个目标点的最短路径,例如O到A、B、C的最短距离分别为471.0372、853.7001和1086.0677个单位。对于需经过中间目标点的路径,采用启发式规则初步计算,再微调得到最短路径,如O-A-B-C-O的路径为2748.699个单位。
在最短时间路径规划方面,文章考虑了路径长度和转弯圆弧半径对时间的影响,构建了以总时间最小为目标的非线性规划模型。借助Matlab编程,求解出从起点到目标点A的最短时间路径为472.4822个单位,最短时间为94.3332秒。这个路径中的圆弧圆心坐标为[pic],圆弧的两个切点坐标分别是(70.88,212.92)和(77.66,219.87)。
场景图是一个800x800的平面,包含12个不同形状的障碍物,例如编号1的正方形、编号2的圆形、编号3的平行四边形和编号4的三角形等。每个障碍物都有其特定的几何特征,例如边长、半径、顶点坐标等,这些信息用于构建避障模型并进行路径规划。
本文的关键技术包括Dijkstra算法的应用,这是一种用于寻找图中两点间最短路径的经典算法,适合处理带有权重的图。非线性规划模型则允许在考虑多种约束条件下,寻找使目标函数达到极小值的解决方案。此外,跨立实验分析法则是一种实验性的方法,用于验证和优化路径规划策略。
这篇文档详细阐述了如何通过综合运用各种数学工具来解决机器人避障问题,为实际的机器人导航系统设计提供了有价值的理论指导和技术支持。"
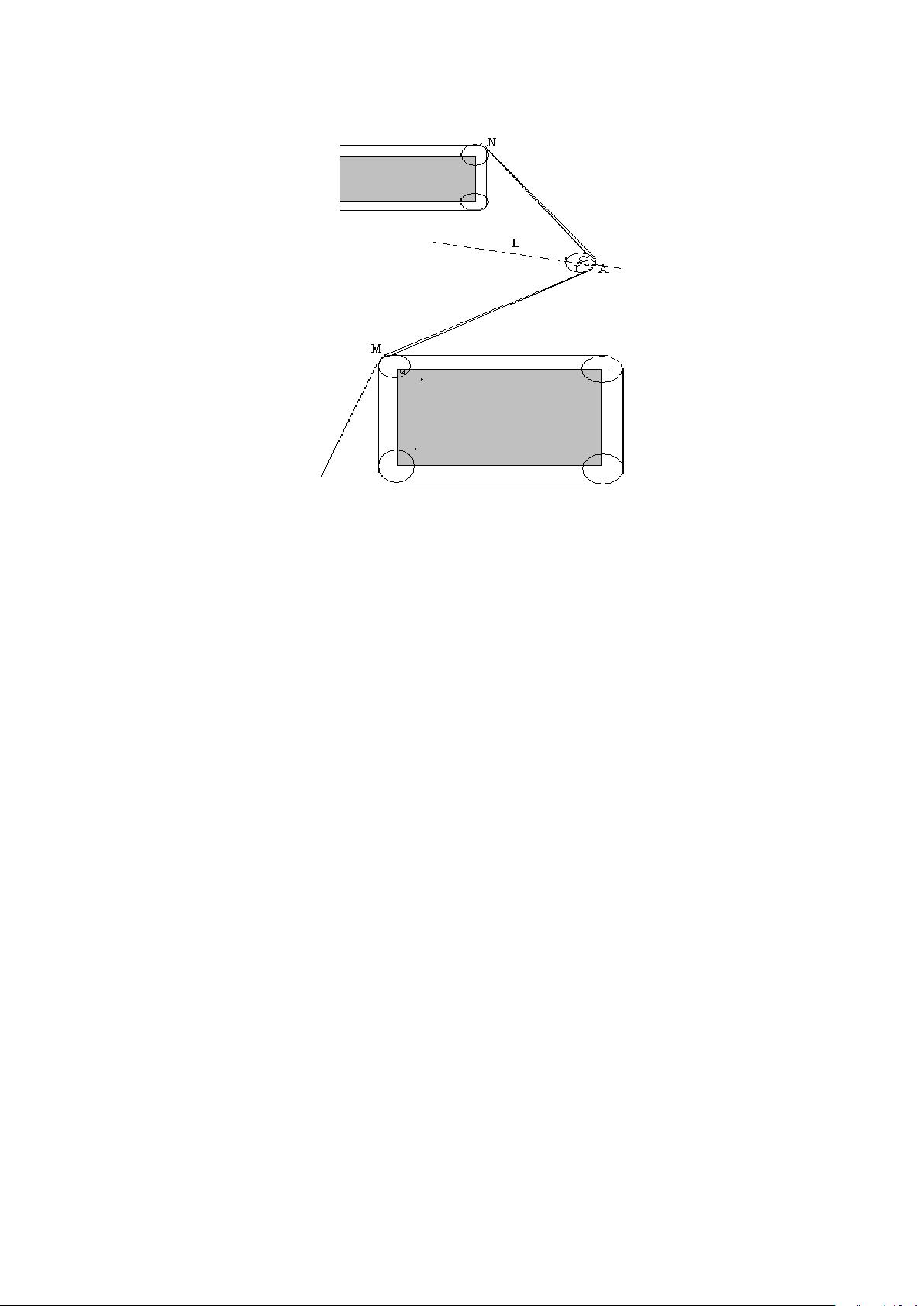
图 3
作法:过 A 点分别作圆上 M,N 的切线,作
MANÐ
的角平分线,在
l
上距离 A
点 10 个单位处选取一点 O,以 O 为圆心,10 个单位为半径,作圆 O,再过 M,N
分别作圆 O 的切线,即为路径。
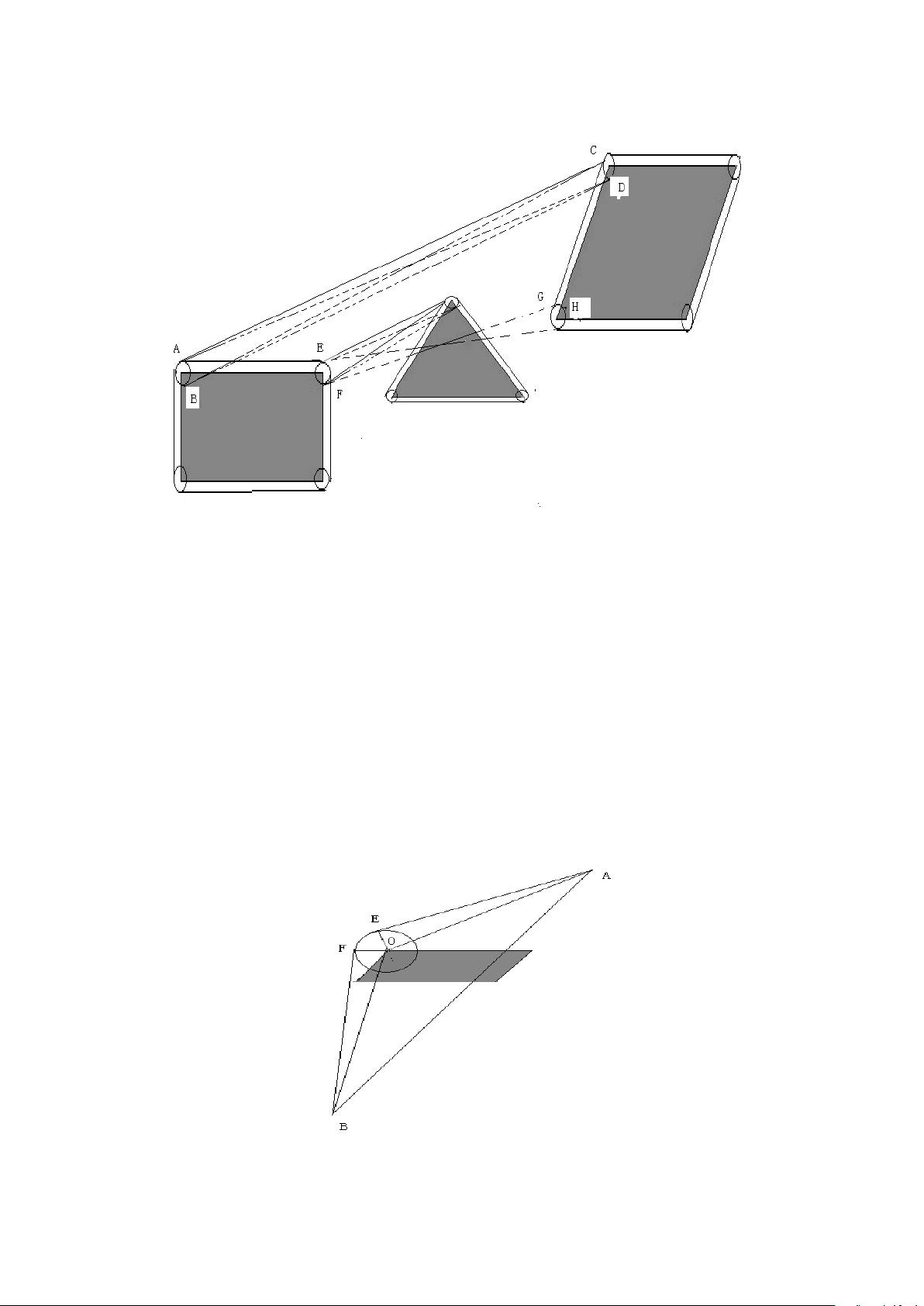
模型准备二:
切线的剔除:
基于上述准备一的三个前提条件和题中给出的两约束条件即(1)机器人的
行走路径由直线段和圆弧组成,不能折线转弯,转弯路径由与直线路径相切的一
段圆弧组成,且每个圆弧的半径最小为10个单位(2)要求机器人行走线路与障
碍物间的最近距离为10个单位。故存在一些不符合要求的切线,要将这些切线剔
除,可做示意图如下:
剩余37页未读,继续阅读
2021-09-27 上传
2021-10-10 上传
2021-10-10 上传
2022-04-29 上传
2021-10-08 上传
2021-08-14 上传

老帽爬新坡
- 粉丝: 93
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python中快速友好的MessagePack序列化库msgspec
- 大学生社团管理系统设计与实现
- 基于Netbeans和JavaFX的宿舍管理系统开发与实践
- NodeJS打造Discord机器人:kazzcord功能全解析
- 小学教学与管理一体化:校务管理系统v***
- AppDeploy neXtGen:无需代理的Windows AD集成软件自动分发
- 基于SSM和JSP技术的网上商城系统开发
- 探索ANOIRA16的GitHub托管测试网站之路
- 语音性别识别:机器学习模型的精确度提升策略
- 利用MATLAB代码让古董486电脑焕发新生
- Erlang VM上的分布式生命游戏实现与Elixir设计
- 一键下载管理 - Go to Downloads-crx插件
- Java SSM框架开发的客户关系管理系统
- 使用SQL数据库和Django开发应用程序指南
- Spring Security实战指南:详细示例与应用
- Quarkus项目测试展示柜:Cucumber与FitNesse实践
